Курсовая работа Осн.авт.. Основы автоматики
 Скачать 182 Kb. Скачать 182 Kb.
|

|
МИНИСТЕРСТВО ТРАНСПОРТА РОССИИ Федеральное агентство морского и речного транспорта Государственная морская академия имени адмирала С.О. Макарова Кафедра «Двигатели внутреннего сгорания и автоматика судовых энергетических установок» Курсовая работа по дисциплине “ОСНОВЫ АВТОМАТИКИ “ Пояснительная записка Исполнитель курсант А.А. Алексеевский 452 группа Руководитель Ю.С. КлимовСАНКТ-ПЕТЕРБУРГ2006 Оглавление §1. Требования к САР частоты вращения судовых дизельных установок 3 §2. Уравнение динамики заданной САР 6 §3. Основные свойства системы регулирования 9 §4. Условия работы дизеля 13 §5. Регулирование параметров цикла пар-конденсат судовой паротурбинной установки танкеров типа “Крым” 20 Графики переходных процессов 20 Список использованной литературы 22 §1. Требования к САР частоты вращения судовых дизельных установок Судовые двигатели обычно эксплуатируют на заданных скоростных режимах. Так, если судно совершает переход из одного порта в другой, то ГД длительное время работает при номинальной частоте вращения вала, обеспечивая движение судна с заданной скоростью. Однако изменение условий движения судна приводит к изменению нагрузки и скоростного режима работы двигателя. При этом усилие встречного ветра и волнение моря могут привести к снижению скорости судна по сравнению с заданной или недопустимым для нормальной эксплуатации динамическим напряжениям в деталях ГД. Поэтому важно обеспечить поддержание заданной и ограничение максимальной частот вращения вала двигателя. Вместе с тем, при манёврах или в других случаях возникает необходимость перевода ГД на другие скоростные режимы с последующей их стабилизацией для обеспечения движения судна при пониженной или повышенной скорости. Наличие САР повышает качество поддержания заданного скоростного режима двигателя по сравнению с ручным регулированием и обслуживающий персонал освобождается от выполнения этой функции. В процессе регулирования регулятор частоты вращения должен обеспечивать:
Кроме того, к самим регуляторам предъявляют ряд требований в отношении надёжности работы, простоты конструкции, габаритных размеров, стоимости, срока службы и т.д.ругие тем, при манёврах или в других случаях возникает необходимость перевода ГД на яжениям в деталях ГД.Поэтому важно обеспеч Частота вращения коленчатых валов в дизельных установках является важнейшим качественным параметром, характеризующим энергию, вырабатываемую двигателем. Численное значение частоты вращения n в установившихся режимах задают исходя из нужд потребителя(обеспечение требуемой величины упора движителя, требуемой частоты тока генератора и т.д.); в неустановившихся режимах(пуск, остановка, изменение скоростного режима, реверсирование) частоту вращения задают и изменяют исходя из соображений обеспечения безаварийной работы установки. Все дизельные установки снабжают регуляторами скорости (частоты вращения), выполняющими функцию стабилизации частоты вращения n. Требования к средствам автоматизации и качеству переходного процесса регулирования n в дизельных установках регламентированы ГОСТ 10511-83 и Правилами Регистра России. Они накладывают определённые ограничения на характер изменения регулируемого параметра при переходе двигателя с одного установившегося режима на другой. При разработке и анализе свойств системы регулирования нижеследующие величины не должны выходить за указанные пределы. Степень нечувствительности ε не должна превышать для систем: дизель-генераторов ± 0,2 %; главных двигателей ±1 %. Средняя степень неравномерности δ, характеризующая наклон статической характеристики в относительных координатах, должна настраиваться в пределах для систем:
Продолжительность или время переходного процесса п при мгновенном полном сбросе (набросе) нагрузки для систем: дизель-генераторов ≤ 5 с; главных двигателей ≤ 10 с. Заброс регулируемого параметра Δφз для систем: дизель-генераторов при скачке нагрузки от полной до нуля ≤ 5% ; главных двигателей, работающих в условиях эксплуатации, ≤ 10% ; при мгновенном сбросе нагрузки ≤ 15%. §2. Уравнение динамики заданной САР Исходные данные
Структурная схема регулятора непрямого действия (усилитель).  Рис. 1 Рис. 1Уравнение динамики заданной САР получают из уравнений динамики обобщённой САР путём исключения из них лишних членов. Для начала запишем уравнение динамики объекта: Где Та – время объекта, с; z – относительный коэффициент самовыравнивания; φ – относительное изменение регулируемой величины; , – относительное изменение координат регулирующего и нагрузочного воздействия на объект соответственно. Далее запишем уравнения динамики функциональных элементов регулятора.
В данном случае i , j – равны нолю и уравнение измерителя примет следующий вид: 2) Уравнение управляющего элемента, полагая, что это идеальное звено, т.е. отсутствуют силы инерции, трения, зазоры. σ = 3) Уравнение динамики исполнительного механизма ИМ - это двухсторонний поршневой сервомотор. Скорость перемещения поршня прямо пропорциональна величине открытия окон золотника, т.е. прямо пропорциональна величине выходного сигнала σ УЭ. Следовательно, ИМ является интегрирующим звеном. Где Тs –время исполнительного механизма 4) Уравнение механизма связи = -кус Где к – коэффициент усиления, принимаемый равным 1; – выходная координата механизма связи Представим полученную систему уравнений регулятора в виде одного уравнения. Для этого произведём несколько замен: а) б) Далее решим это уравнение относительно = -Тs Теперь необходимо найти первую и вторую производные от  Найденные значения подставим в первое уравнение Запишем уравнение системы регулирования в форме одного уравнения n-го(4) порядка. Для этого выразим значение из уравнения объекта и найдём его производные. Подставим найденные значения и её производных в уравнение регулятора. После алгебраических преобразований получим: §3. Основные свойства системы регулирования Для предварительной оценки статических и динамических свойств системы регулирования необходимо из уравнений динамики исключить промежуточные переменные и получить одно уравнение, что было продемонстрировано выше. Кроме этого при предварительной оценке из уравнения исключается степень нечувствительности измерителя и. С учётом вышепринятых допущений уравнение динамики САР будет иметь следующий вид Где а0, а1, а2, а3, В – числовые коэффициенты Данное уравнение позволяет оценить статические и динамические свойства системы. В статике все производные равны нулю, и уравнение примет вид φ0=0.Следовательно, система астатическая, т.е. на всех установившихся режимах регулируемая величина остаётся постоянной. Для оценки устойчивости можно воспользоваться критерием Гурвица или диаграммой Вышнеградского. В том и другом случае необходимо вычислить значения коэффициентов уравнения а0, а1, а2, а3, (см. выше). Так же за начало отсчёта принимается новый установившийся режим, т.е. =0. Тогда уравнение будет иметь вид Определим устойчивость с помощью критерия Вышнеградского. Вычислим значения параметров x и y. Далее найдём произведение параметров x и y. xy=1,35 >1 Это значит, что данная система регулирования будет устойчива. Для определения качества переходного процесса необходимо сделать подстановку Эйлера, найти значения φ и её производных и получить корни характеристического уравнения. Подстановка Эйлера: полагаем, что φ=еwt,где w – неизвестная величина. Найдём производные: Подставим полученные значения в уравнение динамики системы. а0w3+a1w2+a2w+a3=0 –характеристическое уравнение В общем случае корни характеристического уравнения могут быть выражены комплексными числами wi= Ii iI Применительно к заданной системе регулирования переходный процесс является апериодическим, т.е. его график лежит во 2 ой зоне диаграммы Вышнеградского справа от границы устойчивости. §4. Условия работы дизеля. Судовые дизельные установки состоят из двигателя и систем, обеспечивающих его функционирование: топливоподачу, воздухоподачу, смазывание, охлаждение, пуск, реверс, ручное и автоматическое управление. режимы работы двигателей характеризуются совокупностью многих параметров, определяющих эффективную мощность Ne, и экономичность (эффективный КПД е или эффективный удельный расход топлива gе). К числу этих параметров относятся: крутящий момент М, угловая скорость вала , положение органа топливоподачи h, давление наддува рн, температура охлаждающей воды Т и др. Поэтому функциональная зависимость эффективной мощности Ne(м; ; h; рн;Т… ) Двигатель может работать в установившихся и в неустановившихся режимах. Режим работы двигателя называется установившимся (статическим), если значения его параметров во времени сохраняются постоянными. Это возможно, если условия работы двигателя на подводе и отводе энергии неизменны, т.е. существует равенство произведённой двигателем и израсходованной потребителем энергии. При этом Ме-Мс=0, где Ме- эффективный крутящий момент, а Мс- момент сопротивления вращению гребного винта. Равенство моментов может быть справедливо при различных режимах, которым соответствуют различные значения параметров. Диапазон изменения каждого параметра обуславливается конструктивными и эксплуатационными особенностями двигателей. Так, частота вращения вала двигателя может изменяться в ограниченных пределах. Максимальное значение частоты лимитируется прочностью элементов двигателя, а минимальное возможностью устойчивого поддержания режима работы. Между параметрами, характеризующими работу двигателя на каждом установившемся режиме, существуют определённые функциональные зависимости. Этим функциональным зависимостям соответствуют статические характеристики, построенные в координатах установившихся параметров. С точки зрения анализа режимов работы двигателя наибольший интерес представляют статические характеристики и функции, выражающие зависимости между наиболее важными параметрами двигателя (Ne,. Ме, , h, Т и др.) Рассмотрим статические характеристики эффективной мощности Ne, и эффективного крутящего момента Ме как функции частоты вращения вала двигателя. Эти характеристики называют частичными, поскольку положение каждой из них определяется частичной топливоподачей или частичным положением топливорегулирующего органа. При этом h1 >h2> h3. В процессе управления двигателем при перемещении топливорегулирующего органа с целью увеличения топливоподачи статическая характеристика эффективной мощности или эффективного крутящего момента перемещается вверх. ала двигателя может изменяться конструктивными и эксплуатационными особенностями двигателей. 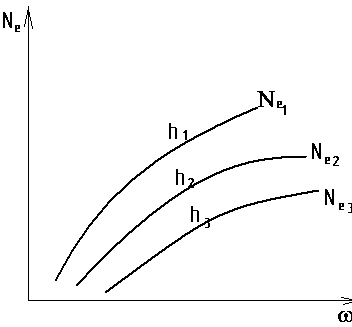 Рис. 2 Статические характеристики эффективной мощности двигателя. Рис. 3 Статические характеристики эффективного крутящего момента 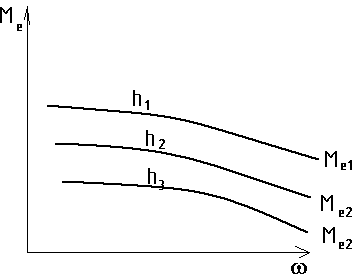 Статические характеристики зависимости мощности (момента) сопротивления Nс вращению гребного винта от частоты вращения вала двигателя называют винтовыми характеристиками. Винтовые характеристики момента сопротивления соответствуют закону квадратичной параболы: Мс=Км2, а винтовые характеристики мощности сопротивления – закону кубической параболы: Nc=KN3. Винтовые характеристики являются характеристиками нагрузки для двигателя, работающего на гребной винт. Положение этих характеристик зависит от условий движения судна и гребного винта (силы и направления ветра, степени волнения моря. глубины фарватера, состояния поверхностей корпуса судна и винта, осадки судна, и других факторов), при изменении которых изменяется скорость судна и относительная поступь винта р=с/(вD), где с- скорость судна; D – диаметр гребного винта; в – частота вращения гребного винта. Винтовая характеристика будет смещаться влево и вверх, если условия движения судна будут ухудшаться (возрастёт сила встречного ветра, обрастёт поверхность корпуса судна и т.п.) и относительная поступь винта будет уменьшаться, т.е. р3 > р2 > р1. В случае работы ГД на винт регулируемого шага положение винтовой характеристики, кроме того, будет зависеть от шагового отношения H/D. Причём с увеличением шагового отношения винтовая характеристика будет смещаться влево и вверх, т.е. H/D1 > H/D2 > H/D3. Пересечение характеристик эффективной мощности и мощности сопротивления вращению гребного винта определяет точку установившегося режима работы двигателя, для которой справедливо равенство Ме-Мс=0. На рисунке 4 установившимся режимам соответствуют точки пересечения характеристик А, В, С, которые получаются в процессе управления двигателем при переходе с малого на средний и затем полный ход в результате перестановки топливорегулирующего органа на увеличение подачи топлива. 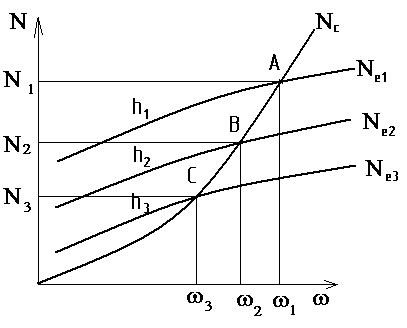 Рис. 4. Установившиеся режимы работы двигателя при различных значениях топливоподачи. При работе двигателя с заданной топливоподачей, например в режиме полного хода, также возможны различные установившиеся режимы, что наблюдается при изменении условий плавания судна (р3 р2 р1.) или при управлении пропульсивной установкой посредством изменения шага винта (H/D3 H/D2 H/D1.). В реальных условиях работы СЭУ могут происходить одновременные изменения положений статических характеристик эффективной мощности и мощности сопротивления. Установившиеся режимы работы двигателя лимитируются статическими характеристиками максимальной и минимальной эффективных мощностейNe1(hmax) или Ne2(hmin), минимальной мощности сопротивления Nс2(р max), граничными линиями минимально и максимально допустимых частот вращения вала (min и max). Эти характеристики и линии соответствуют предельным физическим возможностям двигателя и определяют область его возможных рабочих режимов. Эксплуатация ГД проводится с учётом расположения заградительной характеристики ЗД, которая устанавливается заводом-изготовителем по предельному крутящему моменту или пределу дымности сгорания топлива. Вывод: с увеличением времени объекта, заброс уменьшается, время переходного периода увеличивается, φ остаточное уменьшается. РЕГУЛИРОВАНИЕ ПАРАМЕТРОВ ЦИКЛА ПАР-КОНДЕНСАТ СУДОВОЙ ПАРОТУРБИННОЙ УСТАНОВКИ ТАНКЕРОВ ТИПА «КРЫМ» Исследованию вопросов регулирования параметров цикла пар- конденсат посвящены работы [1, 2, 3, 4, 5], а результаты этих исследований реализованы на целом поколении паротурбинных судов отечественной постройки (типа «Пекин», «Ленинский комсомол», «София»). Полученный опыт использован при создании системы регулирования ПТУ танкеров типа «Крым», снабженных новой высокоэкономичной энергетической установкой. Конкретные задачи регулирования параметров цикла «пар- конденсат» вытекают из принятой тепловой схемы установки и дополнительных требований к системе регулирования. Тщательный анализ этих данных, необходимых при проектировании, позволил сформулировать общие технические требования, с позиций которых велись разработка и создание системы регулирования параметров цикла пар-конденсат. Существо их сводилось в основном к следующему:
Поскольку указанные требования тесным образом взаимосвязаны, задача создания системы регулирования, оптимально удовлетворяющей этим требованиям, может быть успешно решена лишь при комплексном подходе к проектированию. В установке предусматривается автоматическое поддержание уровня во вспомогательном конденсаторе, подогревателях питательной воды высокого и низкого давления, деаэраторе, а также поддержание давления в магистралях охлажденного и отработавшего пара. В главном конденсаторе уровень конденсата на нагрузках, близких к номинальной поддерживается посредством саморегулирования производительности кавитирующих конденсатных насосов. Поддержание давления в магистрали охлажденного пара осуществляется двумя регуляторами РД5 и РД6, включенными параллельно на общую магистраль. Охлажденный пар подается к трубопроводам вспомогательных механизмов, и том числе к блоку приводных агрегатов (БПА). Нормальная работа лабиринтовых уплотнений ГТЗА обеспечивается традиционным способом за счет поддержания в уравнительном коллекторе небольшого избыточного давления при помощи сдвоенного регулирующего клапана, который в случае понижения давления открывает подачу пара из магистрали II отбора в коллектор, а в случае его повышения открывает сброс пара из коллектора в магистраль 1 отбора, имеющую более низкое давление(регулятор давления РД2-астатический). Уровень во вспомогательном конденсаторе поддерживается с помощью регулятора РУ1 (см. рис. 1) путем дросселирования напорной магистрали конденсатного насоса. Список использованной литературы
| |||||||||||||||||||||||||