задача, ГРП. Общий раздел 1 Виды Безбалансирных приводов шсну
 Скачать 2.24 Mb. Скачать 2.24 Mb.
|

ВведениеИспользование управляемого привода для добычи нефти позволяет снизить энергопотребление в процессе добычи нефти на 25 30%, а также снизить затраты на производство, транспортировку и эксплуатацию наземного привода. Перспективный подход к снижению себестоимости добычи нефти можно считать введение в эксплуатацию бездействующих скважин за счет применения привода(не действующих скважин из-за болотистой почве или из-за малодебитного режима может быть введен в эксплуатацию, тип привода может оказать давление на поверхность наблюдений от больше чем 0. 2 кг/см2 и возможной бесконечности переменные в рабочем режиме, в широком диапазоне от 0. 5 до 8 качаний в минуту - позволяет выбрать режим, который соответствует личностным характеристикам скважин). Общий раздел 1.1 Виды Безбалансирных приводов ШСНУПомимо привода, база которого представляет собой взвешенный баланс, в Российской Федерации и за рубежом было создано и использовано несколько безбалансирых приводов. Преимуществами этих двигателей являются снижение общего размера двигателя, улучшение условий обслуживания, снижение содержания металла, повышенная портативность и увеличение емкости. Главной отличительной чертой безбалансирных СК является отсутствие взвешенного баланса. Безбалансирные станки-качалки ПНКШ (с кривошипно-шкивным преобразующим механизмом) используются для привода погружного штангового насоса. ПНКШ имеют оригинальную конструкцию кривошипно-шкивного механизма преобразования с V-образным расположением ветвей каната, а это значит, что отсутствуют массивный качающийся балансир и громоздкая поворотная головка у балансирной качалки, что позволило многократно снизить динамические нагрузки, обеспечить высокую степень уравновешивания, а также полное отсутствие отрицательных крутящих моментов на редукторе. 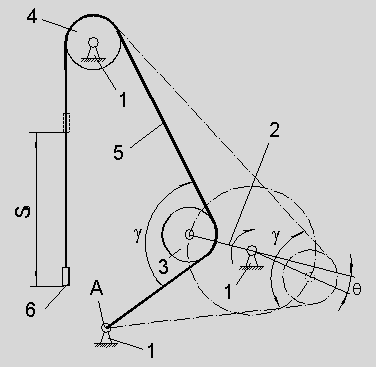 Рис. 30. Кинематическая схема кривошипно-шкивного преобразующего механизма привода ПНКШ 1- Стойка (трехполюсная) 2- Кривошип приводной 3- Шкив натяжной 4- Шкив направляющий 5- Гибкое звено (канат) 6- Ходовая траверса А - точка крепления неподвижного конца каната 5 g - угол между V-образно расположенными ветвями каната 5 q - угол дезаксиала S0 - длина хода ходовой траверсы (max) Назначение привода - придание плунжеру скважинного штангового насоса возвратно-поступательного движения посредством колонны насосных штанг. Привод работает следующим образом. Кривошипы 2, вращаясь в направлении, указанном стрелкой, ведут себя на веревках вокруг него с 3 напряженными импульсами. Так как некоторые из краев этих канатов фиксируются, другие конечности, определяемые доказательствами, устанавливаются, наряду с обратным разделом 6, движение аналогично сделано, где насос стержня хорошо управляется серией стержней, расположенных на глубине. Кроме того, g угол между V-образными ветвями каната в каждом цикле цикла бега привода изменяет его значение от большего к более низкому, когда тяга вверх и, наоборот, от меньшего к большему, когда она вниз. Это изменение угла между V-образными ветвями каната, наличие оптимального помехи, имеет значительное положительное влияние на структуру изменения крутящего момента на ручке, вызванной загрузкой хорошо, которая работает на полосе привода, путем привлечения закона изменения вращения ближе к полностью потребляемой зубной крутящий момент с прекрасным балансом, который изменяется в течение точно в синусоиде. Второй тип приводов является цепными приводами. Процессор был запущен в начале 1990-х годов в Канаде, Китае, а затем в нашей стране. Конструкция привода состоит из вертикальной рамы, на которой вращается цепь (рисунок 2.6). Гибкий ремень крепится к одному из цепных колец и делает взаимные движения. Другой конец ремня привязан к канатной подвеске. На рисунке 2.7 показаны разработанные институтом ТатНИПИНефть цепные приводы типа ЦП80-6-1/4. 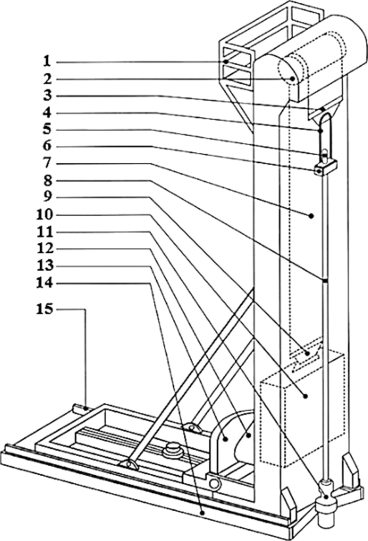 Рис. 2.6. Схема цепного привода ШГН: 1 - платформа с ограждением; 2 - шкив; 3 -траверса ремня; 4 - канатная подвеска;5 - замок штока; 6 - траверсы канатной подвески; 7 - ремень; 8 - полированный шток; 9 - звено соединения противовеса с ремнем; 10 - противовес; 11 - устье скважины; 12 - редуктор; 13 - кожух ременной передачи от ЭД; 14 - основание; 15 - полозья Цепные приводы ЦП80-6-1/4 ТатНИПИНефть  Рис. 2.7. Цепные приводы ЦП80-6-1/4 ТатНИПИНефть Одной из современных альтернатив СК для фонда УШГН служат линейные приводы ШГН, обладающие рядом преимуществ по сравнению с СК. 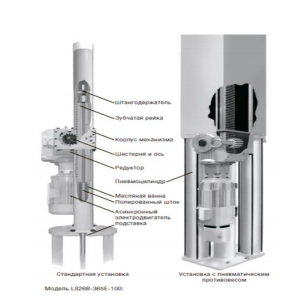 Рис.6. Варианты конструкции линейного привода  Рис.7. Система линейного привода Unico на скважине данного месторождения Во-первых, гидропривод обеспечивает большую начальную скорость подъема штока по сравнению со станком-качалкой и улучшает работу клапана скважинного насоса. 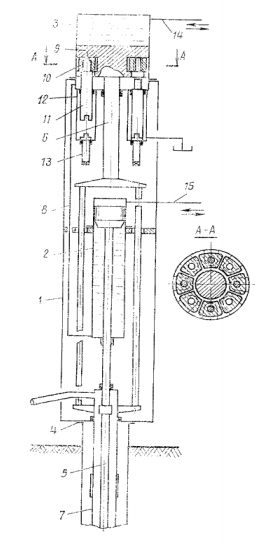 Рис.8. Схема гидравлического привода СШНУ |