реферат. Основные положения метода конечных элементов и суперэлементов
 Скачать 45.94 Kb. Скачать 45.94 Kb.
|

|
Основные положения метода конечных элементов и суперэлементов Метод конечных элементов (МКЭ) занимает исключительное место в теории расчета конструкций, а его обобщение – метод суперэлементов – позволяет естественным образом ввести и описать идеею иерархически построенных сложных систем. 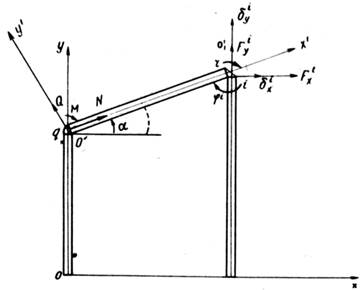 Рассмотрим плоскую раму каркаса промышленного здания, стойки которой жестко защемлены в фундаментах, а ригели жестко прикреплены к стойкам. Ограничим рассмотрение случаем, когда на раму действует только узловая нагрузка. Пронумеруем узлы – точки пересечения осей стержней друг с другом и “землей”. В каждом узле i рамы на нее могут действовать сосредоточенные силы Fx, Fy и момент М , заданные в некоторой глобальной системе координат, связанной с рамой. Рассмотрим плоскую раму каркаса промышленного здания, стойки которой жестко защемлены в фундаментах, а ригели жестко прикреплены к стойкам. Ограничим рассмотрение случаем, когда на раму действует только узловая нагрузка. Пронумеруем узлы – точки пересечения осей стержней друг с другом и “землей”. В каждом узле i рамы на нее могут действовать сосредоточенные силы Fx, Fy и момент М , заданные в некоторой глобальной системе координат, связанной с рамой.Введем в рассмотрение вектор {Fi} обобщенных сил, действующих на раму в узле i  (1) (1)Совокупность внешних воздействий на всю раму будет характеризоваться вектором {F}:  (2) (2)Где N-число узлов рамы. Размерность этого вектора 3хN (пока не учитываем факт прикрепления некоторых узлов к “земле”). Под действием внешних сил {F} стержни рамы получают деформации, а узлы переместятся. После перемещения узлов рамы будем описывать в глобальной системе координат. Перемещения {di} каждого узла характеризуется тремя числами – линейными перемещениями d xi , d yi и углом поворота j i , являющимися компонентами вектора обобщенных перемещений узла d i :  (3) (3)А перемещения всей рамы вектором d :  (4) (4)Здесь, как и выше, не учитываются условия закрепления стоек рамы и узлов. Напряженно-деформированное состояние каждого стержня удобнее характеризировать в локальной системе координат, связанной с ним. Ось х’ этой системы координат направим от “начала” q стержня к его “концу” r (понятие “начало” и ‘конец” условны и нужны только для того, чтобы задать положительное направление на оси х’), ось у’ – в плоскости рамы, а ось z’ – перпендикулярно плоскости. Положительные направления осей y’ и z’ выберем так, чтобы они образовывали с x' правую систему координат. Проведем в каждом стержне рамы по 2 поперечных сечения на расстоянии, бесконечно близких к узлам – концам стержней q и r . В каждом из полученных решений в общем случае действуют три усилия N, Q, M, приложенные к узлу. Введем вектор обобщенных усилий в сечении с’ стержня m:  (5) (5)И вектор усилий {fm}, характеризующий напряженное сечение стержня m через векторы усилий в его концевых стержнях q и r (“начале ” и “конце”)  (6) (6)(штрих означает, что компоненты {fm’} вычислены в локальной системе координат). Вектор {fm’} полностью характеризует напряженно-деформированное состояние стержня, если к его внутренним точкам не приложены внешние воздействия и известны жесткостные характеристики стержня. Разумеется шесть компонент вектора {fm’} связаны между собой уравнениями равновесия стержня как жесткого тела, но эти уравнения в явном виде далее не используются. Напряженно-деформированное состояние того же стержня характеризуется и вектором обобщенных перемещений концов стержня q и r , который строится из соответствующих компонент вектора, см. выражение (4):  (7) (7)Отметим, что при таком введении вектора обобщенных перемещений стержня его напряженно деформированное состояние зависит не только от значений {dm}, но и от способов прикрепления стержня m к узлам q и к и его жесткости. Например, если бы конец q ригеля был присоединен к стойке шарнирно, то усилие М в сечении q было бы равно нулю, независимо от значений компонент {dm}. Компоненты вектора {fm’} заданны в локальной системе отсчета, а компоненты вектора {dm} – в глобальной. Для установления связи векторов {fm’} и {dm} в простейшем виде запишем компоненты {dm} тоже в локальной системе отсчета, связанной с рассматриваемым стержнем. Обозначим матрицу преобразования координат  (8) (8)через [L]:  (9) (9)Тогда, например, компоненты Аналогично компоненты вектора Векторы обобщенных усилий и перемещений для стержня, выраженные в локальной и глобальной системах отсчета, связаны соотношением где матрица [Λ] имеет вид Введем матрицу жесткости стержня [km’], характеризующую связь между векторами {fm’} и {dm} |