СЭУ-последний Кирис Учебное пособие. Н. А. Козьминых Судовые энергетические установки и электрооборудование судов учебник
 Скачать 11.94 Mb. Скачать 11.94 Mb.
|

5.10. Судовые рулевые машины5.10.1. Назначение рулевых машин и требования к нимРулевая машина обеспечивает поворот руля в соответствии с сигналом с мостика и является составной частью рулевого устройства. Рулевое устройство состоит из четырех частей: – системы управления, – силового агрегата, – рулевого привода, – руля. Силовой агрегат и рулевой привод образуют собственно рулевую машину. Система управления или телепередача передает с мостика сигнал на поворот руля и обеспечивает работу силового агрегата и рулевого привода до тех пор, пока не будет достигнут заданный угол поворота руля. Силовой агрегат создает усилие, необходимое для поворота руля на заданный угол. Рулевой привод – это устройство, посредством которого осуществляется движение непосредственно руля. Рулевое устройство должно удовлетворять следующим требованиям: – иметь два независимых средства перекладки руля (при наличии двух силовых агрегатов, вспомогательный или резервный силовой агрегат не требуется); – мощность и вращающий момент агрегата должны быть такими, чтобы перекладка руля с 35 одного борта на 30 другого осуществлялась при максимальной скорости судна за время не превышающее 28 с; – вспомогательный рулевой привод должен обеспечивать перекладку руля с 15 одного борта на 15 другого не более чем за 60 с при скорости переднего хода, равной половине максимальной, но не менее 7 узлов; – рулевая машина должна быть защищена от ударных нагрузок ; – должно быть предусмотрено аварийное управление рулевой машиной из румпельного отделения; – танкеры, имеющие валовую вместимость более 10 000 р.т, должны иметь две независимые системы управления рулевой машиной с мостика. Рулевые машины могут иметь паровой, электрический и гидравлический привод. На современных морских судах используются рулевые машины с гидравлическим плунжерным либо лопастным приводом. 5.10.2. Электрогидравлические рулевые машиныЭлектрогидравлические рулевые машины состоят из следующих основных узлов: – гидравлического рулевого привода – устройства, поворачивающего баллер руля; – насосного агрегата (насос и двигатель), обеспечивающего питание гидравлических рулевых приводов рабочей жидкостью; – органов распределения рабочей жидкости и системы управления насосами и распределением рабочей жидкости; – системы трубопроводов питания, предохранительных клапанов, компенсаторов; динамических нагрузок, ограничителей мощности и других элементов в зависимости от конструкции рулевой машины. Гидравлические рулевые приводы – это гидродвигатели, обеспечивающие ограниченные углы поворота исполнительного вала, которым является баллер руля. Наиболее широкое распространение получили плунжерные приводы. В зависимости от значения необходимого вращающего момента применяется двух– либо четырех плунжерный привод. Принципиальная схема такого привода показана на рис. 74. 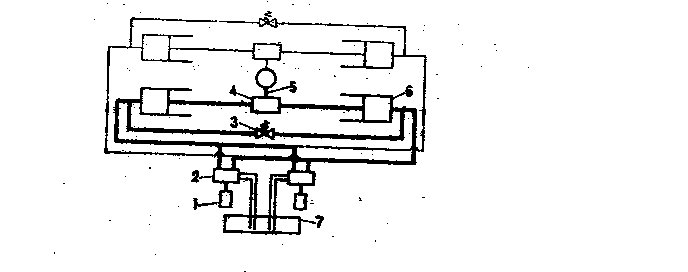 Рис. 74. Принципиальная схема плунжерного привода: 1– электродвигатель насоса, 2– насос, 3– предохранительный клапан, 4– муфта, 5– румпель, 6– цилиндр, 7– цистерна Плунжеры движутся в гидравлических цилиндрах, поворачивая румпель шарнирной крестовины, находящейся в развилке плунжеров. Привод обслуживается двумя насосами переменной подачи. Каждый из насосов сообщается трубопроводами со всеми гидравлическими цилиндрами рулевого привода для всасывания и нагнетания масла. Рядом с цилиндрами находится масляная цистерна, которая снабжена невозвратными клапанами для автоматического пополнения утечек масла из системы. Байпасный клапан объединен с предохранительным клапаном и открывается для перепуска масла в случае сильных ударов волны в перо руля. В этом случае плунжера смещаются, что в свою очередь, вызывает изменение подачи насоса, который нагнетает масло в соответствующий цилиндр, и перо руля возвращается в прежнее положение. Для защиты от поломки рычагов управления при ударной нагрузке используется буферная пружина. При обычных условиях эксплуатации работает один из насосов. Если требуется обеспечить ускоренную перекладку руля, оба насоса могут использоваться одновременно. На рис. 75 показано устройство 4-х плунжерной электрогидравлической рулевой машины. Такая машина создает больший вращающий момент и имеет повышенную надежность в случае выхода из строя различных частей установки. Каждый насос может работать на все цилиндры или на два цилиндра правого или левого борта. Наличие блока клапанов управления, объединяющего предохранительные клапаны, запорные клапаны насосов и цилиндров, байпасные клапаны, повышает живучесть рулевой машины. При нормальных условиях один насос может обеспечить работу всех цилиндров. В аварийной ситуации могут быть использованы два насоса с ручным управлением для работы двух плунжеров правого борта, двух – левого борта, двух носовых или двух кормовых плунжеров. 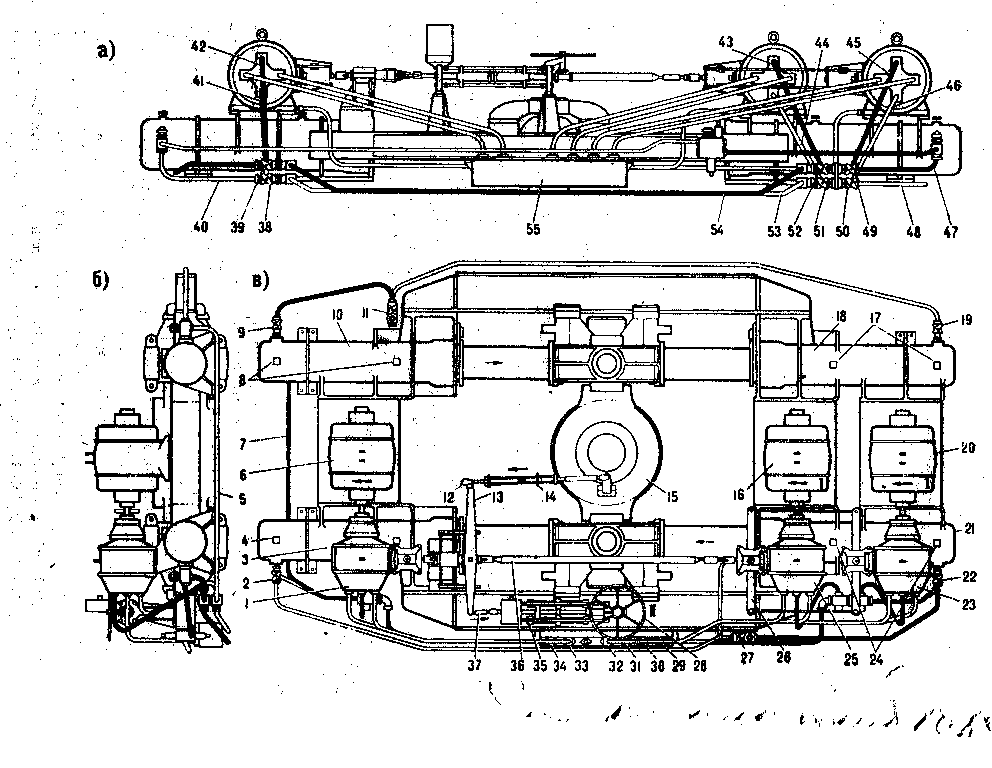 Рис. 75. 4-х плунжерная электро-гидравлическая рулевая машина: 1 ,23,25 – насосы переменной подачи, 2,9,19,22 – запорные клапаны цилиндров, 3,10,18,21 – гидравлические цилиндры с плунжерами, 4,8,17,24 – воздушные и манометровые запорные клапаны, 5,7,40,47,48 – масляные трубопроводы цилиндров,6,16,20 – электродвигатели, 11,27 – байпасные клапаны, 12,37 – соединительные звенья, 13,26 – плавающие рычаги, 14 – тяга буферной пружины, 15 – румпель, 28 – маховик местного поста управления, 29,30,31,32,33,34 – невозвратные всасывающие пополнительные клапаны, 35 – приемник телемотора, 36– соединительная тяга насосов, 38,39,49,50,51,52 – запорные клапаны насосов, 41,42,43, 44,45,46,53,54 – масляные трубопроводы между клапанами, 55 – цистерна пополнения масла. Для того, чтобы система была готова к работе, необходимо заполнить маслом каждый цилиндр рулевого привода, затем установить на место наполнительные пробки и закрыть воздушные краны. Байпасные клапаны при этом должны быть открыты, а цистерна для пополнения заполнена. Воздушные краны на насосах оставляют открытыми до тех пор, пока вытекающее масло содержит пузырьки воздуха. Используя механизм ручного управления, насосы ставят в положение минимальной подачи и проворачивают их вручную, удаляя воздух сначала из одной а затем из другой пар цилиндров. После этого включают электродвигатель насоса и приступают к проверке рулевой машины в действии. При этом еще раз удаляют воздух из цилиндров и насосов через соответствующие краны. В электрогидравлических рулевых машинах с роторным лопастным приводом рис. 76 лопастной ротор прочно закреплен на баллере. 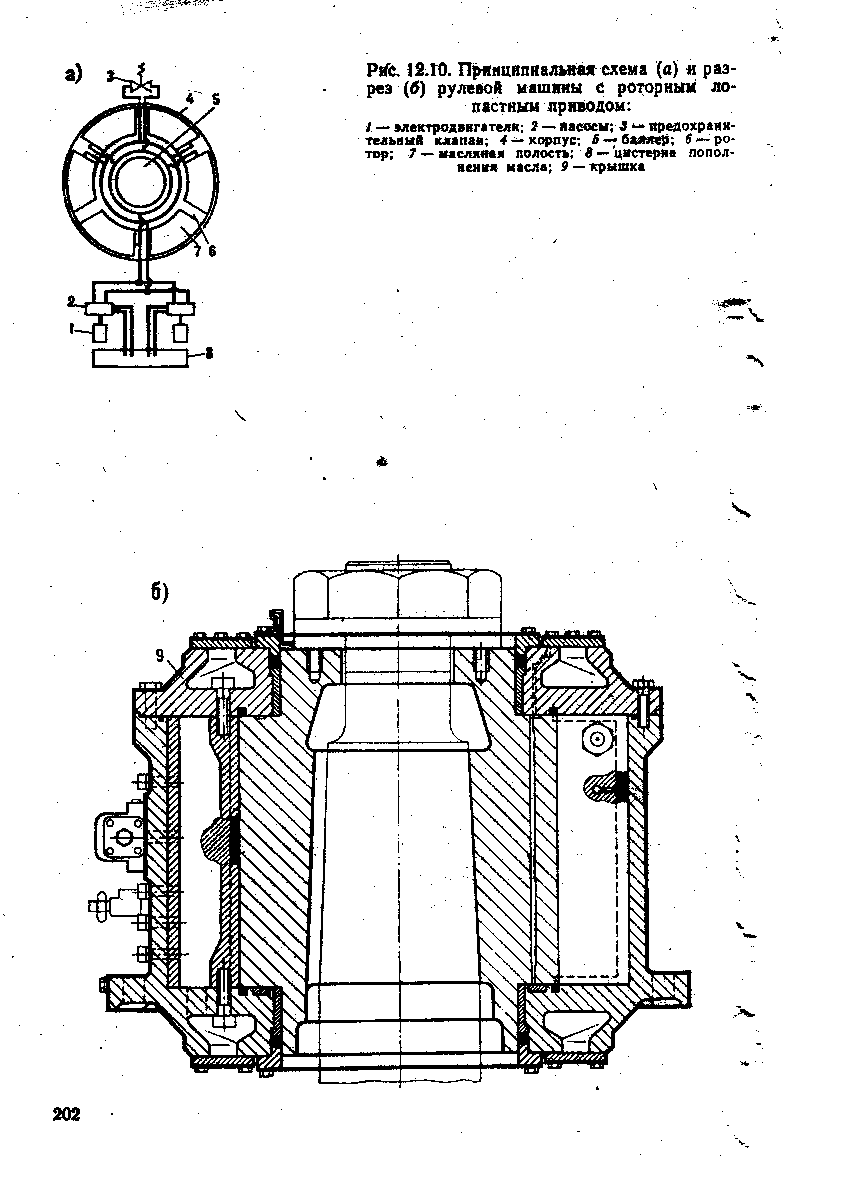 Рис. 76. Лопастной электро-гидравлический привод: а – принципиальная схема, б – разрез, 1 – электродвигатель, 2 – насосы, 3 – предохранительный клапан, 4 – корпус, 5 – баллер, 6 – ротор, 7 – масляная полость, 8 – масляная цистерна, 9 – крышка Ротор может поворачиваться в корпусе, который крепится к судовому набору. Пространство между лопастями ротора и перемычками корпуса образуют полости, объем которых изменяется при повороте ротора. Полости уплотнены специальной набивкой. С обеих сторон поворотных лопастей подведены трубопроводы, каждый из которых имеет кольцевой коллектор. При подаче масла во все полости с левой стороны поворотных лопастей и при всасывании масла из всех полостей с правой стороны обеспечивается поворот ротора по часовой стрелке. Для поворота в противоположном направлении всасывание и нагнетание меняются местами. Привод обычно имеет три лопасти, благодаря чему обеспечивается перекладка руля на 700. Перемычки корпуса выполняют функцию стопоров, ограничивающих поворот руля. 5.10.3. Телепередачи рулевых машинСистемы управления или телепередачи рулевых машин могут быть механическими, гидравлическими и электрическими. Применение механических телепередач возможно при условии малого расстояния от поста управления до рулевой машины, т.е. на малых судах. Для рулевых машин современных морских судов используются гидравлические и электрические телепередачи. На рис. 77 показано устройство гидравлической телепередачи. 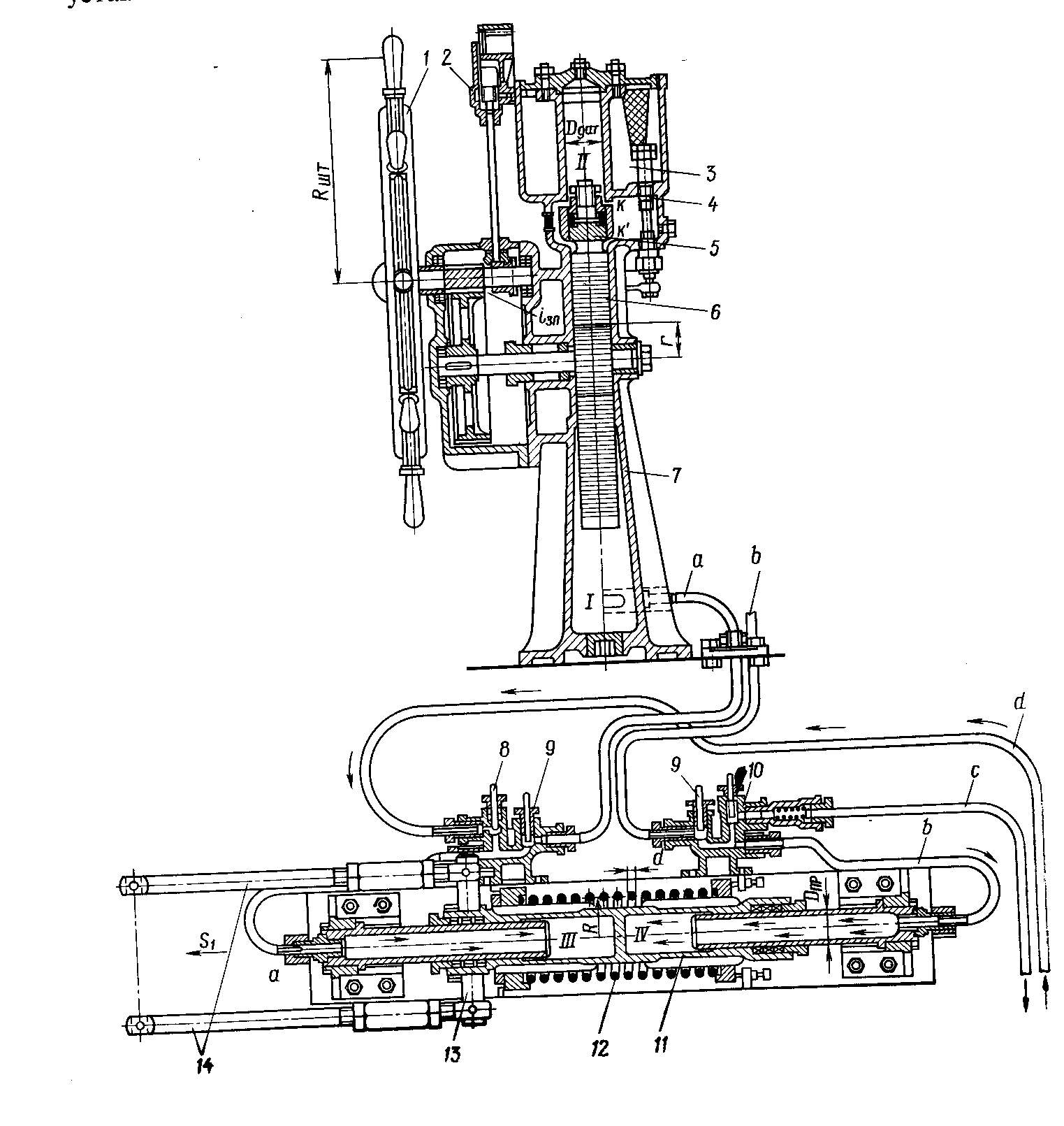 Рис. 77. Гидравлическая телепередача: Рис. 77. Гидравлическая телепередача:І, ІІ – рабочие полости, 1 – штурвал, 2 – аксиометр, 3 – буферный бачок, 4 – клапан, 5 – поршень, 6 – зубчатая рейка, 7 – датчик, 8,9 – разобщающие клапаны, 10 – сливной клапан, 11 – цилиндр, 12 – пружина, 13 – траверса, 14 – тяга Датчик 7 связан с приемником трубками “а” и “б”. При вращении штурвала 1 система шестерен перемещает зубчатую рейку 6 и поршень 5, который перемещаясь из среднего положения разобщает полости I и II колонки датчика 7. При этом за счет увеличения давления в одной из полостей перемещается цилиндр 11 приемника и сжимается пружина 12. Вместе с цилиндром перемещается траверса 13 и тяги 14, которые воздействуют на пусковую сиситему рулевой машины. С валом штурвала 1 связан аксиометр 2, показывающий положение руля. Расхождение показаний аксиометра и действительного положения руля не должно превышать 2. Для возвращения руля в среднее положение рулевой освобождает штурвал, пружина приемника телемотора 12 разжимается и ставит цилиндр 11 в среднее положение, что обеспечивает пуск машины для возврата руля в исходное положение. При возвращении цилиндра 11 в среднее положение в одной из полостей системы создается давление, возвращающее поршень 5, штурвал 1 и указатель аксиометра 2 в исходное положение. В случае, если из-за перепуска жидкости из полости в полость через неплотности поршень 5 не займет среднее положение, рулевой доводит его до этого положения поворотом штурвала. Полости будут соединены через каналы k, k' и объемы жидкости в них уравняются. Если при работе телепередачи во всасывающей полости датчика возникает вакуум, то жидкость из буферного бачка 3 через клапан 4 пополнит эту полость. При нагревании системы, например в результате повышения температуры наружного воздуха, давление в ней может превысить рабочее, тогда часть жидкости через клапан, установленный параллельно клапану 4, поступает в бачок 3. На рис. 78 представлена принципиальная схема контактной следящей электрической телепередачи. При повороте штурвала поворачивается контактный ротор "А" на заданный угол. Ток от положительного полюса судовой сети через включенную секцию сопротивления Wn по одному из проводов g, f, h, i пройдет на контактную шину ротора приемника В и обмотку возбуждения ОВ генератора 2, который вращается электродвигателем 1. Генератор запускает электромотор дистанционного управления 3, который через червячную передачу 4, червяк 9 и гайку 8 передвигает шарнир рычага 7. Левый конец рычага 7, воздействуя на тягу 10 и рычаг 11, переместит штоки 12 и скользящие блоки насосов 13 от среднего положения, включается подача насосов, что вызывает перемещение привода электрогидравлической рулевой машины. Поворот румпеля 5 через тягу обратной связи 6 вызовет поворот рычага 7 вокруг пальца гайки 8, возвращающий посредством тяги 10 и рычага 11, скользящие блоки в нейтральное положение. Руль остановится на заданном положении. Электромотор 3, вращая вал 9, повернет червячный сектор 14 и ротор приемника В на угол, равный по значению, но противоположный по направлению углу поворота датчика А. Поворот ротора приемника включает ток на противоположную обмотку возбуждения генератора ОІВ. Напряжение на клемах генератора станет равным нулю, и электромотор 3 остановится. 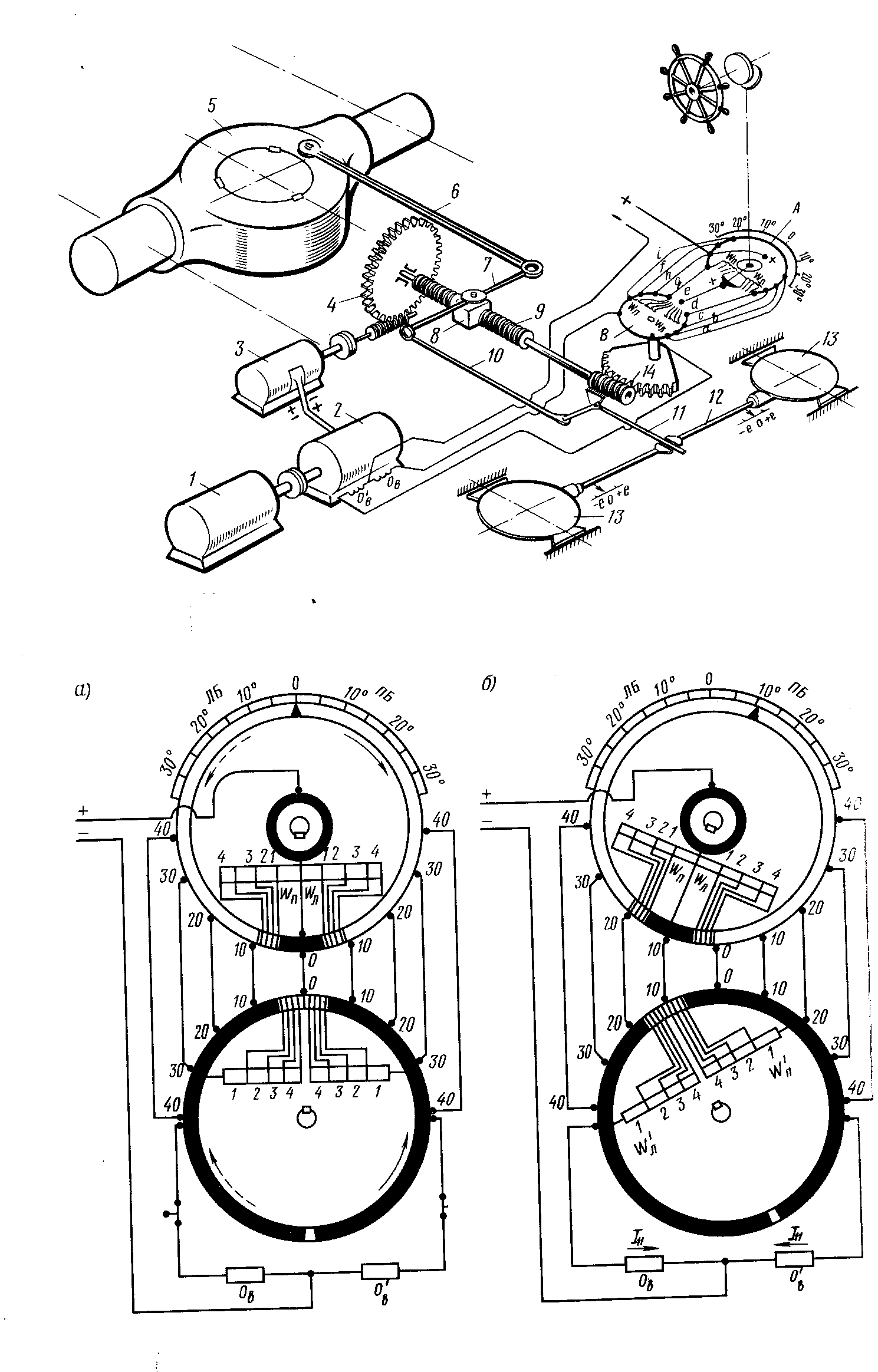 Рис. 78. Принципиальная схема следящей электрической телепередачи: 1 – электродвигатель, 2 – генератор, 3 – электродвигатель дистанционного управления, 4 – червячная передача, 5 – румпель, 6 – тяга обратной связи, 7 – рычаг, 8 – подвижная гайка, 9 – червяк, 10 – тяга, 11 – двуплечный рычаг, 12 – шток, 13 – скользящие блоки насосов, 14 – червячный сектор Каждому углу поворота датчика А соответствует равный и противоположный по направлению угол поворота приемника В, а следовательно, определенное число оборотов электромотора 3 и соответствующее смещение скользящих блоков насосов. Это обеспечивает угол поворота руля, пропорциональный углу поворота датчика А с последующим возвращением тягой обратной связи 6 блоков насосов в нейтральное положение. Достоинством электрических телепередач описанного типа являются: – малые усилия на штурвале; – возможность управления рулевыми машинами любых мощностей; – высокая точность управления. |