СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ГЛАВНОГО ДВИГАТЕЛЯ. Курсовая раб. по автом-ке. Правила эксплуатации и технического обслуживания. Технические требования к регуляторам частоты вращения. Расчет динамических характеристик судового двигателя
 Скачать 1 Mb. Скачать 1 Mb.
|

|
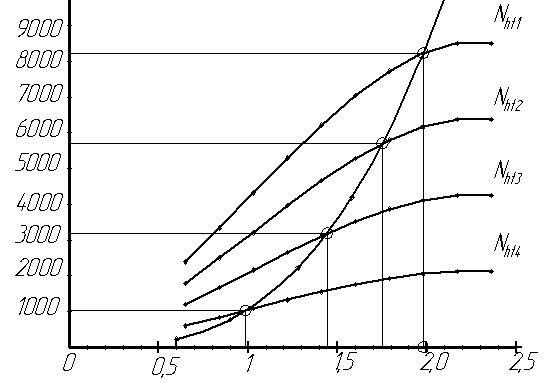
Содержание Введение: Цели и задачи курсовой работы. Исходные данные. Описание и принцип действия регулятора. Правила эксплуатации и технического обслуживания. Технические требования к регуляторам частоты вращения. Расчет динамических характеристик судового двигателя. Уравнения динамики регулятора частоты вращения. Оптимизация переходных процессов. Оценка влияния параметров настройки на процесс регулирования. Список используемой литературы. 1. Цели и задачи курсовой работы. Целью курсовой работы является изучение методов решения таких задач как: освоение состава, принципа действия, правела эксплуатации и технического обслуживания, метода статической и динамической настройки, порядок поиска и устранения неисправностей АСУ энергетической установки по имеющимся для этих целей данным. Состав АСУ определяется степенью автоматизации ЭУ, структурным совершенством её локальных подсистем и элементов. Для каждой АСУ следует описать отличительные признаки элементной базы, способы формирования законов регулирования, приспособление для статической и динамической настройки, конструкции регулирующих органов, порядок прохождения и формирование сигналов информации. В пункте правил эксплуатации необходимо описать периодичность наблюдений и действия по источникам энергии АСУ, частоту энергоносителя: последовательность действий при вводе АСУ в работу и выводе из работы. В разделе технических требований должны быть описаны наиболее вероятные неисправности АСУ, внешне их проявления, возможность и порядок их устранения в судовых условиях, способы восстановления статических характеристик АСУ и их совмещение, установления заданных значений регулируемой величины. Приобретение опыта динамической настройки АСУ на ее модели, воспроизведенной на ЭВМ - важнейшая задача курсовой работы. Здесь же подбираются значения параметров динамической настройки регулятора, обеспечивающие заданное техническими требованиями качества переходного процесса. Выявить влияние каждого параметра на устойчивость и качество переходных процессов. 2. Исходные данные Марка двигателя……………………………………9RД90. Номинальная мощность двигателя, кВт…………..Ng=8230 кВт. Номинальная скорость вращения вала…………… Передача на винт……………………………………Прямая. Момент инерции…………………………………….J=148,96 кН*м*с2 Диаметр гребного винта……………………………D= 6000 мм. Шаг гребного винта………………………………...Н= 5270 мм. Число лопастей гребного винта……………………z = 5. Дисковое отношение……………………………….Ѳ=0,6 Описание и принцип действия регулятора. Регуляторы скорости двигателей Д- 50 и Д 100 используются на тепловозных двигателях, двигатели применяются в качестве главных на промысловых судах и в качестве вспомогательных дизель- генераторов – на некоторых пассажирских и транспортных морских судах. Регуляторы выпускают двух модификаций. При жестких требованиях и постоянству скоростного режима двигателя применяют изодромные регуляторы с вертикальной регулярной характеристикой, а в случае использования двигателей для параллельной работы – регуляторы с двумя обратными связями: гибкой и жесткой. Особенностью регулятора с изодромной обратной связью является его непрерывность, так как двигатели Д 50 и Д 100 нереверсивные. Чувствительный элемент имеет форму резьбовых стержней с гайками. Изменения задания скоростного режима осуществляется посредством воздействия зубчатого сектора на пружину переменной жесткости. Давление масла создается насосом и поддерживается постоянно аккумуляторными поршнями. Высокая чувствительность достигается вращением втулки относительно золотника. При этом аксиальное трение пары “ золотник – втулка “ сводится к минимуму. При нарушении равновесного скоростного режима золотник сообщает напорную масляную магистраль с нижней управляемой полостью сервомотора (в случае увеличения нагрузки), и поршень сервомотора преодолевая натяжение пружины увеличивает подачу топлива. При уменьшении нагрузки золотник перемещается вверх и сообщает нижнюю управляемую полость сервомотора со сливной. Под действием пружины поршень сервомотора перемещается вниз на уменьшение подачи топлива. Поршень является задающим 14, а поршень 9 – воспринимающим изодромной обратной связи. Время действия изодромной связи определяется временем выравнивания давления в начале изодромной связи и в сливной полости через калиброванное отверстие, регулируемой иглой изодрома. Соленоидный клапан позволяет сообщать нижнюю и верхнюю полости сервомотора для быстрой остановки двигателя. Пружина служит для компенсации силы тяжести деталей вращающейся втулки и коррекции давления в начале изодрома при больших ходах поршня сервомотора. При параллельной работе двигателей регулятор дополняется жесткой силовой обратной связью. При перемещении поршня сервомотора вверх его движение через шток обратной связи и рычага 4 посредством кулачного выступа передается на плунжер, который поджимает пружину задания. Золотник чувствительного элемента возвращается в исходное положение, а равновесное состояние достигается уже при дополнительной затяжке пружины задания и более высокой угловой скорости. При движении поршня сервомотора вниз затяжка пружины задания соответственно уменьшается, и равновесное состояние чувствительного элемента достигается при более низкой угловой скорости. Этим достигается статизм. Для изменения угла наклона регуляторной характеристики при помощи планки смещают кулачный выступ. Параллельное смещение регуляторной характеристики осуществляется изменением затяжки пружины задания при помощи шестерни и зубчатой втулки. Правила эксплуатации и технического обслуживания. Автоматические регуляторы скорости, как и другие механизмы, в процессе длительной эксплуатации подвержены изнашиванию и раз регулированию. Характер изнашивания определяется конструкцией, видом энергии, применяемой для работы регулятора, условиями эксплуатации и выполнением или нарушением, обслуживающим персоналом правил и инструкции по эксплуатации. В процессе эксплуатации в механических регуляторах образуются люфты в шарнирных соединениях, гидравлические не плотности, изменяется жёсткость пружины и сильфонов, изменяются силы трения подвижных деталях, наблюдается поломки шестерен, валов, пружин и других деталей. Все это приводит к изменению статических и динамических характеристик регуляторов. Изменяются коэффициенты усиления, постоянные времени, устойчивость системы, ухудшается качество переходных процессов, снижается точность регулирования. Правильная эксплуатация, профилактические осмотры, своевременно проводимый ремонт и наладка автоматических регуляторов обеспечивает их безотказную длительную работу. Для правильной эксплуатации необходимо знать конструкцию и принцип действия регулятора, физическую сущность процессов, протекающих в автоматическом регулировочном объекте и регуляторе. Следует соблюдать графики осмотров, проверок и ремонта, своевременно заполнять формуляры технического состояния регулятора. Особое внимание следует уделять чувствительным элементам, которые являются датчиками первичной информации. Техническое обслуживание регуляторов частоты вращения непрямого действия включает ежедневный контроль и технический уход через определенное количество часов работы. Ежедневный контроль осуществляется за температурой регулятора, которая недолжна, превышать 60-70 -нагрузки двигателя (чтобы убедится в том, что двигатель не перегружен); -равномерности работы цилиндров, для чего надо измерить давление конца сгорания у всех цилиндров, а также убедиться в нормальной работе топливной аппаратуры; системой тяг и рычагов между входным валом регулятора и рейкой топливных насосов. После этого необходимо проверить настройку гибкой обратной связи регулятора. Регуляторы с гибкой обратной связью не могут работать при засорении отверстий изодромной иглы или при полном ее закрытии. Если наблюдается небольшое отклонение регулируемой частоты вращения, следует осмотреть привод регулятора: причиной может быть заедания или чрезмерно большой зазор в зубьях шестерни привода. В случаях больших колебаний частоты вращения и большой неравномерности, которые не устраняются регулировкой гибкой обратной связью, регулятор необходимо сменить. Требования предъявляемые к регуляторам. -Конструктивная простота, компактность и надежность. -Срок службы регуляторов должен быть не менее срока службы двигателей на которых они установлены. Весьма и перспективно применение унифицированных моделей регуляторов, имеющих широкий диапазон настроечных параметров и пригодных для различных марок и типов двигателей. -Регуляторы должны надежно работать: а) при б) при вибрации корпуса судна с амплитудами до 1 мм и частотой 20Гц. -Устойчиво работать при длительном крене до -Регуляторы должны обеспечивать с определенной точностью необходимые по условиям эксплуатации двигателя статические и динамические показатели системы регулирования. -Регуляторы должны изготавливаться по техническим условиям и рабочим чертежам, утвержденным в установленном порядке. -Степень неравномерности статической характеристики регулятора -Ресурс регулятора до первой регулировки должен быть не менее 5000 часов. -Регуляторы с широким диапазоном изменения задания должны также обеспечивать устойчивость системы автоматического регулирования во всем рабочем диапазоне частоты вращения. Настройка регулятора с жесткой обратной связью на заданную частоту вращения. Производится изменением натяжения задающей пружины. Для увеличения натяжения пружины серьги поворачиваются вокруг своей оси (правой, неподвижной) против часовой стрелки. Правый конец задающего рычага опускается (т.к. левый его палец проворачивается вокруг нижней оси серьги) и натяжение задающей пружины увеличивается. Плунжер золотника в месте с упорным шарикоподшипником перемещается вниз. Верхняя полость цилиндра сервомотора перемещается верх и его шток перемещает рейку топливных насосов на увеличение подачи топлива. Частота вращения коленвала двигателя увеличиваются, и грузы чувствительного элемента начинают расходиться, приподнимая плунжер золотника. При указанном переходном процессе вступает в работу жесткая обратная связь. Процесс проходит за несколько этапов, но окончание переходного процесса наступит тогда, когда новому натяжению пружины будет соответствовать новая чистота вращения, а плунжер золотника своими кромками перекроет нагнетательные и сливной каналы т.е. поршень сервомотора зафиксируется в каком-то определенном положении. Уравнение динамики двигателя. Динамика судового двигателя, как объекта регулирования скоростного режима с достаточной точностью описывается уравнением первого порядка вида: где Динамические характеристики двигателя представляются графиками, выражающими зависимость коэффициентов уравнения (1) от скоростного режима двигателя. Для этого необходимо располагать частичными и винтовыми характеристиками ДВС. Сопоставление последних позволит установить точки возможных установившихся режимов работы, в которых методами математического анализа можно определить величины коэффициентов уравнения двигателя на любом из режимов. Получение динамических характеристик судового двигателя. Получение частных характеристик двигателя. Значение мощности двигателя при текущем значении n и фиксированном положениирейки ТНВД.  где: Получение внешней характеристики произведем при условии, что положение рейки ТНВД соответствует номинальной подаче топлива, т. е. Расчет частных характеристик выполним для трех положений рейки ТНВД.  При которых двигатель развивает мощность равную:  Вспомогательные расчеты для получения характеристик двигателя. Табл.1
Ординаты внешних и частичных характеристик. Табл.2
 Получение винтовых характеристик двигателя. Коэффициент винта где Н=5,27 м, - шаг гребного винта. По данным винта: Z=5 – число лопастей. H/D=0,88 Коэффициент Где, Ординаты номинальной винтовой характеристики. Табл.№3
Ординаты дополнительных винтовых характеристик.
Относительная поступь для тяжелого и легкого винтов.  где Определяем значение коэффициента момента  Коэффициент С для искомых винтовых характеристик.  Определяем возможные установившиеся режимы работы. Из графиков получены следующие значения.  Определение коэффициентов уравнения динамики двигателя. Для определения числовых значений коэффициентов уравнения динамики двигателя воспользуемся формулами;  Согласно этим формулам коэф. Определяем постоянную времени двигателя. Частные производные, входящие в выражения для нахождения  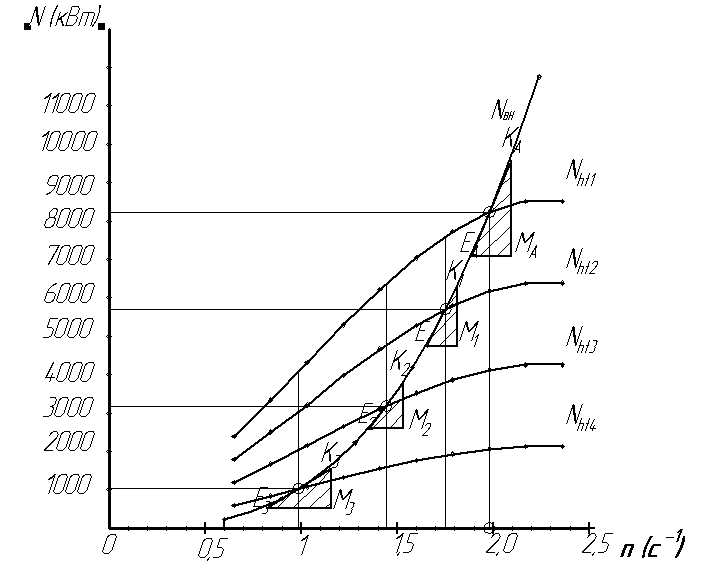 Величины расчетов и значение производной по режимам работы двигателя приведены таблице №
Табл.№4 Для вычисления частной производной  воспользуемся характеристикой ДВС. воспользуемся характеристикой ДВС. 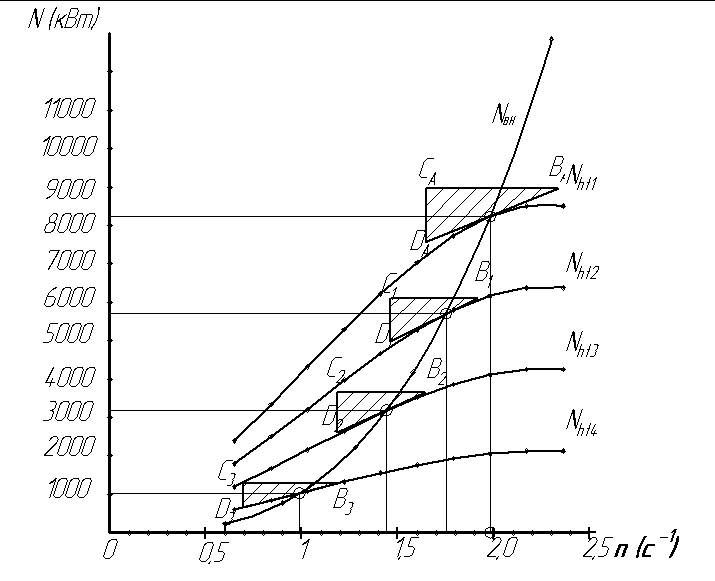 Нахождение величины производной представим в табличной форме. Табл.№5
Постоянная времени ДВС.  , где j=148,96кН м , где j=148,96кН м Находим постоянную времени:  Для нахождения частной производной  ; ; Определение коэффициента усиления двигателя по положению рейки топливных насосов. Для определения коэффициента усиления по положению рейки топливных насосов надо знать значения частной производной . Эти значения можно изучить путем графического дифференцирования характеристик двигателя, перестроенных в координатах “мощность двигателя – положение рейки топливных насосов”.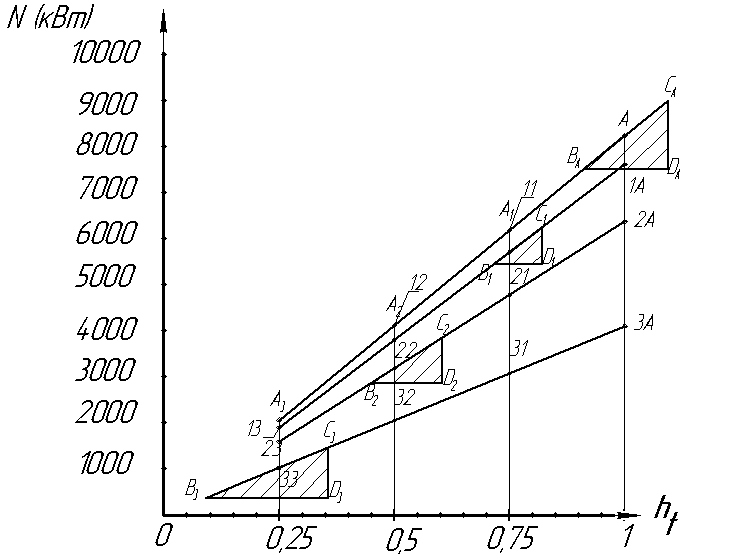 Расчет величин частной производной производим в таблице №6,7 |