2 глава вкр Разработка предложений по усовершенствованию системы предупреждения о сближении ВС. 2 глава вкр Разработка предложений по усовершенствованию системы. Предложения по усовершенствованию системы предупреждения о сближения воздушных судов
 Скачать 0.61 Mb. Скачать 0.61 Mb.
|

|
ПРЕДЛОЖЕНИЯ ПО УСОВЕРШЕНСТВОВАНИЮ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ О СБЛИЖЕНИЯ ВОЗДУШНЫХ СУДОВ Варианты усовершенствованию системы предупреждения о сближения воздушных судов (TCAS) Системы БСПС на данный момент являются основным инструментом, повышающим возможности пилота в ситуациях, связанных с риском столкновения самолетов в воздухе. На данный момент самой распространенной концепцией БСПС является TCAS. Современным вариантом данной системы является TCAS II. Она предназначена для заблаговременного предупреждения экипажа о появлении в окружающем воздушном пространстве других ВС, оборудованных аналогичной системой или хотя бы самолётным ответчиком УВД с режимом ATC RBS и представляющих потенциальную угрозу столкновения. В основу работы современных БСПС положена вторичная радиолокация. Изначально она использовалась только для целей УВД, в частности для представления авиадиспетчерам наряду с координатами ВС дополнительной информации о высоте полёта, идентификационном номере ВС и пр. Стандартам ICAO соответствуют режимы вторичной радиолокации ATC RBS. Бортовые приёмоответчики ATC RBS вырабатывают кодированные ответные радиосигналы частотой 1090 МГц на запросы как наземных ВРЛ, так и систем TCAS II других ВС. Эти ответные сигналы позволяют измерить удаления и угловые координаты относительно всех запросчиков. Кроме того, ответные сигналы содержат идентификационную информацию, используемую в наземных ВРЛ, и информацию о барометрической высоте с округлением до 100 ft, приведённой к стандартной установке давления 1013,25 гПа. Высотная информация используется как диспетчерами УВД, так и в запрашивающих системах TCAS II других ВС для оценки угрозы столкновения. Экипаж имеет возможность наблюдать перемещение отметок этих ВС на кабинном индикаторе воздушной обстановки [1, с. 14-63]. Система TCAS II автоматически отслеживает взаимное расположение ВС и при возникновении угрозы столкновения в соответствии с заложенными в её процессоре критериями вырабатывает рекомендацию по разрешению конфликтной ситуации путём маневрирования только в вертикальной плоскости. Рекомендации всегда основаны на принципе наименьшего отклонения своего самолёта от маршрута полёта с обеспечением безопасного расстояния между ВС (рис.2.1). 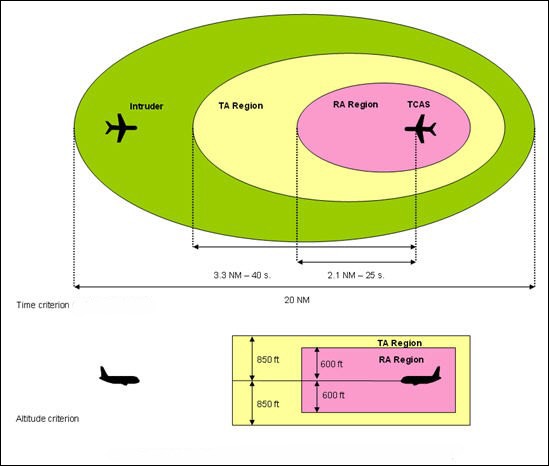 Рис. 2.1 Защищаемые зоны по расстоянию, высоте и времени. Время в секундах, расстояние в морских милях Принцип работы системы ADS – B: ADS-B расшифровывается как Automatic Dependent Surveillance — Broadcast (автоматическое зависимое наблюдение в режиме радиовещания). Режим радиовещания такой же, на котором работают обычные радио и телевизионные станции. Это новая технология системы передачи данных. На данный момент она активно внедряется в США, Европе и Австралии. В России поставлена задача по ее развертыванию в те же сроки, то есть 2015-2020 годы. Эта система позволяет видеть и оценивать воздушную обстановку с точностью гораздо большей, нежели системы, основанные на работе радаров, как первичных, так и вторичных (которой и является TCAS) [2]. Это гораздо более прогрессивный, так называемый метод безрадарного наблюдения. Суть этой системы заключается в том, что каждое воздушное судно (оборудованное системой ADS-B) ежесекундно самостоятельно, не дожидаясь запросов выдает по радиоканалу специфическую информацию о себе, в которую кроме указания своего местоположения (определяется с использованием системы GPS) входит высота, скорость, курс, направление движения по высоте (подъем, снижение), бортовой номер самолета и др. Приемники этой системы, которые очень просты и малогабаритны могут быть установлены где угодно: у диспетчера или же на борту воздушного судна. Они позволяют отображать на экране движение воздушных судов (причем как в воздухе, так и на земле). Воздушные суда и наземные станции могут принимать эту информацию примерно в радиусе 150 миль. Наземные станции комбинируют полученную информацию со сведениями, полученными от не ADS-B-устройств (наземных радаров) и снова ее ретранслируют для всех воздушных судов в радиусе своего обслуживания. По этому же каналу экипаж получает информацию о погоде, о зонах полетов, о наземной обстановке, то есть ту же информацию, что и диспетчер и к тому же минуя его. Получается, что пилоты и остальные участники движения получают гораздо больше информации «все видят всех». Объем информации очень полный, точный и своевременный, точнее даже с запасом времени, так как радиус возможного получения информации значительно больше, чем при использовании обычных систем (типа TCAS). Кроме того, оборудование ADS- B значительно легче, проще и дешевле, нежели традиционное, а информация общедоступна и бесплатна (рис.2.2). 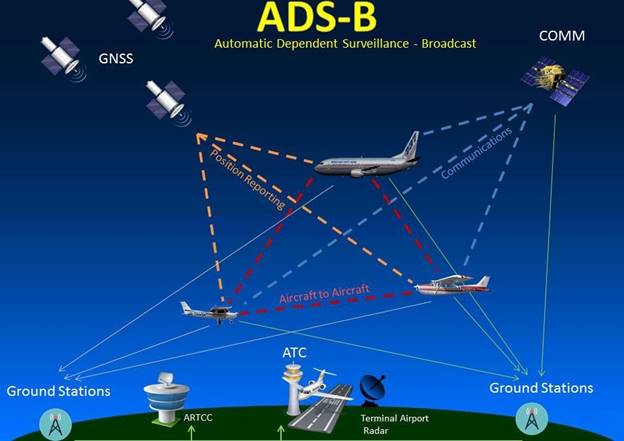 Рис. 2.2 Схема построения системы ADS-B Сравнение систем TCAS и ADS-B: 1. Для того чтобы определить, попадает ли самолет-нарушитель в “защищаемый объем” система TCAS должна опросить приемоответчик УВД и получить ответный сигнал. В то время как система ADS – B транслирует информацию о всех воздушных судах в радиупсе действия самостоятельно, без опроса. 2. TCAS вычисляет траекторию самолета-нарушителя, благодаря специальной логике, основываясь на данных, полученных от приемопередатчиков в различные промежутки времени. В то время как ADS – B получает информацию напрямую от многих участников движения без запроса, что облегчает построение траектории. 3. TCAS допрашивает транспондер на частоте 1030 МГц, и получает ответ на частоте 1090 МГц. ADS-B передает свою информацию также на частоте 1090 МГц. Таким образом TCAS может получать ответный сигнал ответчика УВД а также передатчиков ADS-B [3, c. 79-88]. В интегрированной системе наблюдения TCAS/ADS-B TCAS может получать информацию о положении и скорости цели напрямую из системы ADS-B (от бортовых и наземных станций), не осуществляя опроса транспондера. Это позволить уменьшить время срабатывания системы, снизить помехи, возникающие при опросе транспондера, повысить точность наблюдения, при этом не вмешиваясь в алгоритмы предотвращения столкновения TCAS. Более того, применение ADS-B в качестве источника информации для TCAS сможет увеличить общий радиус наблюдения до 150 миль. При этом разделить общую зону ответственности интегрированной системы TCAS/ADS-B можно на два “защищаемых объема”: объем системы TCAS и объем системы ADS-B. Разделение по такому принципу может установить новые границы для подачи предупреждений TA и рекомендаций RA. При этом появится больше времени для реакции пилота. Более того, появляется возможность отображать информацию о потенциально конфликтных целях на гораздо более информативном дисплее системы ADS-B CDTI (cockpit display of traffic information). Что позволит пилотам в реальном времени наблюдать за движением самолета-нарушителя (рис.3).  Рис.2.3 Пример CDTI (cockpit display of traffic information) Таким образом можно сделать вывод о том, что использование системы ADS-B в качестве источника информации для TCAS может значительно повысить безопасность полета. Интеграция этих двух систем в значительной степени снизит вероятность ошибки в условиях высокой плотности движения. Пилоты будут получать гораздо более полную информацию о характере движения близко летящих целей и об окружающем трафике в целом. За счет увеличения “защищаемого объема” отслеживание потенциально опасных целей будет начинаться раньше, что даст больше времени пилоту на совершения маневра, в случае возникновения угрозы столкновения. Вывод информации на CDTI предоставит возможность пилоту воспринять информацию о собственном положении своего ВС относительно других самолетов, визуализировать картину происходящего. Ограничения и алгоритм TCAS Компьютер TCAS получает информацию о курсе, танагже, барометрической и радиовысоте от систем своего самолета, затем он сравнивает свои данные с данными принятыми от «мешающего» самолета. Обрабатывает информацию и выдает команду на расхождение. TCAS передаёт и принимает только идентификацию борта в режиме ответчика S и барометрическую высоту по стандартному давлению (1013гПА) и отслеживает таким образом положение другого борта, просчитывая, а не случится ли при текущем положении вещей опасного сближения. Опрос в случае сближения бортов происходит раз в секунду, но несинхронизованно, так что до одного борта обычно чуть раньше доходит, что надо что-то делать. Он–то и принимает рещение, которое обычно простое — если ты выше, то идёшь выше (или сохраняешь высоту), если ниже — то наоборот. На конкретные детали (теоретически) может влиять вся доступная информация о своём борте. О принятом решении сообщается TCASу другого борта, который даёт противоположную команду своему экипажу и сообщает об этом первому TCASу. Если получилось так, что оба TCAS приняли одинаковое решение одновременно, то тот, у кого идентификатор режима S больше, подчиняется и меняет своё решение на противоположное. Алгоритм работы системы состоит из следующих этапов. 1. Оценка взаимного пространственного положения самолетов. TCAS определяет три параметра: относительную высоту, дальность и относительный пеленг (рисунок 6.1). Относительная высота определяется путем сравнения собственной высоты полета и высоты, получаемой от ответчика конфликтующего самолета. Дальность измеряется по времени запаздывания ответного сигнала, а относительный пеленг путем пеленгования ответчика. По результатам многократных измерений (время измерения около одной секунды) система отслеживает и прогнозирует траекторию полета самолета-нарушителя, вычисляет скорость изменения дальности и скорость изменения высоты. 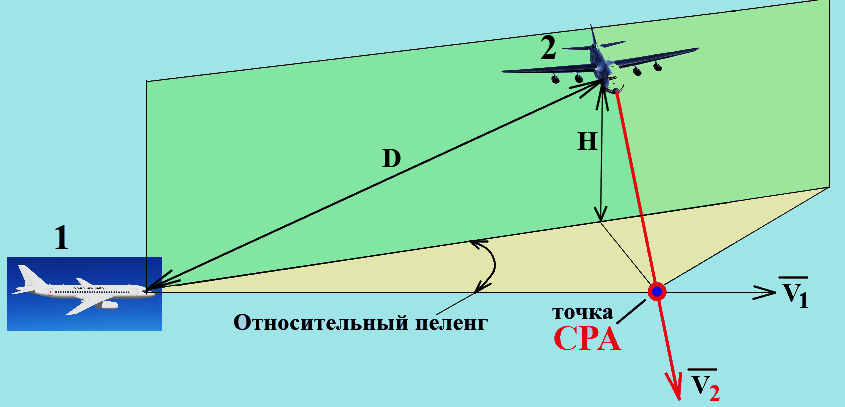 Рис.2.4 Измеряемые параметры конфликтующих самолетов 2. Вычисление времени взаимного сближения. Время полета τ СРА до момента наибольшего сближения (точка СРА - Closest Point of Approach)имеет две составляющие - по дальности и по высоте: а) время полета по дальности τ D рассчитывается путем деления расстояния D на скорость уменьшения дальности; б) время полета до достижения одинаковой высоты τH – делением значения относительной высоты H на скорость изменения высоты. Примечание: В системе TCAS 2000 предусмотрено, что в точке наибольшего сближения (CPA) между самолетами обеспечивается расстояние от 300 до 700 футов [3]. 3. Сравнение значений τ D и τH с пороговым значениемτ пз (тау «пороговое значение»). Вначале выполняется проверка дальности. Если оказывается, что τ D меньше порогового значения τ пз, то выполняется проверка высоты. Конфликтующий самолет объявляется нарушителем, если обе проверки показали, что и τ D и τH меньше τ пз. В том случае, когда сближение осуществляется с очень малой скоростью, учитываются критерии в виде зон защитной дистанции (DMOD) и защитной высоты (ZTHR) (рисунок 6.2). Значение времени τ пз и размеры защитных зон зависят не только от скорости сближения самолетов, но и от плотности воздушного движения, скороподъемности в различных высотных слоях, близости земной поверхности и др. факторов. Для учета факторов, в логическую программу предупреждения столкновений вводится параметр – уровень чувствительности SL (Sensitivity Level). Уровень чувствительности SL, пределы изменения которого от 1 до 7, может устанавливаться: - либо системой TCAS, в зависимости от высоты полета (SL от 2 до 7); - либо пилотом (SL = 1, 2); - либо радиолокатором ВОРЛ (SL от 2 до 6). Если в логической программе код уровня чувствительности соответствует параметру SL=1, это означает, что: - либо самолет в воздухе, но высота полета менее 380 футов; - либо самолет на земле; - либо система TCAS в режиме ожидания. В любом случае, система TCAS не передает запросы. Значение параметра SL=2 соответствует таким событиям: - самолет в воздухе, датчиком высоты является радиовысотомер, высота полета в пределах от 380 до 1000 футов, система TCAS может выдавать только сообщения TA; - пилотом установлен режим «только TA» («ТА ONLY»). Значения параметров SL стретьего по седьмой, определяют значения времени τ пз и размеры защитных зон DMOD, ZTHR (таблица 2.1 и рисунок 2.5). Значения SL выставляются в соответствии с высотой полета самолета. В зависимости от выставленного значения SL, устанавливаются значения времени предупреждения τ пз и размеры защитных зон. Пороговое значение τ пз для выдачи рекомендации RA устанавливается в диапазоне от 15 до 35 с, а ТА выдается за 20 с до выдачи RA [1]. Таким образом, чем больше высота полета, тем больше время заблаговременной выдачи сообщений экипажу и выше уровень обеспечиваемой защиты. Примечание: При SL=3, датчиком высоты является радиовысотомер. Таблица 2.1 – Пороговые значения выдачи сообщений [2] 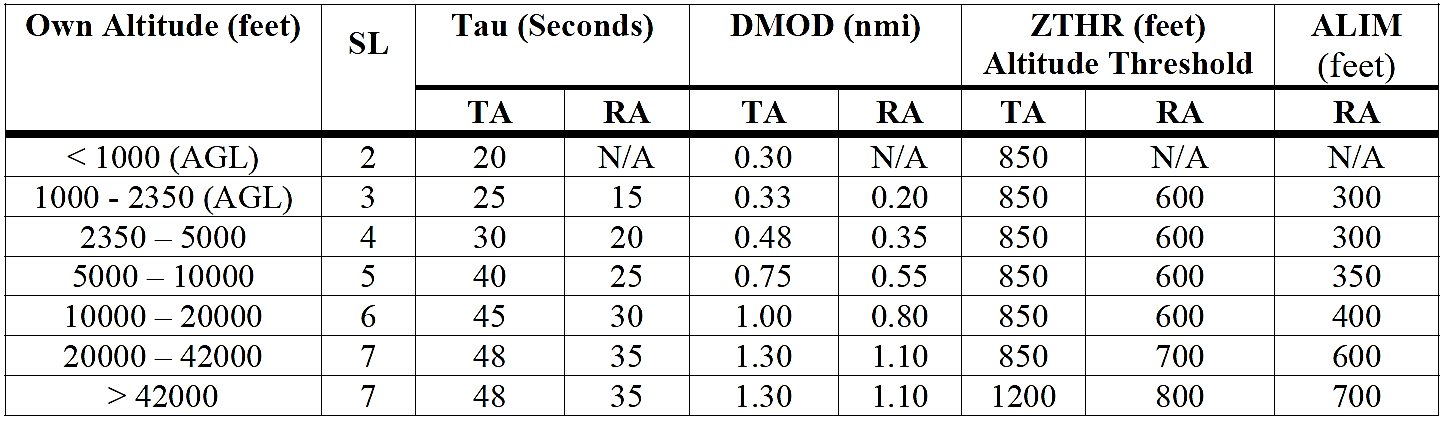 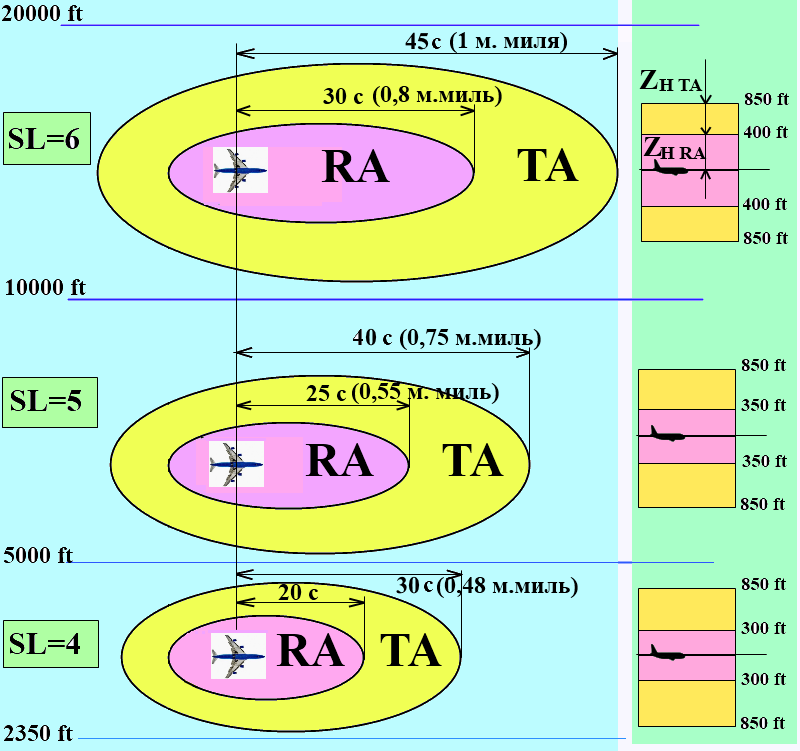 Рис.2.5 Размеры зон выдачи рекомендаций ТА и RA в зависимости от уровней чувствительности SL системы TCAS 2000 Основные эксплуатационные характеристики TCAS 1. Максимальная дальность обнаружения приемоответчиков S по сигналам всенаправленной передачи – 56 км или 30 м. миль. 2. Номинальная дальность действия с возможностью оценки степени угрозы (выдачи сообщений TA и RA) – 26 км или 14 м. миль. 3. Зона гарантированного отображения информации об угрозе: а) по дальности - 11 км или 6 м. миль; б) по высоте - ±370 м или ±1200 футов. 4. Количество одновременно отслеживаемых самолетов - 30. 5. Максимальная скорость сближения ВС, при котором обеспечивается надежное наблюдение – 2220 км/час. 6. Погрешность измерения дальности - ±14,5 м или ±50 футов. 7. Погрешность измерения пеленга – не более ±10°. Функционирование системы и отображение текущей информации на дисплее TCAS Основу системы TCAS представляет вычислительный блок – процессор. В состав процессора входит приемопередающее устройство, которое осуществляет запросы приемоответчиков А/С или S других самолетов, и прием их ответных сигналов (рисунок 2.6). 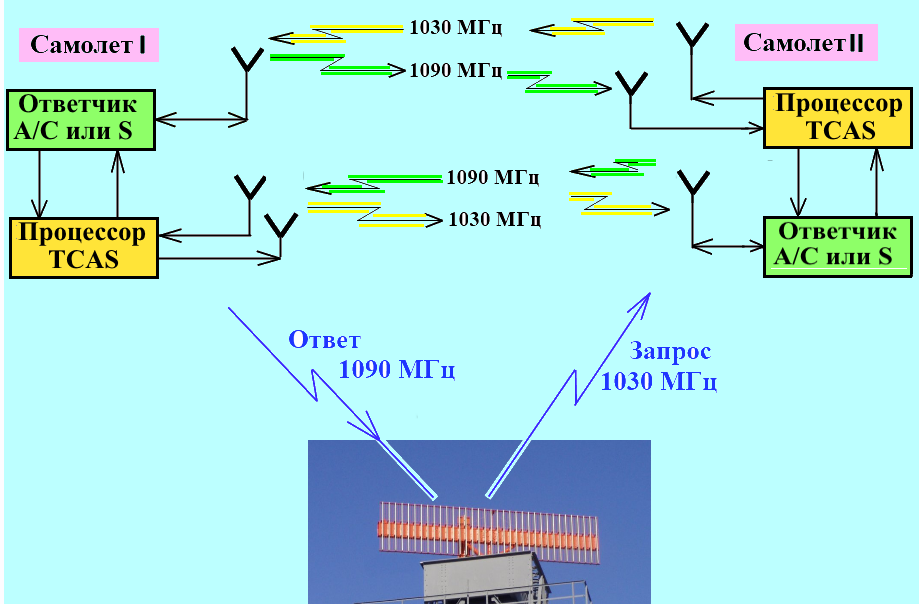 Рис.2.6 Радиоканалы передачи сигналов в БСПС Структура сигналов запроса и ответа, а также сама процедура сбора информации зависит от типа приемоответчика – S или А/С. Результаты прогнозирования сближений воздушных судов |