Ответы по ЧПУ Мартинов Магистратура. Ответы для подготовки к зачету по ЧПУ. Ответы для подготовки к зачету по дисциплине Программноаппаратная структура современных систем чпу
 Скачать 5.01 Mb. Скачать 5.01 Mb.
|

|
17. Система PCNC-3. Типичным представителем систем этого класса является система фирмы DeltaTau (Великобритания). Она относится к двухкомпьютерному варианту, но такому, при котором ЧПУ-компьютер выполнен в виде отдельной платы РМАС (Programmable Multi-Axes Controller), устанавливаемой на ISA (или РС1)-шине терминального персонального компьютера (рис. 5). Терминальный компьютер с Windows NT операционной системой выполняет классические функции терминальной задачи и функции интерпретатора управляющих программ. Одноплатный ЧПУ-компьютер РМАС (процессор Motorola 56300) решает геометрическую и логическую задачи [2, 3], выполняя функции интерполятора, контроллера управления приводами (подачи и шпинделя), программно-реализованного контроллера электроавтоматики. Интерполятор обеспечивает все виды интерполяции (включая сплайновую), разгоны и торможения, опережающий просмотр кадров Look Ahead, циклическое формирование управляющих воздействий с периодом 440 мкс (в этом же периоде в фоновом режиме работает и контроллер электроавтоматики). Контроллер приводов способен управлять 32 координатными осями, сгруппированными в 16 координатных систем; он принимает сигналы позиционных датчиков обратной связи, замыкает позиционные контуры, выполняет функции ПИД-регулятора, имитирует в цифровом виде сигналы обратной связи по скорости, вырабатывает (в цифровом виде) широтно-импульсный сигнал для приводов подачи и сигнал ±10В для привода главного движения. Программно-реализованный контроллер электроавтоматики поддерживает параллельное управление 64 циклами электроавтоматики.  Выходные сигналы (для управления приводами и электроавтоматикой) поступают в кольцевой оптоволоконный канал (со скоростью передачи данных 125 Мбит/с) для дистанционного управления своими объектами. Принимающим устройством служит интеллектуальный периферийный терминал Macro-станция (Motion and Control Ring Optical). Допустимо включение в кольцо нескольких таких терминалов. Терминал замыкает скоростные контуры восьми приводов и принимает сигналы ограничителей рабочей зоны и датчиков нулевых точек координатных систем (в блоках ACS), формирует сигналы управления двигателями любого типа (асинхронными, постоянного тока и др.) с помощью блока Quad Amplifier (для управления четырьмя двигателями общей мощностью до 25 кВт). Другая функция периферийного терминала - управление электроавтоматикой через модули оптоизолированных входов-выходов. Набор модулей фирмы DeltaTau (PMAC и Macro) ориентирован на построение собственных систем ЧПУ у конечных пользователей, на долю которых остается разработка терминальной задачи, и интерпретатора в среде промышленного персонального компьютера. Однако сами модули являются для конечного пользователя «черными ящиками» и их архитектура закрыта. 18. Система PCNC-4. Система ЧПУ фирмы Beckhoff демонстрирует яркий пример чисто однокомьютерной архитектуры PCNC, в рамках которой все задачи управления (геометрическая, логическая, терминальная) решены чисто программным путем, без какой-либо дополнительной аппаратной поддержки. У beckoff: есть локальная шина lightbus (кольцевой канал для передачи сигналов управления следящими приводами и сигналов электроавтоматики), элементы реального времени (сервер контроллера электроавтоматики и сервер СЧПУ), системный менеджер (обеспечивает систему реального времени). Это комбинация WindowsNT (для поддержания процессов машинного времени) и TwinCat (функции реального времени). Перемещение данных и доступ осуществляются через программную шину ADS. Системный менеджер, являющийся подсистемой TwinCat, служит центром системной конфигурации, поддерживающим синхронное или асинхронное взаимодействие всех процессов, а также ввод-вывод сигналов управления. На прикладном уровне в потоках управления работают программные модули ЧПУ и программируемые контроллеры, имеющие клиентскую (для подготовки данных) и серверную (для работы в реальном времени) части. ЧПУ-клиент интерпретирует кадры управляющей программы. а ЧПУ-сервер выполняет интерполяцию в группах приводов - по три координаты в группе. Группы формируются системным менеджером. Для безэквидистантных программ можно обойтись без интерпретации, которую заменяет компилятор клиента контроллера автоматики. Одновременно работают до четырех контроллеров (виртуальных процессоров, выполненных в стандарте IEC 1131-3), каждый из которых решает четыре задачи, имеющих свой приоритет и свое время цикла. Поверх есть программная среда (контроллеры электроавтоматики и клиент ЧПУ сделанные в виде ActiveX компонентов (программный визуальный компонент windows, позволяющий отображать информацию). Помимо этого, имеются visual basic приложения (контейнер интерфейса оператора). Так же есть дополнительная граф. станция, позволяющая готовить УП. Всё это реализовано в рамках одного компьютера. У power automation: В промышленном компьютере есть своя память, процессор, ОС windows NT с расширением реального времени, ядро СЧПУ, интерфейс оператора, файловая система, программно-реализованный контроллер автоматики (soft plc), коммуникация идёт через разделяемую память. Для общения с приводами есть PCI-Sercos карта. Эта карта позволяет управлять стандартной Sercos шиной и специальной Super шиной с возможностью управлять через аналоговый интерфейс (+-10В). Так же в пк есть слоты расширения. Операционная система Windows NT поддерживает работу интерфейса оператора, в том числе системы программирования ЧПУ и контроллера электроавтоматики, встроенную САМ-систему (опирающуюся на базы данных инструментов, материалов и технологических циклов), приложения конечного пользователя. Ядро реального времени синхронизирует задачи ЧПУ с электроавтоматикой, диспетчеризует работу интерпретатора, интерполятора и модуля управления следящими приводами. Одновременно могут работать до восьми каналов ЧПУ и два программно-реализованных контроллера электроавтоматики с разными приоритетами.  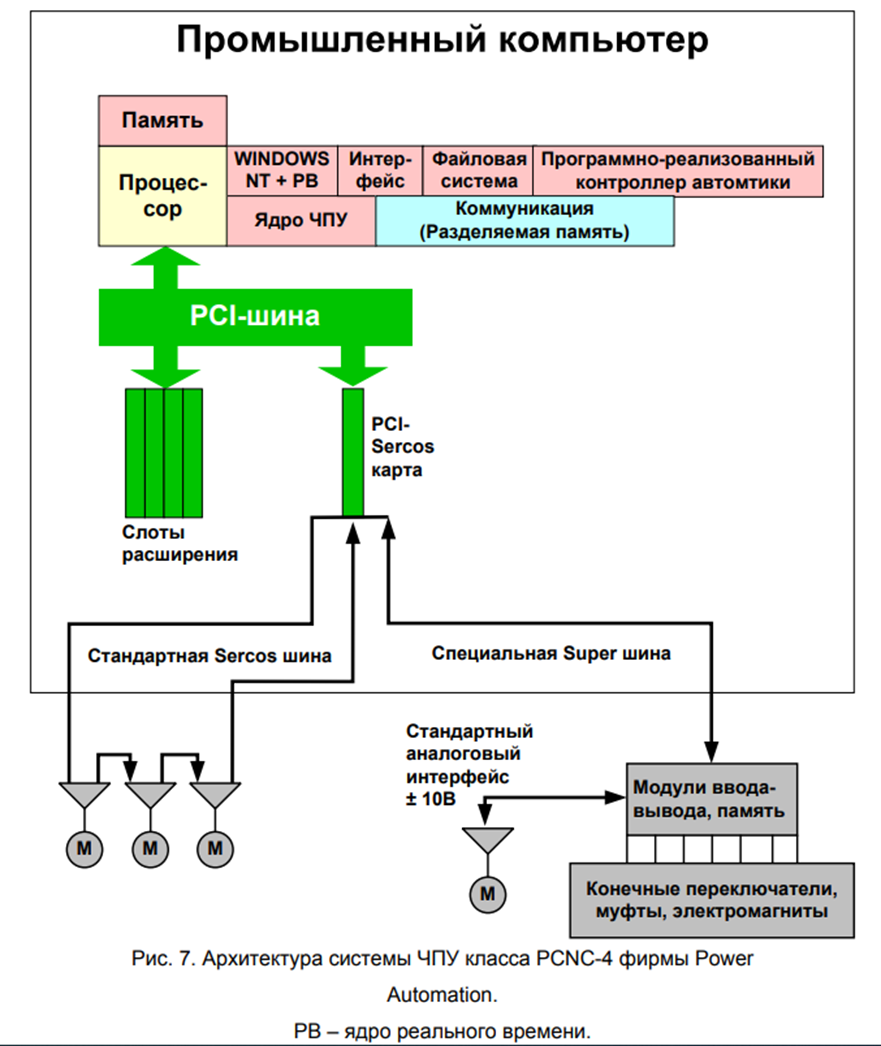 19. Открытая архитектура системы ЧПУ класса PCNC (одно и двух- компьютерная модель), модель PCNC по типу виртуальной машины. Двухкомпьютерная модель Гибкие и сложные системы ЧПУ с открытой архитектурой выполняют согласно двухкомпьютерной архитектурной модели.  Размещение: РС-подсистемы на одном компьютере, а NC-подсистемы - на другом. ОС: РС-подсистеме наиболее целесообразна операционная система Windows NT, а в NC-подсистеме - операционная система реального времени UNIX (Обе операционные системы совместимы в том смысле, что поддерживают коммуникационные протоколы TCP/IP. Это позволяет построить коммуникационную среду, объединяющую подсистемы). Дополнительно: Включение в эту среду прикладного уровня с функциями доступа к интерфейсам модулей: • создает виртуальную шину, оказывающую низкоуровневые услуги доступа. • объектная надстройка в шине формирует глобальный сервер, т.е. единую для обеих подсистем объектно-ориентированную магистраль. Однокомпьютерная модель. По мере роста вычислительной мощности компьютеров все более привлекательным становится однокомпьютерный вариант.  Cуть: использование традиционного компьютера, оснащенного дополнительными контроллерами для связи с мехатронными объектами управления. Контроллер: могут быть контроллер следящих приводов, программируемый контроллер PLC (Programmable Logic Controller), специальные устройства для управления технологическими процессами и др. ОС: может быть использована система Windows NT, которая, не является системой реального времени, поэтому требуется расширения в виде системы RTX 4.1 американской фирмы VentureCom. Система RTX: модифицирует слой HAL (Hardware Abstraction Layer) операционной системы Windows NT и дополняет его диспетчером потоков (threads) реального времени. Диспетчер изолирует прерывания, позволяя строить приложения реального времени. Подсистема реального времени RTSS: выполняет собственные функции и осуществляет управление ресурсами RTX. Подсистема реализована в виде драйвера Windows NT, служит дополнением к операционной системе и использует сервисы Windows NT и HAL для работы подсистемы реального времени отдельно от любых других приложений. Другие компоненты: ядро и драйверы Windows NT. Дополнительно: На интерфейсном уровне прикладные программные интерфейсы Win32 и RTX похожи; в них реализованы функции, необходимые соответственно для создания обычных приложений и приложений реального времени. Разработанную с использованием RTX программу можно отлаживать и запускать также в среде Win32. Однако в RTX есть функции, не имеющие аналогов в Win32, например функции работы с прерываниями. Модель PCNC по типу виртуальной машины 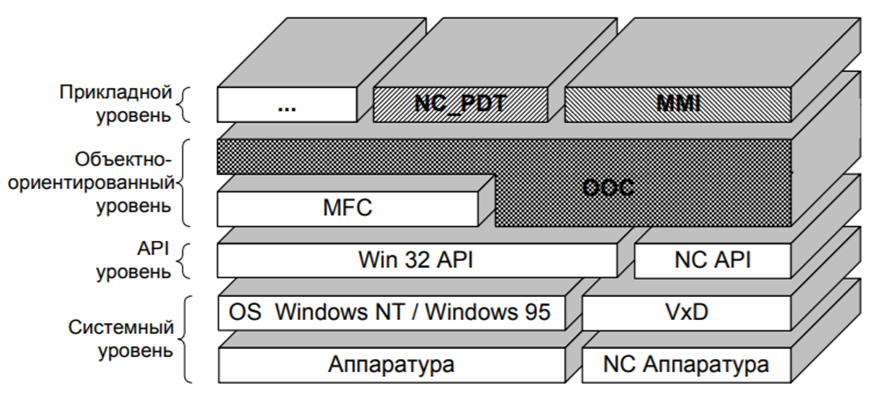 Нижний уровень составляет компьютерная аппаратура, выше размещается операционная система Windows NT вместе с драйверами виртуальных устройств (VxD), обеспечивающими управление внешними устройствами, например контроллером панели оператора. Доступ к операционной системе и ее службам осуществляется посредством API-слоя (прикладной интерфейс), который поддержан Win32-функциями и NC-функциями, обеспечивающими вход в подсистемы Windows NT и NC. Функции реализованы в виде DLL (библиотека с динамическим связыванием). Поверх API-слоя расположен объектно-ориентированный сервер, служащий фундаментом для приложений в системе PCNC. Классы объектов: стандартные из библиотеки MFC (Microsoft Foundation Classes), а также специально разработанные классы OOC_CL объектно-ориентированной магистрали ООС (Object Oriented Channel). Сервер: содержит для всех приложений алгоритмы, такие как: обработчики ошибок, средства форматирования и конвертирования данных, управляющие элементы многооконного экрана и др. На прикладном уровне размещаются разнообразные приложения: интерфейс пользователя MMI (Man Machine Interface), инструмент разработки и верификации управляющих программ NCPDT (NC Program Data Tool) и др. Основным признакам СЧПУ нового поколения для мехатронных систем являются принадлежность к классу персональных систем равления PCNC и использование принципов открытой архитектуры. Открытая архитектура предполагает: • исключительную гибкость (конфигурируемость) системы. • использование клиент-серверного подхода в организации транзакций. • привлечение объектно-ориентированного подхода к определению макроструктуры, а также на уровне технологии программирования. 20. Модульная архитектура системы ЧПУ типа PCNC и задачи управления. Архитектура на прикладном уровне определяется количеством и составом прикладных разделов, называемых задачами управления. В числе подобных задач: • геометрическую, ориентированную на управление следящими приводами; • логическую, организующую управление электроавтоматикой; • технологическую, гарантирующую поддержание или оптимизацию параметров технологического процесса; • диспетчеризации, обеспечивающую управление другими задачами на прикладном уровне; • терминальную, поддерживающую диалог с оператором, отображение состояний системы, редактирование и верификацию управляющих программ. 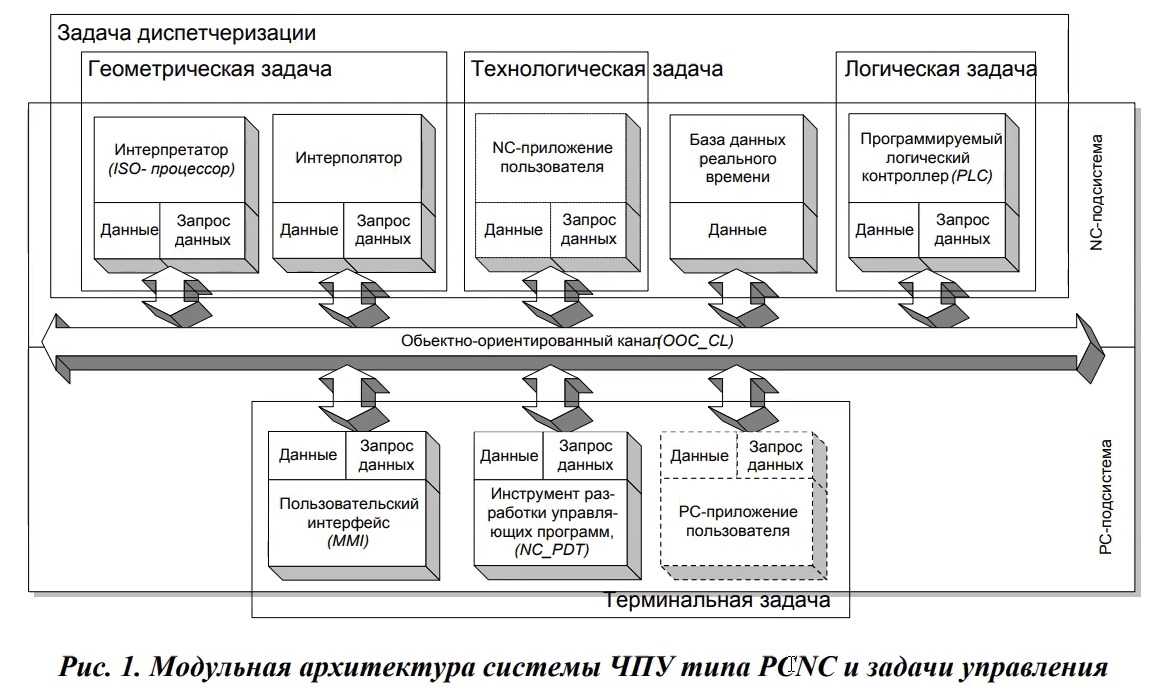 Структура системы ЧПУ представляет собой совокупность базовых модулей (обведены сплошными линиями) и дополнительных модулей (обведены пунктирными линиями). Модули закреплены за задачами управления. К дополнительным модулям отнесены коммерческие приложения. Модуль автономен и является вложенным объектом: он располагает собственными алгоритмической структурой, структурой данных и интерфейсной оболочкой для работы в клиент-серверной среде. Общая структура представлена NC-подсистемой (Numerical Control) и РС-подсистемой (Personal Computer). Первая формирует среду для ЧПУ ориентированных модулей, работающих в реальном времени, и (возможно) для специальных приложений пользователя. Вторая подсистема образует среду Windows-образного интерфейса пользователя и включает инструментальную систему подготовки и тестирования управляющих программ, а также (возможно) другие специальные приложения. Взаимодействие модулей осуществляется посредством программной объектно-ориентированной магистрали, которая не только поддерживает коммуникационные протоколы, но и выполняет серверные функции. Это значит, что магистраль является глобальным механизмом предоставления модулям информационных услуг. Такая возможность отражена и в самих интерфейсах модулей: они могут предоставлять данные, запрашивать данные, управлять состояниями других модулей. Запрос данных осуществляется синхронным, асинхронным способами или по событию. Выбор механизма запроса зависит от конкретной задачи. При синхронном запросе клиент (модуль, осуществляющий запрос) останавливается в точке запроса и ждет до истечения тайм-аута ответа от сервера (модуля, обслуживающего запрос). При асинхронном запросе клиент продолжает свою работу, а обработка ответа, независимо от времени его получения, выполняется специальной функцией (callback-функцией); ее работа напоминает механизм обработки прерывания. Запрос по событию (синхронный, асинхронный) означает, что ответ будет получен только после изменения данных. Данная структура, обозначает набор модулей, позволяет специфицировать их интерфейсы, выявляет типы запросов, помогает составить техническое задание на объектно-ориентированную магистраль. ИЗ ЛЕКЦИИ NC-подсистема – это ядро машина реального времени, РС-подсистема – это не реальное время, а машинное (терминальная часть). Ключевые задачи: Основная задача – геометрическая, которая отвечает за формообразование, т.е. те формы, которые получаются после обработки в реальном времени; Логическая задача – это управление электроавтоматикой (пускатели, подключение сож, механизм смены инструмента и тд.); Технологическая задача может присутствовать, а может отсутствовать – это зависит от конкретного станка, т.е. что конкретный станок может сделать, либо какие функции у него есть; Терминальная задача – это интерфейс оператора, инструменты для разработки УП (ShopMill, продвинутые редакторы УП), в рамках этой задачи можно так же установить РС-приложения (TeamViewer или калькулятор). Помним, что это ПК не реального времени; В NC-подсистеме используется система реального времени, в том числе – геометрическая задача (интерполятор и интерпретатор). |