диплом. диплом — копия. Основное назначение папильонажных лебедок
 Скачать 261.25 Kb. Скачать 261.25 Kb.
|

 Введение. Основное назначение папильонажных лебедок - это обеспечение рабочих перемещений земснаряда по разрабатываемой прорези согласно технологическому режиму. Так как дноуглубительная техника требует высокой оснащенности, включает множество систем и механизмов, сложных в обслуживаний и управлении, есть смысл в совершенствовании и модернизации этой техники, с целью увеличения производительности, надежности оборудования и экономичности. Во время работы земснаряда при разрабатывании грунта, судну периодически необходимо перемещаться, что представляет довольно сложный процесс. Текущий электропривод лебёдок перемещения управляется с помощью электромеханических реле и контакторов, что имеет низкую надежность, так как в конструкции данных коммутационных аппаратов есть много подвижных деталей, система управления работает на постоянном токе с использованием бесконтактных выключателей, эта система имеет множество проводов, что приводит к снижению энергоэффективности и сложности обслуживания оборудования, двухскоростной асинхронный электродвигатель имеет ступенчатую регулировку скорости в узком диапазоне. Внедрения частотной регулировки скорости асинхронного электродвигателя приведет к возможности регулировать скорость лебёдки в более широком диапазоне и обеспечит плавное изменение скорости. Это приведёт к снижению энергопотребления, к удобству управления электроприводом и его обслуживании. Объект исследования: земснаряд «Портовый – 12» проекта 92-034 (Чехословакия) . Предмет исследования: электропривод папильонажных лебёдок. Целью данной работы является разработка экономичного и надежного с плавной регулировкой скорости в широком диапазоне электропривода папильонажных лебедок с использованием современных технических средств. Задачи: провести анализ предметной области; провести анализ существующего электропривода папильонажной лебёдки судна; сформулировать обоснование модернизации электропривода папильонажной лебёдки и пути решения; провести расчет существующего электропривода папильонажной лебёдки; провести расчет и обосновать выбор предлагаемого электропривода папильонажной лебёдки; провести сравнительный анализ существующего и предлагаемого электропривода папильонажной лебёдки; обосновать выбор электропривода папильонажной лебёдки; рассчитать нагрузочные параметры судовой электростанции после введения нового оборудования; рассчитать и обосновать выбор электрических аппаратов; провести экономическое обоснование проекта; изучить и привести требования по охране труда. 1 Исследовательский раздел 1.1 Описание технологического процесса земснаряда при разработке грунта. При разработке проризей земснарядами используется два вида перемещений: а) траншейный (во время грунтозабора земснаряды совершают продольные рабочие перемещения - вдоль прорези). б) Папильонажный (совершают поперечные рабочие перемещения - от одной кромки прорези к другой). Разработка грунта папильонажным способом происходит следующим образом: Сначала закладываются якоря: якорь носовой становой лебёдки, боковые якоря папильонажных лебедок (два боковые носовые и два боковые кормовые и при необходимости якорь лебёдки становой кормовой. Затем рамоподъемной лебёдкой опускается черпаковое устройство. Начинаются рабочие перемещения и разработка грунта. Во время разработки грунта носовая становая лебедка остается заторможенной. Земснаряд с помощью папильонажных лебедок совершает рабочие перемещения от одной кромки прорези до другой (справа - налево и наоборот). Например, пройдя от левой кромки прорези до правой, земснаряд подтягивается вперед становой носовой лебедкой на необходимое расстояние (от линии 1 до линии 2, также называется подачей) которое определяет ширину снимаемого грунта вдоль всего рабочего перемещения между правой и левой кромками. При неизменном положении носового станового якоря может изменяться кривая провисание станового троса. Это происходит от различных факторов, таких как неровность дна изменения в силе течения и т.д. Изменения в натяжении станового троса влекут за собой перемещение точек соприкосновения троса с дном, что сказывается в изменении траектории земснаряда. А именно, он начинает смещаться в направлении станового каната. Чтобы уменьшить влияние задевания станового троса за дно, под канат заводят понтон, который приподнимает трос в месте наибольшего провисания. По мере постепенного приближения земснаряда к якорю и тем самым к понтону, угол поднятия троса от понтона к судну увеличивается, так как понтон закреплен на тросе подвижными роликами, он откатывается в сторону якоря. Таким образом сводятся к минимуму нежелательные задевания троса за дно. На рисунке 1.1. - дугой 5 изображена траектория рабочих перемещений 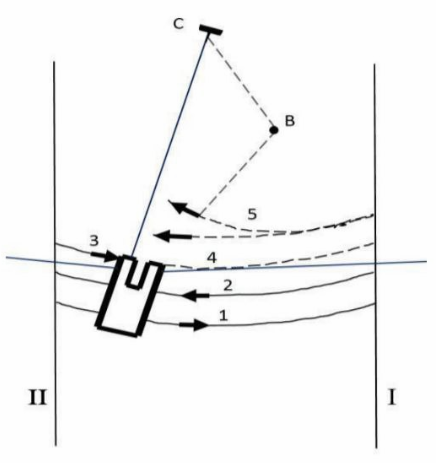 земснаряда, после смещения, из-за задевания станового каната за точку В. Рисунок 1.1 - Схема перемещений земснаряда при разработке прорезей папильонажным способом. Ⅰ - правая кромка прорези; Ⅱ левая кромка прорези. По рисунку видно, что на участке 3-5 ширина папильонажносй ленты начинает увеличиваться, из-за чего возможен пропуск разработки грунта на некоторых участках. На участках реки, где постоянно хорошее течение - для экономии времени кормовые боковые якоря не закладывают, то есть обходятся только носовой становой и носовыми папильонажными лебедками, подобрав нужны угол закладки, для устойчивого положения судна. В случаях действия на судно поперечных сил (ветер, подводные течения), а также при опасности посадки на мель (мелководные участки в близи) помимо двух носовых боковых закладывают якоря двух кормовых боковых лебедок. При работе на участках со слабым течением или отсутствием его, закладывают кормовой становый якорь. Который обеспечивает необходимое натяжение носового станового троса и уменьшает ненужные отклонения земснаряда от установленного курса. При работе расстояние от земснаряда до кормового станового якоря непрерывно изменяется, для этого требуется плавное регулирования кормовой лебедки. Эти требования достигаются при использовании средств автоматики. При налаженном автоматическом регулировании кормовой лебедки, желательно задействовать кормовой становый якорь даже на участках реки с хорошим течением. При работе земснаряда: на малых глубинах за кромкой прорези, в узких участках судового хода, при расширении водоема - для обеспечения высокой производительности, как и в обычных условиях, требуется соблюдать нужный угол разворота корпуса земснаряда относительно направлению движения. Для управления корпусом судна используют кормовые боковые лебедки. В процессе папильонирования работу этих лебедок регулируют согласно с работой носовых боковых лебедок, причем при разных углах положения судна, скорости каждой из боковых лебедок различны и требуют постоянную корректировку. Основное назначение папильонажных лебедок - это обеспечение рабочих перемещений земснаряда по разрабатываемой прорези согласно технологическому режиму. Технологический режим дноуглубительных работ понимается как, взаимосогласованная работа грунтозаборного устройства с его перемещениями по дну разрабатываемой прорези с помощью оперативных лебедок. Бывают остановки в работе, когда оперативные лебедки выполняют отдельные операции, не связанные с технологией дноуглубления: 1) Производственные остановки (переход на другое место работы, перекладка якорей). 2) Периодические остановки (уход земснаряда в сторону с рабочего места при помощи становых и папильонажных лебедок, для пропуска транспортных судов или ремонта и возвращение его на прежнее место). Скорость рабочих перемещений земснарядов напрямую связана с их производительностью по объему извлекаемого грунта. У земснарядов разрабатывающих грунт папильонажным способом производительность м’/час связана со скоростью папильонирования. hc – толщина снимаемого слоя hп – толщина полезно удаляемого слоя грунта lp – подача земснаряда по становому тросу  h – запас на неровность выработки h – запас на неровность выработки Sп – площадь сечения, после прохода земснаряда по папильонажной ленте в одну сторону, выражается произведением: hс * lр = Sр Толщина снимаемого слоя складывается из толщины полезно удаляемого слоя hп и запаса h на неровность выработки: hc = hп + h.Полезно удаляемом слоем hп называются разность верхнего слоя дна, учитывая неровности и уровень проектного дна заданного с поста управления. При этом заданная глубина должна обеспечиваться по всей площади прорези. В границах разрабатываемой прорези (левая кромка-правая кромка) толщина полезно удаляемого слоя hп: изменяется в широком диапазоне. Это зависит от специфичных неровностей дна (бугры, впадины, канавы) и от вида самого грунта. Бывают такие участки реки, где дно обладает большими перепадами в глубине, что приводит к неравномерному захватыванию грунта (где-то достаточно, а где-то черпаки почти не достают). Для компенсация этого эффекта есть такое понятие, как запас на неровность выработки h. Размер этого технологического запаса устанавливается исходя из опыта эксплуатации в разных условиях ( от 0,2-0,5 м). Согласно формуле (1.1) для достижения необходимой производительности земснаряда по объему извлеченного грунта требуется перемещать земснаряд вдоль папильонажной ленты со скоростью, м/мин,  (1.2) (1.2)Изменение полезно удаляемого слоя hп влияет на изменение скорости рабочего перемещения vп. Наибольшая скорость, м/мин, требуется на участках с hп = 0:  (1.3) (1.3)Также должна быть обеспечена максимальная скорость наматывания каната оперативной лебедкой. Для этого при проектировании лебедки должна быть предусмотрена частота вращения барабана в режиме наматывания каната под нагрузкой, об/мин,  (1.4) (1.4)где DБ - диаметр барабана, м; dK – диаметр оперативного каната, м. При продвижении земснаряда папильонжными (боковыми) лебедками в любую из сторон, изменяется угол ведущих канатов(угол = линия тянущего каната — борт судна) и соответственно требуемая скорость лебедок. Поэтому в процессе управления земснарядом, требуется непрерывная корректировка скорости наматывания канатов в связи с изменениями толщины снимаемого слоя и направления каната. 1.2 Папильонажные лебёдки Папильонажными лебедками называются лебедки, назначение которых состоит в поддержании непрерывного контакта грунтозаборного устройства с разрабатываемым грунтом и в осуществлении необходимого напора для механического разрушения его рыхлителем той или иной конструкции. Для сокращения потерь времени на маневрирование земснарядом верхний предел скорости обычно увеличивают в 2 и даже иногда в 3 раза. В основном все же папильонажные лебедки работают на малых скоростях. Так как направление папильонажных тросов, как правило, не совпадает с направлением, в котором должно перемещаться грунтозаборное устройство, то и значения скоростей троса и грунтозаборного устройства будут различными. Тяговое усилие, развиваемое папильонажной лебедкой, должно быть прежде всего достаточным для осуществления процесса резания грунта и преодоления при рабочих перемещениях снаряда всех вредных сопротивлений, в том числе давления ветра и давления текущей воды, так как все эти силы при неудачной комбинации могут складываться. Современная конструкция папильонажных лебедок должна отвечать следующим требованиям: 1) дистанционное регулирование скорости наматывания и сматывания троса должно происходить на всех скоростях достаточно плавно; 2) при высокой надежности и полной безопасности ее обслуживания быть максимально компактной; 3) для обеспечения повышения сроков службы троса быть оборудована тросоукладчиком; 4) быть оборудована автоматически и надежно действующей защитой от перегрузки. 1.3 Требования к электроприводам земснаряда 1.Электроприводы механизмов дноуглубления, рабочих перемещений и обслуживающих устройства отвода грунта должны иметь дистанционное управление из рубки управления и выключатель (аварийный) отключения цепи управления в непосредственной близости от механизма. 2.Схемами управления электроприводами технологического оборудования, за исключением грунтового и промывочного насосов, должно обеспечиваться реверсирование электродвигателей. 3.Все электроприводы должны иметь нулевое блокирование и защиту от перегрузок и токов короткого замыкания. 4.В электроприводах с ограниченным перемещением рабочих устройств должны быть выключатели конечных положений. Электроприводы механизмов дноуглубления и рабочих перемещений необходимо выполнять с учетом следующих требований: 1.плавный пуск при достаточном пусковом моменте; 2.стабилизация заданной частоты вращения в пределах допустимых нагрузок и ограничение момента и потребляемого тока кратковременно допустимым значением тока стоянки Iст= (1,5-1,7)Iн (крутопадающие механическая и электромеханическая характеристики); 3. достаточный диапазон изменения частоты вращения. 4.Скорость навивания троса электроприводов, обеспечивающих папильонирование и продвижение по траншее, регулируется в пределах от 0,15—2 до 10—15 м/мин при номинальном вращающем моменте и достигает 20—25 м/мин с уменьшением его при уходе с прорези (например, для пропуска судов). 5.Скорость движения майонной черпаковой цепи регулируется в пределах от 2 до 25 черпаков/мин; 6.плавное регулирование частоты вращения электроприводов лебедок, обеспечивающих папильо-нирование и продвижение по траншее, черпаковой цепи и механического рыхлителя; 7. регулирование частоты вращения электроприводов механизмов дноуглубления, способствующее достижению наибольшей производительности и наилучшему использованию установленной мощности двигателя; 8. регулирование частоты вращения электроприводов механизмов рабочих перемещений, осуществляемое в функции изменения режимов нагрузки механизмов дноуглубления в целях достижения ими наибольшей производительности; 9.быстродействие систем управления электроприводами; 10.свободное-сматывание троса с барабанов папильонажных и становых лебедок и лебедок концевого понтона 1.4 Анализ существующего электропривода папильонажной лебёдки судна На земснаряде «Портовый – 12» проекта 92 – 034 (Чехословакия), для папильонажной лебёдки установлен электропривод переменного тока с двумя трёхскоростными асинхронными двигателями с короткозамкнутым ротором, планетарным редуктором и электромагнитными тормозами. Свободный ход барабана лебедки обеспечивается фрикционной муфтой. Недостатками этого электропривода является: - ступенчатая регулировка скорости в узком диапазоне - система управления электроприводом осуществляется с помощью электромеханических контакторов и реле которые имеют низкую надёжность из-за множества подвижных деталей. 1.5 Требования к автоматизированному электроприводу оперативных лебёдок Оперативные лебедки относятся к важнейшим рабочим устройствам земснаряда. Ими регулируется производительность земснарядов и обеспечивается последовательность выемки грунта со всей площади углубляемой прорези. Требования, предъявляемые к оперативным лебедкам, перечислены ниже. 1. Создание в оперативном канате тягового усилия, необходимого для преодоления земснарядом сопротивления грунта и действующих на корпус внешних сил, включая реакцию других оперативных канатов, требующихся по технологии производства работ. Расчетное тяговое усилие должно обеспечиваться при наличии на барабане 2/3 полного числа рядов навивки каната. 2. Канатоемкость барабаня должна соответствовать назначению оперативной лебедки, характерным условиям применения земснаряда и предусмотренной проектом технологии производства работ. Наибольшую канатоемкость (от 500 м на малых до 1200 м - на крупных земснарядах) предусматривают у становых лебедок; у боковых лебедок канатоемкость принимают 0,5 от становых. В связи сбольшой длиной каната и навивкой его на барабан в несколько рядов лебедку оборудуют канатоуклядчиком, обеспечивающим упорядоченную укладку каната на барабан при наматывании. 3. Должно быть, сообщение оперативному канату скорости наматывания в требующемся диапазоне до расчетной максимальной скорости на первом ряду навивки каната. Минимальный предел диапазона не должен превышать 5-7 % максимальной скорости. Схемой привода должна обеспечиваться возможность плавного регулирования скорости в указанном диапазоне. 4. Помимо рабочего диапазона, лебедка должна иметь ступень повышенной скорости, которая требуется для быстрого отхода земснаряда с судового хода при пропуске транспортных судов. Тяговое усилие при наматывании каната с повышенной скоростью определяется из условия преодоления действующих на корпус внешних сил (без учета сопротивления грунта). 5. Для перехода с рабочего диапазона на ступень повышенной скорости и обратно применяются местные или дистанционно управляемые устройства переключения передач в редукторах. У отдельных лебедок для этой цели, помимо основного двигателя, включают в работу или отключают дополнительный двигатель. 6. Для обеспечения возможности быстрого сматывания каната с барабана внешней силой (тягой мотозавозни, держащей силой якоря при сплывании земснаряда по течению, при его перемещении движителями или буксировщиком и т.п.) в конструкции лебедок следует предусматривать муфту свободного хода барабана. Желательно дистанционное управление этой муфтой. 7.Сцелью предотвращения излишнего сматывания каната под действием инерции вращающегося барабана устанавливается дистанционно управляемая тормозная муфта барабана. 8. Для исключения неконтролируемого вращения лебедки при выключении ее двигателя должен автоматически включаться тормоз на его валу. Рассмотрение технологии и экспериментальные данные позволяют сформулировать требования к автоматизированному электроприводу оперативных лебедок. Основные требования к автоматизированному электроприводу сводится к следующему: плавный пуск электродвигателя при достаточном пусковом моменте. поддержание постоянства усилия (момента) при сматывании оперативных канатов. - обеспечение стабилизации заданной частоты вращения в пределах допустимых нагрузок. - ограничение момента и потребляемого тока при работе папильонажной лебедки на упор (режим стоянки двигателя под током) кратковременно допустимым значением Мст, принимаемым обычно (1,5-1.7)Мном - реверсирование и торможение необходимые для проведения ремонтных и наладочных работ. - автоматическое стопорение двигателя при исчезновении напряжения. - обеспечение высокого быстродействия и высоко эффективной защиты от перегрузок. - удобство монтажа, наладки и эксплуатации, высокая ремонтоспособность системы. Система автоматизированного электропривода также должна обеспечивать заданною производительность снаряда со сравнительно невысокими удельными затратами на перемещения. Наиболее полное использование установленной мощности во всех практически возможных режимах работы, высокие массогабаритные показатели и компактность, надежная и долговечная работа, эффективная защита от перегрузок. Привод оперативных лебедок в целом должен быть высокоэкономичным, надёжным и долговечным в работе, удобным для обслуживания и ремонта. В электроприводах механизмов рабочих перемещений (кроме движителей) предусматриваются тормозные устройства с электромагнитным, электрогидравлическим или электропневматическим приводом. Папильонажные и становые лебедки оборудуются муфтами свободного вращения барабана. Важным является требование управляемости. "Управляемость” характеризуется способностью объекта реагировать на управляющее воздействие и обеспечивать заданный закон движения, несмотря на воздействие возмущений. В понятие управляемость входит оценка точности управления, плавность, быстродействие и форма переходных процессов, чёткость выполнения команд, формирование желаемых характеристик. Таким образом, папильонажный электропривод является одним из важных частей механизма земснаряда. 1.6 Выбор системы электропривода Имеющийся на земснаряде электропривод, переменного тока с двумя трёхскоростными асинхронными двигателями с короткозамкнутым ротором, папильонажной лебедки, в основном удовлетворяет предъявляемым к нему требованиям, но в настоящее время физически устарел и нуждается в замене на более современный и лучший по своим показателям, электропривод. Наличие целого ряда проектных организаций и многообразие земснарядов, привели к тому, что на действующих земснарядах исполняются самые различные системы электроприводов основных механизмов: - система «генератор – двигатель» с реостатным регулированием цепей возбуждения, с использованием в цепях возбуждения магнитных усилителей и электромашинных усилителей с тиристорными возбудителями; - асинхронный электропривод с электромагнитной муфтой скольжения: - асинхронный электропривод с многоскоростным двигателем с фазным ротором и тиристорным коммутатором: - асинхронный электропривод с асинхронным двигателем с фазным ротором и реостатной схемой управления; - система «тиристорный преобразователь - двигатель постоянного тока» (ТП-Д): - система «преобразователь частоты - асинхронный двигатель с короткозамкнутым ротором» (ПЧ-АД). Разработка системы преобразователь частоты - асинхронный двигатель в настоящее время достигла высокого совершенства. Система ПЧ-АД в настоящее время вытесняет систему ТП-Д, поскольку она обладает значительными преимуществами по сравнению со второй: более высокий КПД, cosφ близкий к единице, лучшая управляемость, более высокая надёжность, минимальные эксплуатационные затраты. Отсюда следует вывод о целесообразности применения системы ПЧ-АД. 1.2 Основные сведения работы АДЧР Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации. Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток). Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости. Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты. Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением  (1.5) (1.5)неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте: При моменте нагрузки, обратно пропорциональном скорости:  (1.7) (1.7)Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя. Преимущества использования регулируемого электропривода в технологических процессах. Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Структура частотного преобразователя Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя. В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Принцип работы преобразователя частоты Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв. Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления. Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя. Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи. 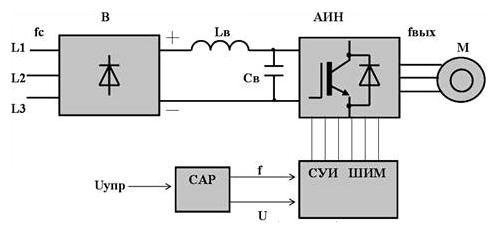 Рисунок 1.2 структурная схема работы преобразователя частоты Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов. Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промоделирована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна. Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const. Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.  Рисунок 1.3 график прямоугольных импульсов Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах. Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6. За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока. 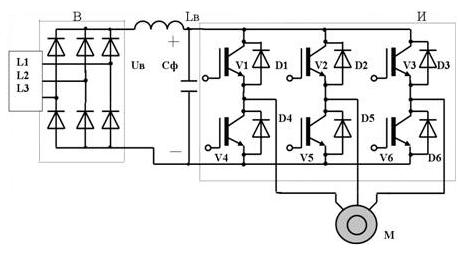 Рисунок 1.4 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах И – трехфазный мостовой инвертор; В – трехфазный мостовой выпрямитель; Сф – конденсатор фильтра; |