СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ГЛАВНОГО ДВИГАТЕЛЯ. Курсовая раб. по автом-ке. Правила эксплуатации и технического обслуживания. Технические требования к регуляторам частоты вращения. Расчет динамических характеристик судового двигателя
 Скачать 1 Mb. Скачать 1 Mb.
|

|
Значения частной производной. Табл.№6
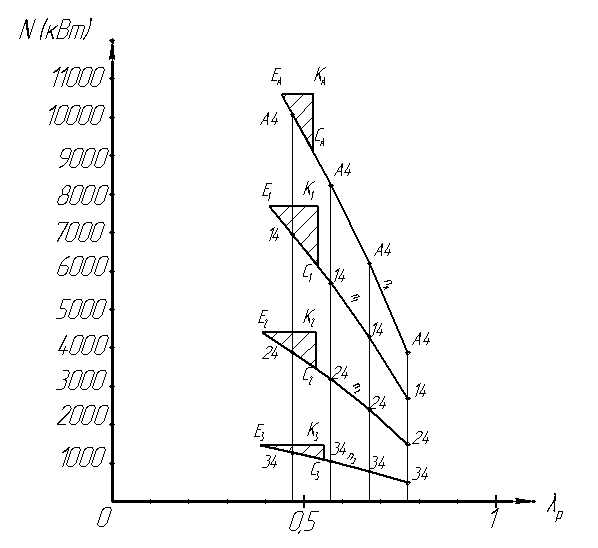 Табл.№7
Коэффициент усиления двигателя по положению рейки ТНВД.  Определение коэффициента усиления двигателя по изменению внешней нагрузки. Для нахождения частной производной Исходная производная в точках установившихся режимов будет определяться как:  Ординаты винтовых характеристик. Табл.№8
Значения частной производной  Вычисления частной производной выполним в таблице №9
 Получение винтовых характеристик двигателя. Численное значение коэффициентов уравнении динамики ГД на установившихся режимах работы сведем в таблицу Значения коэффициентов уравнения динамики двигателя. Табл.№10
Динамика регулятора скорости. Уравнение динамики измерителя. Уравнение динамики измерителя, представляющее аналитическую зависимость изменения во времени его выходной координаты 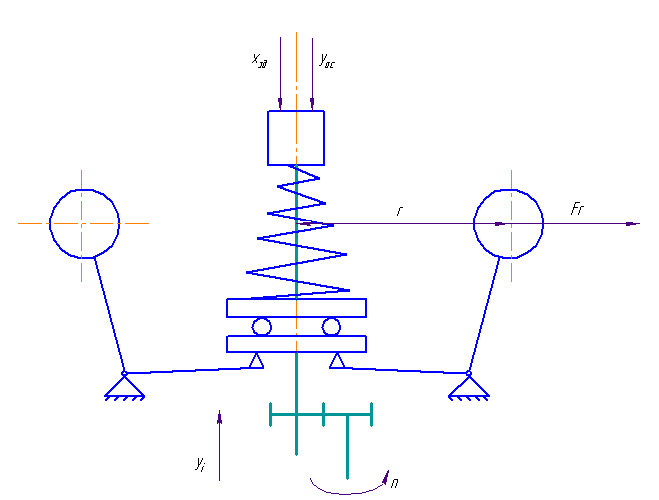  E Fц  A Рис. Схема измерителя. - поддерживающая сила А, представляющая собой суммы приведенных к муфте центробежных сил грузов -восстанавливающая сила - сила веса G движущихся частей, приведенная к муфте; - сила сухого трения -сила скоростного (или жидкостного) трения - приведенная сила реакции струи - сила инерции В соответствии с принципом д,Аламбера, обозначая приведенную массу всех движущихся деталей через С целью упрощения будем пренебрегать силами веса, сухого трения, не уравновешенными силами, силами сопротивления и реакции струи в управляющем золотнике Приведенная центробежная (поддерживающая) сила грузов А определяется суммарной массой грузов Учитывая радиус r может быть однозначно выражен через выходную координату Приведенная восстанавливающая сила Е, равна силе натяжения пружины, является функцией перемещения муфты Для цилиндрических пружин жесткость обычно принимается постоянной, для конических она представляет линейную функцию суммарной величины сжатия Поэтому для общего случая Приведенная сила жидкостного трения пропорциональна скорости движения Будем рассматривать движение измерителя в приращениях относительно некоторого исходного равновесного состояния, тогда можем записать: Приращение сил  Для цилиндрических пружин, обладающих постоянной жесткостью:  и для конических пружин угловой коэффициент  можем иметь различные значения. Он должен определятся в точке статической характеристики, соответствующий исходному режиму при суммарной величине сжатия можем иметь различные значения. Он должен определятся в точке статической характеристики, соответствующий исходному режиму при суммарной величине сжатия Приращения силы жидкостного трения: Уравнение движения измерителя в линейном приближении запишется так:  (2) (2)При переходе к относительным коэффициентам, обозначив: |