Типовое задание № 1. Петербургский государственный университет путей сообщения Императора Александра I (фгбоу во пгупс) Кафедра "Электрическая тяга" Типовое задание 1 Принципиальная схема силовой цепи и функциональная схема системы автоматического управления
 Скачать 0.83 Mb. Скачать 0.83 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования «Петербургский государственный университет путей сообщения Императора Александра I» (ФГБОУ ВО ПГУПС) Кафедра "Электрическая тяга" Типовое задание №1 «Принципиальная схема силовой цепи и функциональная схема системы автоматического управления» Вариант 22 Выполнил обучающийся Курс 5 Группа ПС-704 Бурдейный Н.А.  подпись, дата Принял Викулов И.П. подпись, дата Принял Викулов И.П.подпись, дата Санкт-Петербург 2021  1. Общие положенияОсновные задачи проектирования Цель проектирования – практическое изучение элементной базы, принципов построения систем автоматического управления (САУ), переходных процессов в силовых цепях современного электроподвижного состава на примере расчета и компьютерного моделирования системы автоматического управления тяговыми электродвигателями (ТЭД) электровоза переменного тока. Основными задачами проектирования являются расчет статических и динамических параметров элементов контура регулирования тока ТЭД, расчет параметров элементов компьютерной модели силовой цепи и системы автоматического управления, моделирование переходных процессов в силовой цепи электровоза переменного тока 2ЭС5К или ЭП1. Для выполнения этих задач необходимо: – изучить расчётную схему электрических цепей, функциональную и структурную схемы контура регулирования тока тяговых электродвигателей (ТЭД) и микропроцессорной системы автоматического управления; – выполнить расчет динамических параметров элементов контура регулирования тока ТЭД и параметров настройки регулятора тока ТЭД; – рассчитать параметры элементов и произвести настройку компьютерной модели САУ тяговыми электродвигателями. – выполнить расчет переходных процессов в силовых цепях проектируемой САУ для режима пуска электровоза и при возмущающем ступенчатом воздействии изменения уровня напряжения контактной сети. 2. Принципиальная схема силовой цепи и функциональная схема системы автоматического управленияГрузовой четырехосный электровоз 2ЭС5К оборудован двумя 4-х зонными тиристорными выпрямительно-инверторными преобразователями (ВИП). Эти преобразователи осуществляют регулирование напряжения, подводимого к ТЭД в режимах тяги и электрического рекуперативного торможения. Микропроцессорная система автоматического управления (МПСУ) осуществляет управление выпрямительно-инверторными преобразователями, регулирование тока ТЭД и скорости движения электровоза. Упрощенная принципиальная схема силовых электрических цепей тяговых электродвигателей секции электровоза 2ЭС5К, питающихся от одного ВИП, и функциональная схема контура регулирования тока ТЭД микропроцессорной системы управления для режима тяги показаны на рис. 1. Контур автоматического регулирования скорости движения в работе не рассматривается. Схема силовых цепей и САУ тяговыми электродвигателями электровоза 2ЭС5К аналогична схеме, приведенной на рисунке 1. На схеме обозначены переменные: iя, iв – токи якорей и возбуждения ТЭД; ud , id - выходное напряжение и выпрямленный ток нагрузки ВИП; Uкс, U2 – напряжение контактной сети и тяговой обмотки трансформатора; uдт , iдт – выходной и масштабированный сигналы датчиков тока ТЭД; Cр – выходная числовая переменная регулятора тока РТЯ; tр, αр – переменные временные и фазовые интервалы отпирания тиристоров ВИП; α0, α0з постоянные фазовые интервалы отпирания тиристоров ВИП; uси – импульсы синхронизации модулей МПСУ. В тяговом режиме стабилизация тока тяговых электродвигателей на заданной уставке Iуст осуществляется регулятором тока якорей (РТЯ) микропроцессорной системы управления, обеспечивающей зонно-фазовое регулирование углов отпирания αр тиристорных плеч ВИП. Расширение диапазона регулирования достигается применением ступеней ослабления возбуждения ТЭД. В рамках выполняемого курсового проекта применены две ступени, включаемые посредством контакторов КВ1 – КВ4. 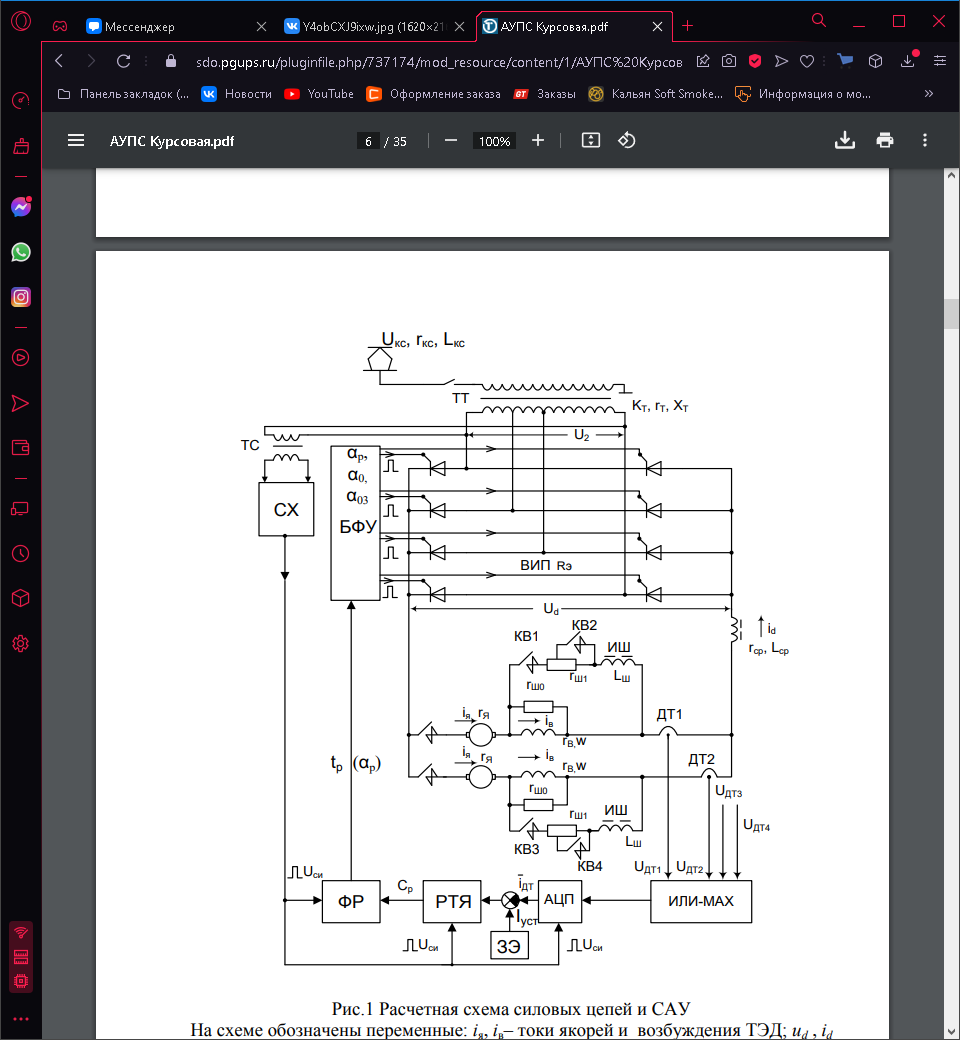 Рис.1. Расчетная схема силовых цепей и САУ На схеме обозначены: iя, iв– токи якорей и возбуждения ТЭД; ud , id - выходное напряжение и выпрямленный ток нагрузки ВИП; Uкс, U2 – напряжение контактной сети и тяговой обмотки трансформатора; uдт1 -uдт4, – выходные сигналы датчиков тока ТЭД; iдт –масштабированный сигнал датчиков тока ТЭД; Cр - выходная цифровая переменная регулятора тока РТЯ; tр, αр–временные и фазовые интервалы отпирания тиристоров ВИП; uси – импульсы синхронизации модулей МПСУ. Уставка тока Iуст тяговых электродвигателей задается потенциометром задающего элемента (ЗЭ) посредством поворота рукоятки контроллера машиниста. Измерение токовякорей осуществляется датчиками токаДТ1 - ДТ4, установленными в цепи каждого ТЭД. Модуль «ИЛИ-MAX» САУ выделяет из сигналов всех датчиков тока наибольшийпо уровню. Выходные сигналы датчиков тока периодически многократно преобразуются аналого-цифровыми преобразователями (АЦП) в цифровые величины на интервале каждой полуволны напряжения тяговой обмотки трансформатора. Интервал полуволны напряжения называют периодом управленияМПСУ (τу = 0,01с). Функциональная схема САУ контура регулирования тока ТЭД электровозов для тягового режима показана на рис.2.  Рис.2.Функциональная схема контура регулирования тока ТЭД. В микропроцессорной системе управления производится масштабированиецифровых сигналов датчиков тока uдт в величины iдт, кратные действительнымзначениям токов тяговых электродвигателей iя. Блок-программа числовой обработки сигналов датчика тока производит вычисление среднего значения сигнала iдт по окончанию каждой полуволны напряжения тяговой обмотки трансформатора. Блок-программа регуляторатока якорей (РТЯ) ТЭД производит каждый период управления вычисление числовой переменной Ср с заданным законом регулирования по сигналу рассогласования(Iуст - i дт ). Числовая переменная Ср передается в таймер-фазорегулятор (ФР). Включение контакторов КВ1 – КВ4 ступеней ослабления возбужденияпроизводится автоматически на 4-й зонерегулирования при снижении углов регулирования ВИП до минимальной величины αрmin. Вывод: В типовой задаче № 1 была разработана принципиальная и функциональная схема САУ контура регулирования ТЭД микропроцессорной системы автоматического управления (рис.1) с обозначением переменных величин и расчетных параметров элементов. Составлено краткое описание силовых цепей электровоза и функциональных жлементов САУ, и принципа автоматического управления. |