Практические работы
 Скачать 1.06 Mb. Скачать 1.06 Mb.
|

|
Екибастузский инженерно-технический институт имени академика К.Сатпаева Кафедра: «Транспорт»  Практические работыДисциплина: «Основы теории автоматического управления» специальность: 5В071300 Транспорт, транспортная техника и технология Разработал ст. преподаватель Михайлиди И.И. Екибастуз, 2020 г. Аннотация Дисциплина «Основы теории автоматического управления» предусматривает освоение основных задач автоматического управления, представление о методах определения законов управления объектами средствами автоматики; построение математических моделей системы автоматического управления, методы исследования линейных и нелинейных САУ, определение устойчивости и качества систем автоматического управления, решения задачи оптимального управления и современные тенденции развития систем управления. Дисциплина «Основы теории автоматического управления» предусматривает проведение практических занятий, которые способствут более успешному усвоению учебного материала, приобретение навыков в решении практических задач, связанных с технологией производства. Учебный материал базируется на знаниях, полученных студентами при изучении физики, математики, теория механизмов и машин, детали машин, электроника и основы электроники. Его изложение необходимо увязывать с задачами стоящими перед железнодорожным транспортом по интенсификации перевозочного процесса. Автор: Михайлиди И.И. - ст. преподаватель Екибастузского инженерно-технического института имени академика К.Сатпаева ПРАКТИЧЕСКАЯ работа №1 Тема: Первичные элементы автоматики Цель работы: Изучение и принцип действия датчиков. Содержание работы: Изучить классификацию датчиков и их основные характеристики. Конструктивные схемы датчиков. Для автоматического управления или регулирования производственным процессом нужно измерить, а затем поддерживать в определенных пределах или изменять согласно технологии процесса какую-нибудь величину. Чтобы измерить неэлектрическую величину, в большинстве случаев ее необходимо прежде преобразовать в другую величину, более удобную для усиления и передачи на расстояние. Обычно, неэлектрические величины преобразуются в электрическую величину (т.е. в электрический сигнал), пневматические или гидравлические, пропорциональные неэлектрической величие. Датчики представляют собой чувствительные элементы предназначенные для измерения физических величин и преобразования в величины другого вида, более удобные для усиления, передачи на расстояние. В автоматизации производственных процессов датчик предназначен воспринимать и преобразовывать параметр, характеризующий процесс протекания технологического процесса. Величина, воспринимая и контролируемая датчиком, называется входной; величина, преобразованная датчиком и вырабатываемая им, называется выходной. Основные характеристики датчиков. Статистическая, чувствительность датчиков, порог чувствительности, инерционность датчика и погрешность. Более сложные схемы имеют дифференциальные и компенсационные датчики. В зависимости от того, в какую физическую величину датчик преобразует измеряемый импульс, определяется и содержание автоматики: на электрической основе, на пневматической или гидравлической основах. Конструктивно реостатные датчики выполняются как датчики угловых или линейных перемещений. Для измерения развиваемых усилий находит применение угольный датчик (рисунок 1).   Рисунок 1 – Конструкция угольного датчика Тензодатчики. Тензодатчиком называется датчик, преобразующий измеряемую деформацию твердых тел в электрическую величину. Изменение сопротивления проводника тензодатчика при действии деформации объясняется двумя причинами: изменением геометрических размеров и изменением удельного сопротивления материала тензодатчика. Коэффициент тензочувствительности.   – безразмерная величина и может быть как положительной, так и отрицательной. – безразмерная величина и может быть как положительной, так и отрицательной.1 – проволока 2 – изолятор F – деформирующая сила.  1 – выводы 2 – проволока 3 – бумага или лаковая пленка Рисунок 2 – Конструкция тензометрических датчиков Индуктивные датчики Они работают на принципе изменения полного сопротивления катушки со стальным сердечником при перемещении подвижной части – стального якоря.  1 – неподвижный магнитопровод, 2 – подвижный якорь, δ– воздушный зазор Рисунок 3 – Конструкция индуктивных датчиков Основные характеристики датчиков Статистическая чувствительность датчиков, порог чувствительности, инерционность датчика и погрешность. Более сложные схемы имеют дифференциальные и компенсационные датчики. В зависимости от того, в какую величину датчик преобразует измеряемый импульс, определяется и содержание автоматики: на электрической основе, на пневматической или гидравлической основах.   а) б) 1 – каркас статистическая характеристика 2 – намотка из проволоки омических датчиков 3 – подвижная щетка Рисунок 4 – Структурные схемы датчиков а) датчик перемещения, б) с секционированной обмоткой.  L – полная длина намотки X – перемещение щетки Рисунок 5 – Потенциометрический датчик    Рисунок 6 – Емкостный датчик  Рисунок 7 – Термоэлектрические датчики Фотоэлектрические датчики Ими называются датчики, которые реагируют на изменение освещенности. В фотоэлектрических датчиках используются три вида фотоэффекта: внешний, внутренний, вентильный.  вольт – амперная характеристика световая характеристика (световой поток). Чувствительность (интегральная, спектральная) свет. поток (люмен) вызвавший этот ток. Рисунок 8 – Схема фотоэлектрического датчика Датчики давления, расхода, уровня скорости   1 – входной вал 2 – грузы 3 – муфты 4 – пружина 5 – орган настройки а) б)  в) Рисунок 9 – Схемы датчиков давления, расхода, уровня скорости. а) датчик давления, б) датчик скорости (тахогенератор), в) датчик уровня жидкости ПРАКТИЧЕСКАЯ РАБОТА №2 Тема: Промежуточные элементы автоматики Цель работы: Изучение основных схем, классификация и характеристика усилителей, реле. Содержание работы: Изучение основных схем усилителей. 1. Основные определения усилителей Усилителем называется устройство, которое служит для количественного преобразования входной величины (сигнала), причем входная и выходная величина остаются одинаковыми по физической природе. Увеличение энергии выходной величины по сравнению с энергией входной величины получается за счет использования энергии внешнего источника. Необходимость применения усилителей объясняется тем, что сигнал датчика обычно очень слаб и недостаточен для управления последующими элементами системы управления, в том числе исполнительным устройством. В связи с этим усилитель можно определить как управляющее устройство, которое предназначено для изменения величины вспомогательной энергии, поступающей к исполнительному двигателю, в соответствии с величиной сигнала датчика. 2. Классификация усилителей Усилители делятся на группы по двум классификационным признакам. Первый признак - характер работы: плавный, пропорциональный или ступенчатый. Усилители пропорционального типа характеризуются тем, что при плавном, постепенном изменении силы подводимого к ним сигнала также плавно и постепенно изменяется и величина выдаваемого ими усиленного сигнала. Усилители ступенчатого типа так же, как и датчики контактного типа реагируют только на определенную величину входного сигнала. Вторым признаком, по которому классифицируются усилители, является вид подводимой к ним энергии, которая используется для усиления входного сигнала. По этому принципу усилители делятся на электрические, гидравлические и пневматические. 3. Основные характеристики усилителей Основными характеристиками усилителей являются рабочая характеристика и коэффициент усиления. Рабочая характеристика усилителя представляет собой зависимость выходной величины от входной при установившемся режиме. Например, для напряжения U рабочая характеристика имеет вид: коэффициентом усиления называется отношение значение величины на выходе усилителя к значению величины на входе.  а) характеристика усилителя плавного действия б) характеристика усилителя релейного действия в) характеристика электромагнитного реле Рисунок 1 – Графические характеристики усилителей Электрические контакты могут рассматриваться как усилитель (рисунок 2). Для перемещения контакта необходимо приложить малое усилие; контакты не включают электродвигатель, который может вызвать большое усилие.  1 - подвижной контакт 2,3 - неподвижный контакт В, Н - катушки контакторов, предназначенные для включения электродвигателя Рисунок 2 –Расположение электрических контактов Электромагнитное реле, являющееся наиболее распространенным типом реле, представляет собой простейший усилитель. Действительно, для срабатывания реле необходимы малые токи (или напряжения), а контакты реле включают значительно большие токи. Например, реле МКУ-48 с катушкой на 220Б переменного тока потребляет рабочий ток 0,0120, а' ток, замыкаемый контактами, составляет 5а, при таком же напряжении. Следовательно, коэффициент усиления т.е. слабый сигнал при помощи реле усиливается. Электронным усилителей называется аппарат, осуществляющий усиления при помощи электронной лампы. Основным назначением трехэлектродной лампы является усиление переменного напряжения. Переменное напряжение, которое следует усилить, подводится к сети и катоду лампы, а усиленное напряжение снимается в анодной цепи. Усиление при помощи трехэлектродной лампы производится за счет источника энергии, питающего анодную цепь. Магнитные усилители Действие магнитных усилителей основано на использовании свойств ферромагнитных материалов.  Рисунок 3 – Схема работы магнитного усилителя Возьмем два одинаковых трансформатора и соединим их первичные обмотки последовательно, а вторичные последовательно и встречно (3). Если теперь первичные обмотки включить в сеть переменного напряжения, то по сердечникам трансформаторов будут проходить магнитные потоки, величины которых определяется намагничивающей силой первичной обмотки J10ω1 (где J10- ток холостого хода, ω1 - число витков первичной обмотки). Эти магнитные потоки будут индуктировать во вторичных обмотках электродвижущие силы. Результирующая Э.Д.С. во вторичной цепи трансформаторов отсутствует. Если теперь замкнуть вторичные обмотки на какой-нибудь прибор, то по этим обмоткам ток протекать не будет и, следовательно, не изменится величина тока в первичных обмотках. Подадим теперь во вторичные обмотки постоянный ток J2 этот ток вызовет уменьшение действующей магнитной проницаемости, т.к. увеличится напряженность магнитного поля. С уменьшением магнитной проницаемости будет уменьшаться и индуктивность L в первичных обмотках, что в свою очередь Вызовет уменьшение их полного сопротивления и тем самым увеличение тока J1. Все это видно из нижеследующих формул: где, µ - магнитная проницаемость; L - индуктивность; (WL) - полное сопротивление. Итак, при помощи подмагничивания постоянным током можно изменять в широких пределах индуктивность в первичных обмотках и, следовательно, ток в первичной цепи. Если в цепь первичных обмотках последовательно включать нагрузку Rн, - то мощность постоянного тока, расходуемого в цепи вторичных обмоток будет значительно меньше мощности, выделяемой в нагрузке Rн. Поэтому такое устройство называется усилителем. Пневматические усилители Для преобразования механических импульсов (перемещений) соответствующее давление сжатого воздуха и для усиления применяются пневматические усилители. Основным элементом пневматических усилителей является устройство «сопло-заслонка». Схема работы пневматического усилителя (рисунок 4)   Рисунок 4 - Схема работы пневматического усилителя ПРАКТИЧЕСКАЯ РАБОТА № 3 Тема: «Исследование характеристик реле, применяемых в схемах автоматики» Цель работы: Исследовать принципиальную схему (конструкцию) и принцип действия электромагнитного реле Задачи исследования: - Назначение и классификация реле - Виды реле постоянного тока - Отличие нейтрального реле от поляризованного реле - Виды нейтральных эл/магн. реле Ход работы Электромагнитные реле являются основными элементами релейно-контактных схем автоматики. Под термином реле понимается автоматически действующий аппарат, предназначенный при заданном значении (входной) воздействующей величины, производить скачкообразные изменения в управляемых системах. Релейные схемы автоматики очень широко используются при автоматизации производственных процессов ремонта вагонов, так как не требуют высококвалифицированного персонала при их проектировании и обслуживании, отличаются простотой и достаточной надежностью. Электромагнитные контактные реле являются промежуточными элементами, приводящими в действие одну или несколько управляемых электрических цепей. В настоящее время для автоматизации технологических процессов вагоноремонтного производства широко применяются промежуточные реле переменного и постоянного тока типа: РПУ-1, РПУ-2, МКУ-48, РП-23, РП-25, РП-221, РП-222,РП-223, РП-224 и др., которые выпускаются на напряжение 110, 220, 380 В.- переменного и 24, 48, 110, 220 В.- постоянного тока. Реле состоит из трех основных органов: Воспринимающего, который воспринимает управляющее воздействие и преобразует его в воздействие на промежуточный орган. Промежуточный орган при достижении управляющим воздействием заданной величины передает это воздействие исполнительному органу (контакту), который осуществляет скачкообразное изменение управляемой величины. Наибольшее распространение в схемах автоматизации получили нейтральные электромагнитные реле. 2. Электромагнитные нейтральные реле. ЭМНР бывают трех видов: с поворотным якорем, с втяжным якорем и с герконом (герметизированным магнитоуправляемым контактом). 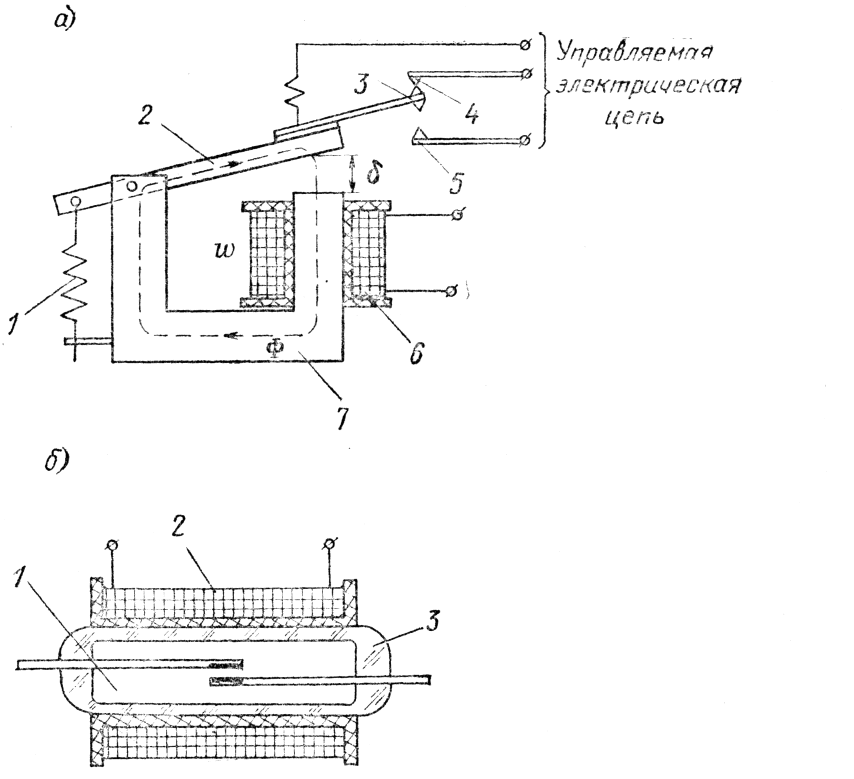 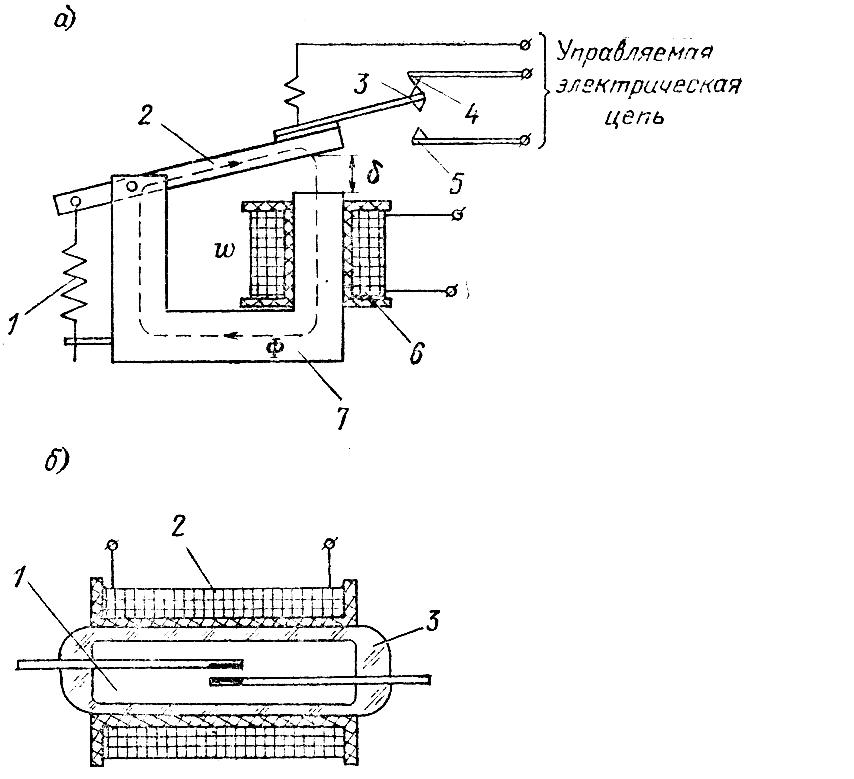 3. Рассмотрим упрощенную схему реле с поворотным якорем и с герконом. 3. Рассмотрим упрощенную схему реле с поворотным якорем и с герконом.а – реле с поворотным якорем б – реле с герконом 1 – возвратная пружина; 2 – якорь; 3 – средний 1 – геркон; 2 – катушка; контакт; 4 – размыкающий контакт; 3 – баллон геркона 5 – замыкающий контакт; 6 – обмотка; 7 – сердечник (магнитопровод) Рис. 1 4. Принцип действия реле. а) в реле с поворотным якорем в выключенном состоянии якорь 2 находится под действием возвратной пружины 1 и занимает верхнее положение. При этом средний контакт 3, связанный с якорем реле, замкнут контактом 4 (размыкающий контакт). Контакт 5 в этом положении разомкнут. Если подать ток на обмотку 6 (в катушку), то возникнет магнитный поток Ф , замыкающийся по сердечнику (магнитопроводу) 7, якорю 2 и воздушному зазору δ. Магнитный поток намагничивает якорь и возникает эл.магнитная сила, пропорциональная квадрату ампер-витков катушки (характеристика обмотки): Fэ = k (I ω)2 / δ 2, где I – ток в обмотке; ω – число витков; δ – воздушный зазор между якорем и сердечником в разомкнутом состоянии. Под действием этой силы якорь поворачивается и замыкает контакты 3 и 5. Этот этап работы реле называется срабатыванием. При выключении тока электромагнитная сила исчезает, и контакты реле возвращаются в исходное положение. Происходит отпускание. б) реле с герконом имеют самую простую конструкцию: геркон 1 – стеклянная трубка 3 с впаянными внутри неё двумя контактными пружинами из магнитомягкого ферромагнитного материала (пермоллоя), размещают внутри катушки (обмотки) 2. Контактные пружины одновременно выполняют роль якоря и сердечника, контактов и возвратной пружины. Концы пружин покрывают тонким слоем серебра, золота или родия для обеспечения надежного контакта при соприкосновении пружин. Внутри баллона создается либо вакуум, либо колба заполняется инертным газом (аргон, азот). При подаче тока в обмотку возникает магнитный поток, который намагничивает контакты, между ними возникает магнитная сила, контакты притягиваются и замыкаются. 5. Основные параметры реле. К основным параметрам реле относятся ток срабатывания – Iср , время срабатывания – tср, рабочий ток – Iр, время отпускания – tотп и ток отпускания – Iотп. Временные диаграммы реле показаны на рис. 2.  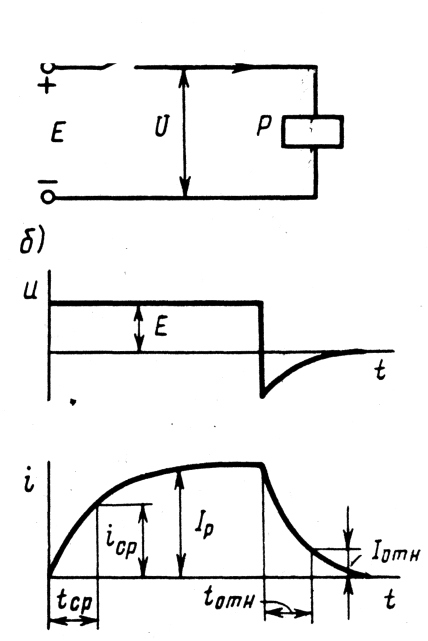 Рисунок 2 Из анализа временных диаграмм следует, что, рабочий ток Iр = Е/R, где R – активное сопротивление цепи катушки, зависящая от её индуктивности и постоянной времени. Ток в катушке достигает своего рабочего значения по нелинейному закону (из-за индуктивности); аналогично, при выключении напряжения ток также не прекращается сразу. Поэтому быстродействие реле зависит от параметров катушки намагничивания релейных контактов. Iср и Iотп. являются пороговыми параметрами чувствительности и быстродействия реле. 6. Достоинства и недостатки работы реле. Контакты реле изготавливают из различных материалов. Выбор зависит от механического давления, условий работы по частоте, разрывной мощности и ресурса работы. Кроме того имеют место механический износ, химическая коррозия и др. По форме контакты бывают разные. Наиболее распространены следующие формы (см. рис. 3).  Рис.3. Формы контактов: а – плоскоострая пара; б – полушар-полушар При замыкании и размыкании контактов реле, включенных в эл. цепь с ЭДС, происходит искрение между контактами. Наиболее сильное искрение происходит при размыкании цепи с индуктивной нагрузкой. Искрение приводит к обгоранию и оплавлению контактов, кроме того, в цепи возникают помехи, которые нарушают работу аппаратуры. Искрение стараются снизить или вообще избежать. Этого можно достигнуть включением реле в цепь с одновременным искрогашением. Примеры таких схем приведены на рис. 4.Рис. 4. Схемы искрогашения: с диодом (а) и с конденсатором (б). Вывод. Электормагнитные нейтральные реле нашли более широкое применение, чем поляризованные, т.к. срабатывание не зависит от направления поданного сигнала. Реле могут работать и как усилители, т.к. сигнал для срабатывания реле чаще всего много меньше сигнала цепи, которую замыкают/размыкают реле. Однако имеются недостатки: а) малая скорость срабатывания, из-за инерционности магнитного поля, посредством которого осуществляется включение/выключение реле; б) невысокая жизнестойкость (время службы реле) из-за износа контактов; в) потери мощности в цепи из-за нагрева катушки. Порядок выполнения 1. Рассмотреть схему устройства реле и его конструкцию 2. Описать принцип действия реле и область его применения 3. Зачертить условную конструкцию реле 4. Определить основные параметры реле 5. Сделать вывод об основных качествах (скорость срабатывания и отпускания, искрение и методы борьбы с ним, достоинства, недостатки) ПРАКТИЧЕСКАЯ РАБОТА № 4 Тема: Изучение работы схемы управления электродвигателей постоянного тока. Цель работы: Исследовать принципиальную схему (конструкцию) и принцип действия электродвигателей Задачи исследования: - Назначение и классификация электродвигателей постоянного тока. - Конструкция и принцип действия эл/двигателя постоянного тока. - Схемы управления двигателем. Общие сведения Различают двигатели постоянного, переменного тока и шаговые двигатели. Электрические двигатели постоянного тока широко применяются в устройствах автоматики в качестве ИУ, преобразующих электрический ток в механическую величину – вращающий момент. Конструкция ЭД постоянного тока и схема управления им показана на рис. 1.11.  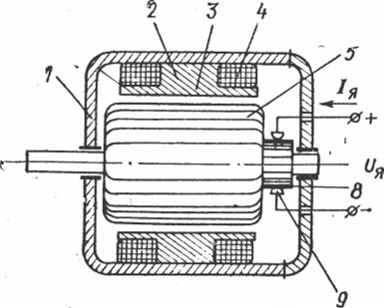 Рис. 1.11. Электродвигатель постоянного тока а – схема управления ЭД ПТ; б – упрощенная схема устройства ЭД; 1 – корпус; 2 – полюсы; 3 – наконечники; 4 – обмотка; (1 – 4 статор); 5 – магнитопровод; 6 – вал; 7 – обмотка якоря; 8 – коллектор; (5 – 8 подвижный якорь); 9 – щетки Основными элементами двигателя являются неподвижный статор (состоит из корпуса-станины 1, полюсов 2 с полюсными наконечниками 3 и обмотки возбуждения 4) и вращающийся якорь (состоит из цилиндрического магнитопровода с пазами 5,запрессованного навал 6, обмотки якоря 7, расположенной в пазах магнитопровода, коллектора 8, к которому припаяны выводы секций обмотки). Ток к якорю двигателя подводится через угольные щетки 9, скользящие по коллектору. Ток, протекающий по обмотке возбуждения 4, создает магнитный поток ФВ , пронизывающий секции 7 обмотки якоря 5. В результате взаимодействия магнитного потока ФВ с электрическим током, протекающим в обмотке якоря Iя , возникает вращающий момент МВР и якорь начинает вращаться с частотой Ω. Вращающий момент пропорционален магнитному потоку ФВ возбуждения и току якоря Iя : МВР = k ФВ *Iя, где k - постоянный коэффициент, зависящий от конструкции двигателя. В маломощных электродвигателях для создания магнитного потока часто используют постоянные магниты. Использование постоянных магнитов позволяет создавать новые конструкции ЭД постоянного тока. В зависимости от схемы включения обмотки возбуждения ЭД ПТ делятся на двигатели с независимым возбуждением, параллельным, последовательным и смешанным. Содержание отчета 1. Эл/двигатели постоянного – основные понятия и различия. 2. Описать принцип действия и область применения эл/двигателей; зачертить их условную конструкцию по вариантам. 3. Сделать вывод об основных преимуществах рассмотренного эл/двигателя. ПРАКТИЧЕСКАЯ РАБОТА № 5 Тема: Изучение работы схемы управления электродвигателей переменного тока. Цель работы: Исследовать принципиальную схему (конструкцию) и принцип действия электродвигателей Задачи исследования: - Назначение и классификация электродвигателей переменного тока. - Виды двигателей (синхронные, асинхронные; одно- двух- и трехфазные). - Конструкция и принцип действия эл/двигателя переменного тока. - Схемы управления двигателем (амплитудная и фазовая) Общие сведения Различают двигатели постоянного, переменного тока и шаговые двигатели. Электрические двигатели переменного тока. Принцип их работы основан на взаимодействии вращающего момента магнитного поля, создаваемого обмотками статора (неподвижная часть ЭД), с магнитным потоком, создаваемым ротором (подвижная часть ЭД). ЭД, у которых частота вращения ротора равна частоте вращения магнитного поля статора, называют синхронными. ЭД, у которых частота вращения ротора меньше частоты вращения магнитного поля статора, называют асинхронными. В устройствах автоматики чаще всего применяют асинхронные двигатели. Рассмотрим их подробнее. В зависимости от числа фаз эти ЭД делятся на однофазные. Двухфазные и трехфазные. Первые имеют небольшую мощность и используются в основном в устройствах нерегулируемого электропривода (например, в маломощных вентиляторах). Трехфазные асинхронные ЭД чаще всего используются в устройствах нерегулируемого электропривода с мощностью от нескольких ватт до нескольких тысяч кВт , реже – в регулируемых приводах, которые имеют сложную схему. Эти ЭД применяют в устройствах электроприводов станков, мощных вентиляторов, компрессоров, насосов и др. У двухфазных ЭД сравнительно легко изменяется частота вращения и момент, поэтому они нашли широкое применение в устройствах регулируемого электропривода с мощностью от нескольких десятых долей ватта до сотен ватт. В зависимости от конструкции эти ЭД делятся на ЭД с короткозамкнутым ротором, с полым магнитным ротором, с полым ферромагнитным ротором. На рис. 1.12 показаны устройство и схема включения двухфазного асинхронного ЭД с короткозамкнутым ротором. 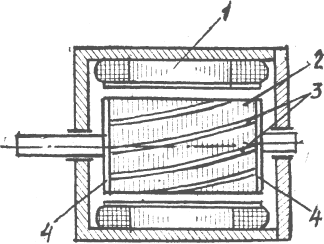 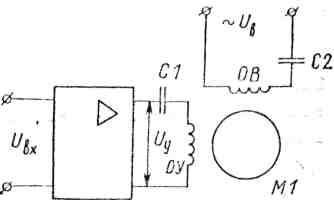 Рис.1.12. Устройство и схема включения двухфазного асинхронного двигателя а- устройство; б- схема амплитудного включения На статоре 1 расположена двухфазная обмотка, которая при подключении к ней двух напряжений, сдвинутых по фазе на 90 О, создает вращающееся магнитное поле. Ротор 2 выполняется в виде цилиндра из листовой стали. Обмотка ротора выполнена в виде беличьей клетки и не имеет выводов, т.е., является короткозамкнутой. Стержни 3 обмотки размещаются в пазах ротора и замыкаются накоротко с торцов двумя кольцами 4. В ЭД малой мощности беличью клетку обычно получают заливкой расплавленного алюминия в пазы ротора. Принцип работы этого двигателя основан на появлении вращающего магнитного поля при подаче на обмотки статора – обмотку возбуждения (ОВ) и обмотку управления (ОУ) – переменных напряжений UВ и UУ , сдвинутых по фазе на 90 О Содержание отчета 1. Эл/двигатели переменного тока – основные понятия и различия. 2. Описать принцип действия и область применения эл/двигателей; зачертить их условную конструкцию по вариантам. 3. Сделать вывод об основных преимуществах рассмотренного эл/двигателя. Практическая работа № 6 Тема: Основные логические операции И, ИЛИ, НЕ в релейно-контактном (бесконтактном) исполнении Цель работы: изучить приемы построения схем на унифицированных логических блоках, выполняющих простейшие математические (логические) операции. Задачи исследования: Назначение и классификация элементарных логических узлов Приемы решения простейших логических задач («И», «ИЛИ», «НЕ», «И-НЕ» и др.) в двоичном исчислении Содержание отчета: 1. Начертить таблицу простейших логических операторов 2. По таблице решить варианты простейших логических задач 3. Составить систему из простейших логических блоков по заданному математическому уравнению 4. Выводы Ход работы 1. См таблицу 1 Основные логические операции, реализуемые на полупроводниковых элементах (ИС, БИС) 2. Решим, например, задачу «ИЛИ – НЕ» Составим таблицу и определим значения выходной величины Y по заданным входным величинам Х1 и Х2 в разных сочетаниях (см. рис.1 и табл. 2): 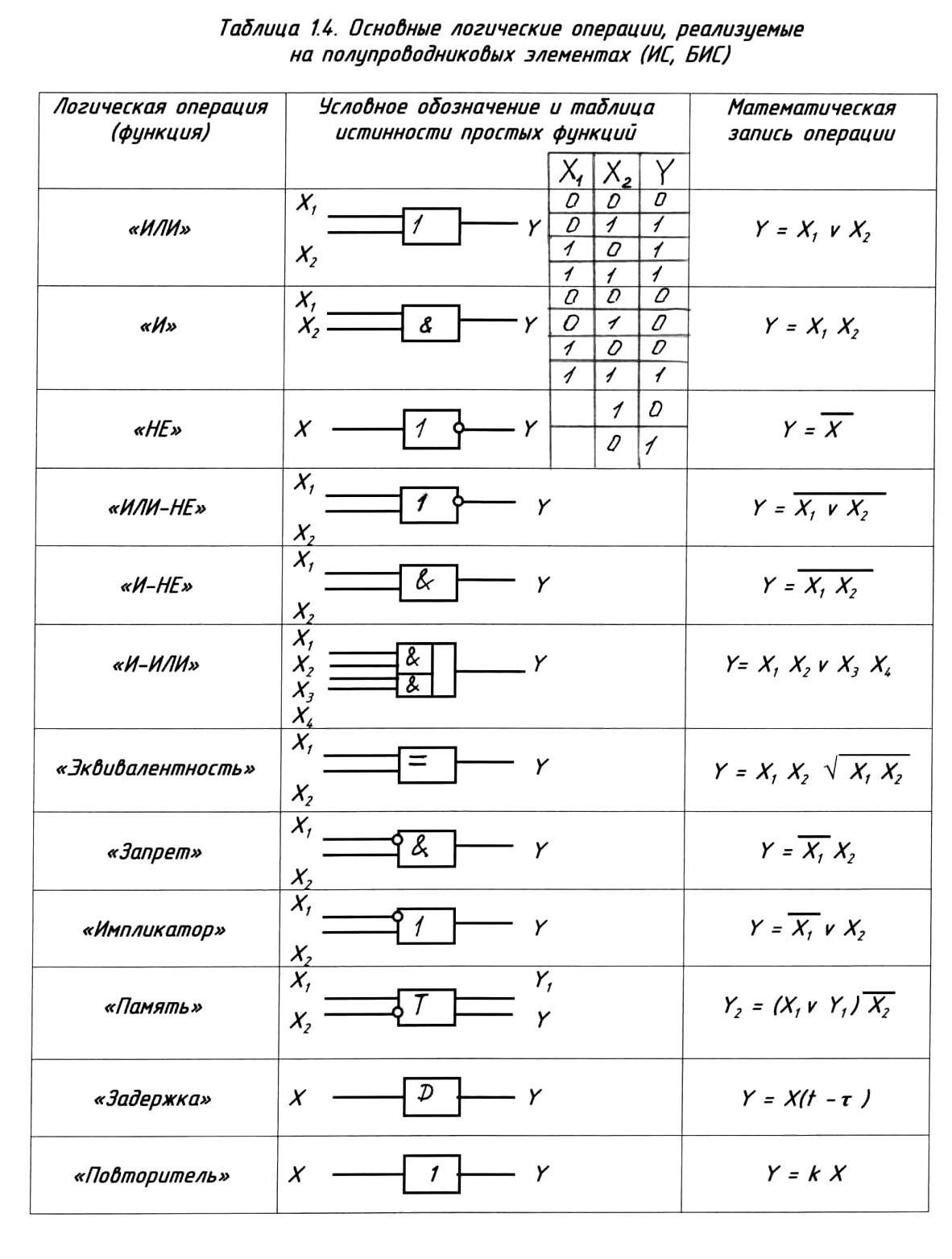 Рис. 1 Рис. 1Таблица 2
Аналогично можно решить любые простейшие задачи из таблицы 1 3. Составим систему из простейших логических блоков по заданному математическому уравнению. Например: Y = (Y1 *Y2 ) + Y3 ,, где Y1 – «И-НЕ», Y2 – «ИЛИ», Y3 – «И», то есть:  Y1 = Х1 * Х2 Y2 = Х3 + Х4 Y3 = Х5 * Х6 Тогда суммарная схема выглядит следующим образом (см. рис.2), а решения для разных вариантов значений входных величин Х1 . . . Х6 – см. табл. 3. Т  аблица 1 аблица 14 По приведенной схеме решим несколько задач, т.е. определим значение величины на выходе Y от заданных величин на входе (Х1 , Х2 , Х3 , Х4 , Х5 , Х6 ): Таблица 3
 Х1 Y1 Х2 Y1 *Y2 Х3 Y2 Y Х4 Х5 Y3 Х6 Рисунок 2 5 Вывод. Для решения сложных математических задач методами электронной логики необходимо составить полное математическое уравнение, перевести его в вид логического уравнения, составленного из простейших логических операторов, а затем решить, как приведено выше. Для моделирования решения задач в ЭВМ применяют именно такой путь. ЛИТЕРАТУРА 1. «Основы теории автоматического управления транспортной техники» В.Г. Солоненко, М.Д. Габдуллин, А.Б. Шимбулатова, М.Ж. Туркебаев- Алматы, 2006 – 165с. 2. «Системы автоматизации производства и ремонта вагонов» М,М. Болотин, В.Е. Новиков - Москва, 2004 – 307с. 3. В.А. Бесекерский, Е.П. Попов. Теория систем автоматического управления. С-П., Профессия., 2004г., 752с. 4. Лурье Б.Я., Энрайт П.Д. Классические методы автоматического управления. – СПб: БХВ – Петербург, 2004.-628с. Скачано с www.znanio.ru |