Ответы по ЧПУ Мартинов Магистратура. Ответы для подготовки к зачету по ЧПУ. Ответы для подготовки к зачету по дисциплине Программноаппаратная структура современных систем чпу
 Скачать 5.01 Mb. Скачать 5.01 Mb.
|

|
8. Архитектура цифровых следящих приводов подач технологических машин, цифровой следящий привод с асинхронным двигателем, многокоординатное управление и SERCOS интерфейс. 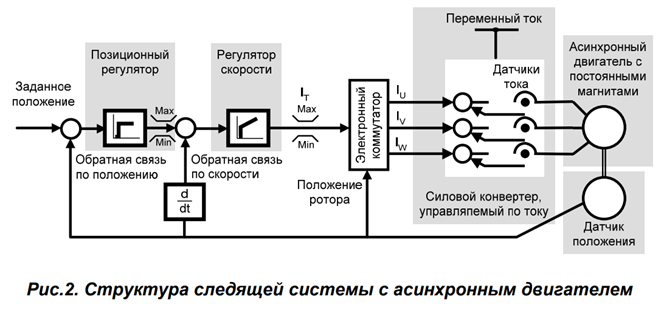 В сравнении с двигателями постоянного тока асинхронные двигатели имеют то бесспорное преимущество, что теплоотдача осуществляется через внешнюю поверхность статора. Постоянные магниты ротора размещают различным способом, что зависит от фирмы-производителя. Материал магнитов варьирует от дешевых керамических до дорогостоящих, с применением редкоземельных материалов. Современный асинхронный двигатель представляет собой прецизионный мехатронный узел, оснащенным многофункциональным поворотным датчиком, который осуществляет электронную коммутацию переменного тока и замыкает скоростной и позиционный контуры обратной связи следящего привода. В качестве таких датчиков используют оптические приборы, резольверы и др. Наилучшим решением является такое, при котором привод с асинхронным двигателем является цифровым, и обработка всех сигналов осуществляется в цифровой форме (рис. 3) 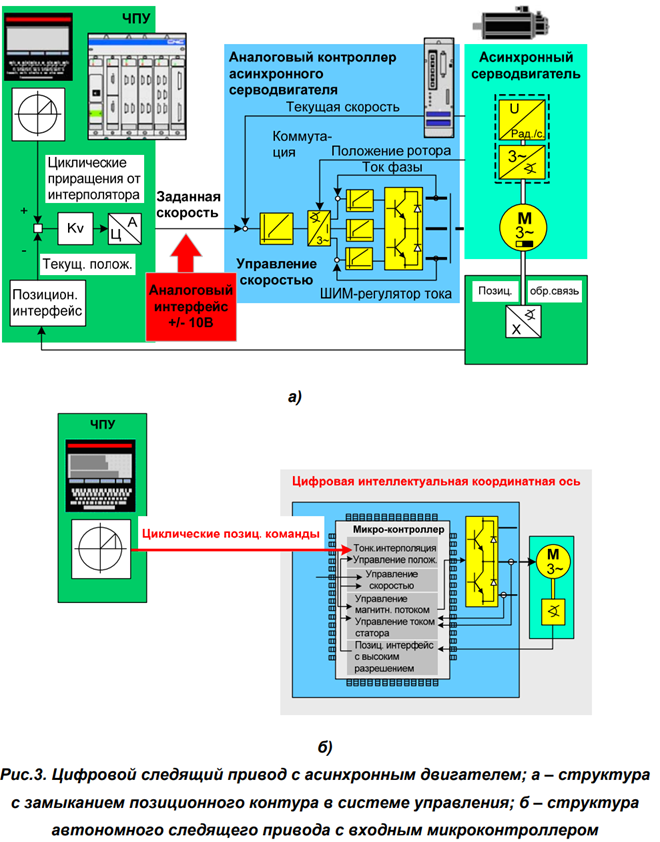 Многокоординатное управление и SECROS интерфейс. Оставалась, однако, проблема многокоординатного управления, поскольку каждый отдельный привод независимо «замыкался» в интерфейсе системы управления (рис. 4). Такое решение было дорогостоящим и сложным в настройке и не имело перспектив достижения высокой долемикронной точности и скорости подачи порядка десятков метров в минуту.  Эволюция привела к созданию интеллектуальных цифровых приводов, обеспечивающих высокие скорость и точность при минимальных затратах. Для их использования оказался необходимым быстродействующий цифровой открытый и стандартный интерфейс, который обеспечивал бы возможность подключения приводов от любых производителей. Всем этим требованиям отвечает SECROS интерфейс (Serial Realtime Communication System) для цифровых следящих приводов он стал международным стандартом IEC 61491 и европейским стандартом EN 61491 для систем ЧПУ. С момента внедрения стандарт был использован во многих тысячах приложений. Каждая координатная ось управляется прецизионно сформированными циклическими командами, генерируемыми интерполятором системы управления (ЧПУ). При этом обеспечиваются высокая точность отдельной оси и совокупная точность интерполируемого движения. Обработка сигналов интеллектуального цифрового привода выполняется при помощи микроконтроллера (рис. 5). Микроконтроллер способен не только осуществлять традиционное управление моментом и скоростью подачи, но и выполнять тонкую интерполяцию и позиционное управление с исключительно коротким вычислительным циклом. В сравнении с традиционными приводами достигается исключительно высокая точность, причем различие особенно заметно при высоких скоростях подачи. Цифровые приводы работают циклически, а циклом является интерполяционный цикл системы ЧПУ. В каждом цикле значения переменных обновляются для каждого привода. 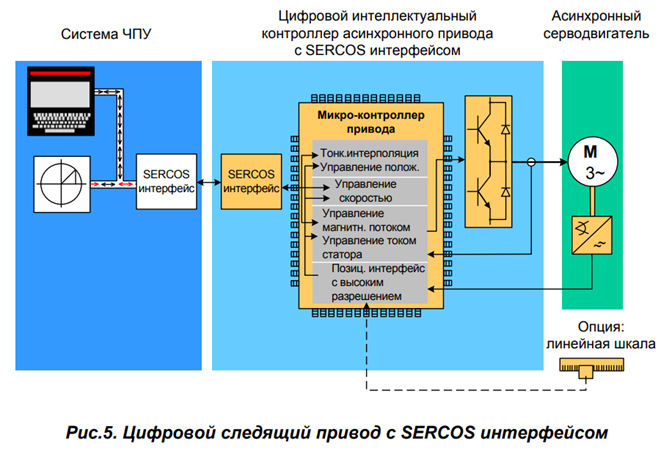 SERCOS_интерфейсом,_топология_«кольцо»,_коммуникация_по_типу_«ведущий_—_ведомый».'>9. Система ЧПУ с SERCOS интерфейсом, топология «кольцо», коммуникация по типу «ведущий — ведомый».  Схема цифровых приводов с асинхронными двигателями и SERCOS интерфейсом. Концевики уже подключены к контроллеру привода, линейка подключена к контроллеру привода. Кол-во кабелей, которые идут к системе ЧПУ стало меньше – 2. SERCOS всегда подключается по топологии «КОЛЬЦО», т.е. выходит из системы ЧПУ, заходит в привод, выходит из привода, заходит в слот и т.д. и замыкается на вход системы ЧПУ. + подключение концевиков, линейки через контроллеры привода всегда лучше, чем загружать этими функциями систему чпу.  *Ведущий – контроллер ЧПУ/плк Ведомый – контроллер привода К системе управления (блок управления) можно одновременно подключить не одно, а 2, 3 кольца. В одно Серкос кольцо можно подключить до 254 ведомых приводов, 255-ый - это Мастер. Для станков норма – 8 приводов на одно Серкос кольцо. Если нужно больше, ставим второе серкос кольцо. Серкос обеспечивает 4 фазы. 1 – аппаратное подключение для определения физической связи, 2 – используются для настройки номеров приводов в сети, 3 – машинные параметры для каждого из приводов, подробные настройки; 4 – циклическая фаза, идет обработка изделия. 10. Коммуникационный цикл взаимодействия, ведущего с ведомым, управляющие телеграммы (MST, AT, MDT). Коммуникация происходит циклически и начинается с так называемого Мастера(Ведущего), (напр. система ЧПУ) рассылает MST телеграмма (Master synchronisation telegram). Дальше каждый привод рапортует о своем состоянии. The axis telegram (AT) от каждого привода. AT содержит рабочие данные привода, например информация о положении (фактическое значение положения). За ним идет новое задание - Master data telegram (MDT). Телеграмма Master data содержит значения команд для приводов. Отправляется телеграмма только с конкретными записями данных для каждого привода. Рабочие данные для приводов можно настроить. Через специальный параметр (список IDN настраиваемых данных в MDT) можно найти какие IDN могут быть записаны в MDT. И далее снова по кругу – MST, AT1,2,3,MDT.  Время между двумя MST называется временем цикла SERCOS (по рис. – 1000). * SERCOS определяет ряд параметров для коммуникационных целей, а также прикладные цели. Уникальный идентификационный номер (IDN) присваивается параметру для определить это. Помимо рабочих данных, также можно считать имя, атрибут, единицу измерения, минимальное и максимальное значение для каждого реализованного IDN. 11. Структура SERCOS телеграмм, настройка привода с помощью цифрового осциллографа, топология построения SERCOS-III. Настройка приводов с помощью осциллографа имеет параметры S (standard parameters, командная позиция куда ехать, актуальная позиция, командная скорость, актуальная скорость) и P (product parameters могут отличаться у каждого производителя, специфичные параметры) Оптимальная настройка регуляторов следящих приводов подачи невозможна без тщательного анализа их динамических характеристик с помощью осциллографа подсистемы диагностики. Особенность распределенной архитектуры осциллографа (рис. 109) состоит в использовании «процесс-СОМ-сервера», в котором собраны все операции над сигналами, независимо от устройства-источника этих сигналов. В числе возможных операций над сигналами и такие, как: масштабирование, сдвиг, практически любые математические вычисления. Виртуальный прибор ActiveX конфигуратора работает в двух режимах: конфигурации измерения и отображения измерительных данных в текстовом формате. Виртуальный прибор ActiveX осциллографа отображает сигналы в графическом виде. ActiveX имеет возможности визуальной настройки свойств - цветов, шрифтов, стилей изображения сигналов. Приложение осциллографа подсистемы диагностики, помимо стандартных процедур конфигурации и отображения измерения, позволяет строить с помощью процесс-сервера амплитудно-частотные и фазочастотные характеристики следящих приводов. 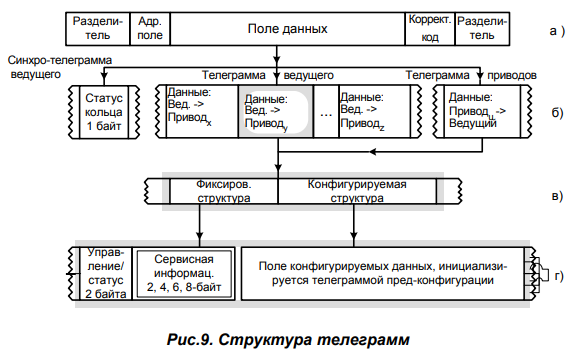   SERCOS-III использует витую пару. С аппаратной избыточностью – получается дублирование сигнала т.е. два кольца. Без избыточной – одинарное кольцо. Синие стрелки – данные идут от ведущего в одну сторону, зеленый – в обратную сторону – т.е. замыкание данных в кольцо. 12. Типовая структура смешанных протоколов SERCOS и Ethernet. Циклическая и нециклическая информация.  Левая схема: Управление приводами – с помощью SERCOS Управление автоматикой – с помощью Etherner Правая схема: В одном SERCOS кольце подключены привода + входы и выходы (только для SERCOS-III)  Телеграмма SERCOS-III. Цикл коммуникации делится на 2 части: - циклическая информация (телеграмма MST, AT, MDT) - нециклическая информация (IP-канал (TCP/IP, UDP/IP) (любая информация, которая может идти) SERCOS-III всегда сначала обеспечивает циклическую информацию и время, которое не занятое от циклической информации отдается на IP-канал, т.е. нециклический канал всегда передает данные по остаточному принципу. 13. Эволюция коммуникационной системы. Характеристики SoftSERCANS. Левый фрагмент: Сначала была нестандартная аппаратура ЧПУ. Есть микропроцессор (µP) сверху на рисунке. Есть специальный чип SERCON, который реализовывал работу SERCOSа. Функции SERCOSа ведущего реализовывались с помощью нестандартной аппаратуры системы ЧПУ, поэтому нужно было делать специализированные материнские платы (это очень дорого, прям очень дорого). Центральный фрагмент: Решением проблемы стала стандартная материнская плата и нестандартная плата расширения DPR – разделяемая память (шерид мемори) Вся аппаратура, которая была связана с управление SERCOS) шины (работа с оптоволокном) была вынесена в специальную карту расширения. Покупалась PC карта и в неё вставлялась SERCONc карточка. В данном случае функции ведущего выполняла активная карта (активная, потому что у неё свой микропроцессор). Сделать карту расширений гораздо легче и дешевле чем специализированную материнскую плату. Обмен через двухпортовую память (шерид мемори) – между компьютером и SERCONсом. Правый фрагмент: Со временем, мощность процессора стала увеличиваться, и она смогла справляться помимо задач реального времени ещё и с функциями SERCOS ведущего. И появилась пассивная SERCOS карточка – SoftSERCANS, которая выполняет функции ведущего. То есть используется стандартная аппаратура системы ЧПУ (стандартный компьютер). В него вставляется пассивная карта ведущего, у которой нет микропроцессора. Все функции по расчёту осуществляет основной процессор компьютера. 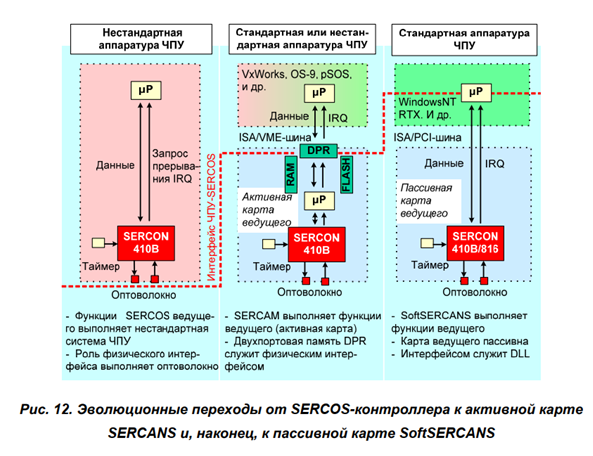 Красной линией на рисунке отмечено разделение интерфейса ЧПУ-CERCOS. Так же добавилась PCI шина. 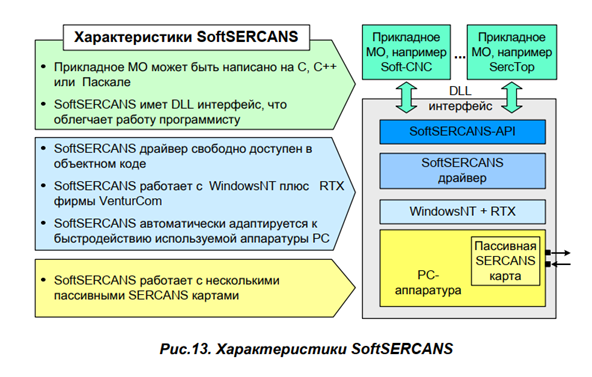 Каждая характеристика слева относится к определенным объектам справа по цвету. 14. Классификация систем ЧПУ, архитектурные модели (CNC, PCNC-1, PCNC-2, PCNC-3, PCNC-4). Классические системы CNC (первый вариант) не имели гибкий интерфейс до сих пор выпускаются лишь фирмами с богатой традицией производства высококачественной собственной микроэлектронной аппаратуры. Но и эти фирмы под давлением конечных пользователей, желающих иметь гибкий интерфейс оператора, предлагают модификацию с персональным компьютером в качестве терминала (второй вариант). По многим причинам первые системы типа PCNC относились к двухкомпьютерной архитектуре (третий вариант); они и сегодня очень популярны и наиболее широко распространены. Несколько позднее появились системы PCNC, ядро которых реализовано на отдельной плате, устанавливаемой в корпусе промышленного персонального компьютера (четвёртый вариант). Наконец, по мере повышения мощности микропроцессоров все больше распространение получает однокомпьютерный вариант системы PCNC (пятый). 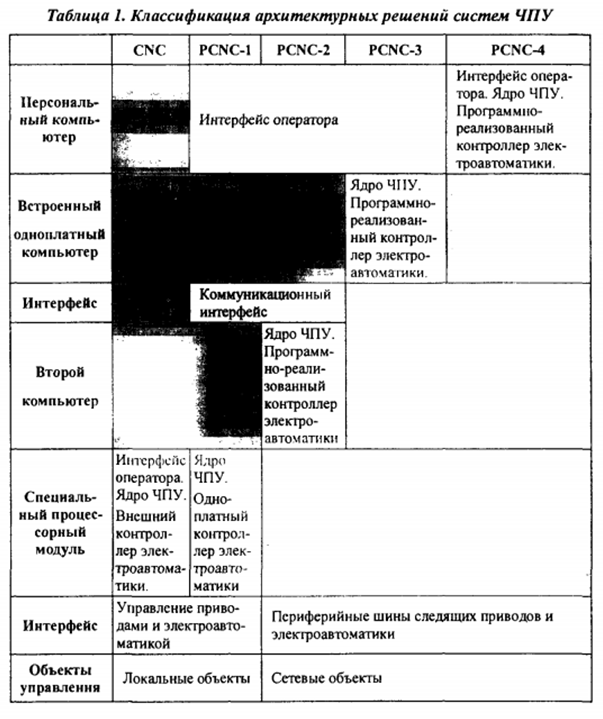 Классификация систем ЧПУ 15. Системы CNC и PCNC-1. Формально системы ЧПУ классифицируются по их архитектуре, в зависимости от того сколько компьютеров там есть: Изначально была система ЧПУ (CNC) которая использовала специальный процессорный модуль. Это предполагало, что разработчики системы ЧПУ используют собственные аппаратные решения и специально разработанное программное обеспечение. В этом случае интерфейс оператора, ядро системы ЧПУ располагались в специальном процессорном модуле, также использовался внешний контроллер электроавтоматики. Эти системы использовали свои собственные интерфейсы управления приводов и электроавтоматики. Объектами управления являлись локальные объекты. Подобная разработка и использование собственных технологий обходились очень дорого. С появлением персональных компьютеров, было решено в целях удобства и экономии перенести работу с интерфейсом на них, так появились системы PCNC-1. В них интерфейс оператора из специального модуля был перенесён на ПК, специальный процессорный модуль при этом остался, он содержал ядро ЧПУ и одноплатный контроллер электроавтоматики. Также появился коммуникационный интерфейс, который связывал ПК (интерфейс оператора на нем) со специальным процессорным модулем. Остальные же части системы остались без изменений. Семейство систем фирмы NUM (Франция, в составе концерна Schneider, Германия) построено по принципу многопроцессорных CNC-систем, т.е. с ЧПУ-процессором, процессором программируемого контроллера автоматики и графическим процессором (рис. 1). Система NUM может быть оснащена пассивным терминалом или промышленным компьютером с операционной системой Windows 98. Семейство представлено компактными, а также и модульными версиями, которые различаются числом координат (и возможностью формировать независимые каналы ЧПУ из координатных групп), использованием традиционных аналоговых или автономных цифровых следящих приводов, подключенных к оптоволоконной сети, а также числом входов-выходов электроавтоматики и использованием удаленных (сетевых) входов-выходов.  Фирма Allen Bradley в составе концерна Rockwell (США) выпускает широкое семейство систем ЧПУ: от традиционной CNC (модель 9/440) до систем CNC с персональным компьютером в качестве терминала (модель 9/260(290)) и систем класса PCNC (модель 9/РС). Последняя модель (рис. 2) выполнена по вполне классической схеме: специализированный промышленный компьютер с Windows NT операционной системой и возможностью разрабатывать пользовательские приложения на Visual Basic (функции прикладного интерфейса API опубликованы); PCI - одноплатный ЧПУ-3 компьютер, выполняющий все функции ядра, включая программно-реализованный контроллер электроавтоматики. Программирование и редактирование контроллера осуществляются через общий для всей системы терминал. Программируемый контроллер имеет собственную сеть (и сетевую плату).  16. Системы PCNC-2. К этому классу принадлежат системы фирм ANDRON и BoschRexroth(Германия). Система ЧПУ фирмы ANDRON относится к полному двухкомпьютерному варианту. Ее структура представлена на рис. 3 в виде набора модулей: терминального компьютера, ЧПУ-компьютера, панели оператора и монитора, удаленных входов-выходов программируемого контроллера, одной или нескольких групп цифровых (SERCOS) приводов подачи и главного привода. В состав терминального компьютера входят: материнская плата с Celeron-процессором и интегрированными контроллерами SCSI, VGA, TFT, IDE; многофункциональная интерфейсная плата MFA с памятью CMOSROM (связь с внешним модемом; транспьютерный контроллер коммуникационного канала, связывающего терминальный и ЧПУ-компьютеры). Все платы установлены на пассивной ISA-шине, при этом предусмотрена установка дополнительных (по заказу) резервных плат: внутреннего модема, сетевой платы, SCSI-платы. Для специальных задач возможна установка PCI-плат. В состав ЧПУ-компьютера входят: материнская плата с Celeron-процессором; плата МЮ (Main Input-Output) поддержки как коммуникационного интерфейса с терминальным компьютером (со скоростью 10 Мбит/с), так и интерфейса маховичка ручного перемещения; плата программируемого контроллера с интерфейсом InterBus-S (с циклом 4 мс для 1024 входов-выходов); одна или несколько плат SERCOS-интерфейса (с микросхемой SERCON410-В). Все платы установлены на пассивной ISA-шине. Каждый SERCOS-интерфейс обслуживает (с периодичностью 0,5 мс) одну группу из трех автономных приводов подачи и одного привода шпинделя. Приводы одной группы включены в кольцевую оптоволоконную сеть. В платформе системы ЧПУ фирмы ANDRON аппаратный уровень расположен под операционной системой Windows NT в терминальном компьютере и оригинальной операционной системой реального времени в ЧПУ компьютере. На прикладном уровне терминальный компьютер открыт для разнообразных приложений и специальных диалогов конечного пользователя, которые e можно назвать САМ-приложениями. Для построения САМ- приложений предусмотрен инструментальный язык ANLOG-C, обеспечивающий доступ к функциям ядра в ЧПУ-компьютере. 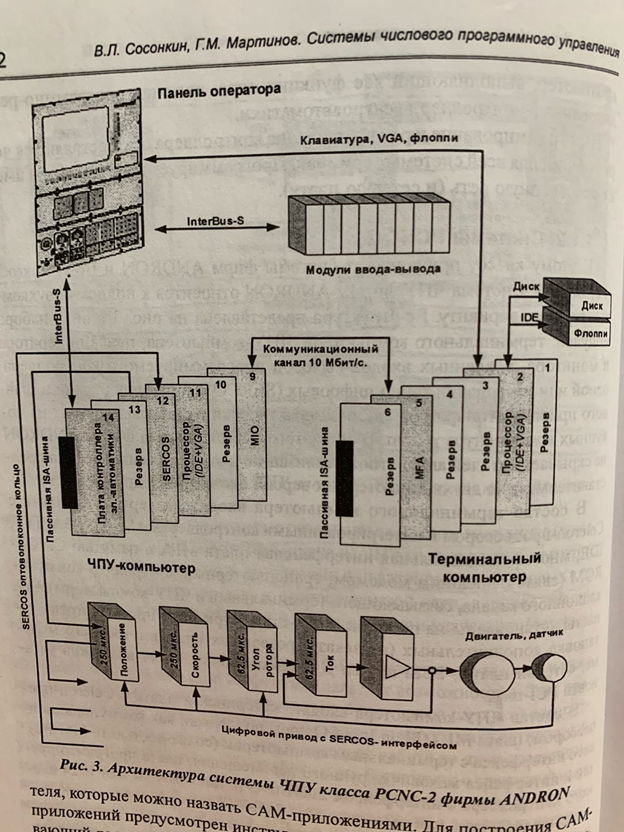 Система ЧПУ фирмы BoschRexroth построена на основе двух высокопроизводительных компьютеров (классический двухкомпьютерный вариант) и обладает исключительно мощным набором функций рис 4). Терминальный компьютер имеет операционную системуWindows NT, а ЧПУ-компьютер - операционную систему UNIX. Связь операционных сред осуществляется с помощью протоколов TCP/IP, что допускает удаленное размещение терминала и работу нескольких терминалов с одним ЧПУ-компьютером. В свою очередь ЧПУ-компьютер предполагает многоканальную работу более чем с одной управляющей программой. Прикладное математическое обеспечение терминального компьютера и прикладное математическое обеспечение ядра в ЧПУ-компьютере окружены оболочкой из нескольких сот интерфейсных API-функций (Application Programming Interface), которые предоставляют конечным пользователям возможность разрабатывать собственные приложения и расширения. В оболочку терминального компьютера включена мощная DLL-библиотека NCS (Numerical Control System) классов объектов, «покрывающая» API-функции, делающая разработку дополнительных приложений более простой и комфортной. В остальном состав прикладного математического обеспечения традиционен; впрочем, можно отметить хорошо проработанный программно-реализованный контроллер электроавтоматики и несколько очень интересных приложений. Среди них - отладчик высокоуровневых управляющих программ, логический анализатор для удаленного контроля программируемых контролеров, осциллограф для анализа динамики следящего привода, в том числе и с помощью рассчитываемых здесь же частотных характеристик.  |