Всё о метрологии. Предмет и задачи метрологии Метрология наука об измерениях
 Скачать 435.9 Kb. Скачать 435.9 Kb.
|

|
4.2. Описание случайных погрешностей с помощью функций распределения Рассмотрим результат наблюдений Х за постоянной физической величиной Q как случайную величину, принимающую различные значения Z, в различных наблюдениях за ней. Значения Xi будем называть результатами отдельных наблюдений. Наиболее универсальный способ описания случайных величин заключается в отыскании их интегральных или дифференциальных функций распределения [1]. Под интегральной функцией распределения результатов наблюдений понимается зависимость вероятности того, что результат наблюдения Xi в i-м опыте окажется меньшим некоторого текущего значения х, от самой величины х: Fx(x) = P(Xi ≤ x) (4) Здесь и в дальнейшем большие буквы используются для обозначения случайных величин, а маленькие — значений, принимаемых случайными величинами. Поскольку функция распределения вероятности представляет собой вероятность, то она удовлетворяет следующим свойствам: • 0 ≤ Fx(x) ≤ 1 при x ∈ (–∞, +∞), • Fx(–∞) = 0, Fx(+∞) = 1, • Fx(x) — неубывающая функция x, • P(x1 < X < x2) = FX(x2) – FX(x1). На рис.2 показаны примеры функций распределения вероятности. 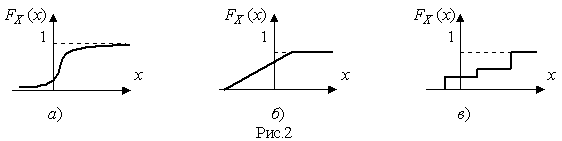 Более наглядным является описание свойств результатов наблюдений и случайных погрешностей с помощью дифференциальной функции распределения, иначе называемой плотностью распределения вероятностей: f(x) = dFX(x)/dx (5) Физический смысл f(x) состоит в том, что произведение f(x)dx представляет вероятность попадания случайной величины Х в интервал от х до х + dx , т.е. f(x)dx = P(x ≤ X ≤ x+dx) (6) Свойства плотности распределения вероятности: — вероятность достоверного события равна 1; иными словами, площадь, заключенная между кривой дифференциальной функции распределения и осью абсцисс, равна единице; — вероятность попадания случайной величины в интервал от x1 до x2. От дифференциальной функции распределения легко перейти к интегральной путем интегрирования: (7) Размерность плотности распределения вероятностей, как это следует из формулы (7), обратна размерности измеряемой величины, поскольку сама вероятность — величина безразмерная. Используя понятия функций распределения, легко получить выражения для вероятностей того, что результат наблюдений Х или случайная погрешность δ примет при проведении измерения некоторое значение в интервале [x1, x2] или [δ1, δ2]. В терминах интегральной функции распределения имеем: P(x1 < X ≤ x2) = P{-∞ < X ≤ x2} – P{-∞ < X ≤ x1} = Fx(x2) – Fx(x1) P(δ1 < δ ≤ δ2) = P{-∞ < δ ≤ δ2} – P{-∞ < δ ≤ δ1} = Fδ(δ2) – Fδ(δ1) т.е. вероятность попадания результата наблюдений или случайной погрешности в заданный интервал равна разности значений функции распределения на границах этого интервала. Заменяя в полученных формулах интегральные функции распределения на соответствующие плотности распределения вероятностей согласно выражению (7), получим формулы для искомой вероятности в терминах дифференциальной функции распределения:  (8) (8) (9) (9)Таким образом, вероятность попадания результата наблюдения или случайной погрешности в заданный полуоткрытый интервал равна площади, ограниченной кривой распределения, осью абсцисс и перпендикулярами к ней на границах этого интервала. Необходимо отметить, что результаты наблюдений в значительной степени сконцентрированы вокруг истинного значения измеряемой величины и по мере приближения к нему элементы вероятности их появления возрастают. Это дает основание принять за оценку истинного значения измеряемой величины координату центра тяжести фигуры, образованной осью абсцисс и кривой распределения, и называемую математическим ожиданием результатов наблюдений: (10) В заключение можно дать более строгое определение постоянной систематической и случайной погрешностей. Систематической постоянной погрешностью называется отклонение математического ожидания результатов наблюдений от истинного значения измеряемой величины: θ = M[X] – Q (11) а случайной погрешностью — разность между результатом единичного наблюдения и математическим ожиданием результатов δ = X – M[X] (12) В этих обозначениях истинное значение измеряемой величины составляет Q = X – θ – δ (13) 4.3. Моменты случайных погрешностей Функция распределения является самым универсальным способом описания поведения случайных погрешностей. Однако для определения функций распределения необходимо проведение весьма кропотливых научных исследований и обширных вычислительных работ. Поэтому к такому способу описания случайных погрешностей прибегают иногда при исследовании принципиально новых мер и измерительных приборов. Значительно чаще бывает достаточно охарактеризовать случайные погрешности с помощью ограниченного числа специальных величин, называемых моментами [3]. Начальным моментом n-го порядка результатов наблюдений называется интеграл вида  (14) (14)представляющий собой математическое ожидание степени Xn. При n=1 (15) т.е. первый начальный момент совпадает с математическим ожиданием результатов измерений. Центральным моментом n-го порядка результатов наблюдений называется интеграл вида  (16) (16)Вычислим первый центральный момент:  (17) (17)Таким образом, первый центральный момент результатов наблюдений равен нулю. Важно отметить, что начальные и центральные моменты случайных погрешностей совпадают между собой и с центральными моментами результатов наблюдений, поскольку математическое ожидание случайных погрешностей равно нулю. Особое значение наряду с математическим ожиданием результатов наблюдений имеет второй центральный момент, называемый дисперсией результатов наблюдений. При n=2  (18) (18)Дисперсия D[X] случайной погрешности равна дисперсии результатов наблюдений и является характеристикой их рассеивания относительно математического ожидания. Если математическое ожидание результатов наблюдений можно рассматривать в механической интерпретации как абсциссу центра тяжести фигуры, заключенной между кривой распределения и осью Ох, то дисперсия является аналогом момента инерции этой фигуры относительно вертикальной оси, проходящей через центр тяжести. Дисперсия имеет размерность квадрата измеряемой величины, поэтому она не совсем удобна в качестве характеристики рассеивания. Значительно чаще в качестве последней используется положительное значение корня квадратного из дисперсии, называемое средним квадратическим отклонением результатов наблюдений: (19) С помощью среднеквадратического отклонения можно оценить вероятность того, что при однократном наблюдении случайная погрешность по абсолютной величине не превзойдет некоторой наперед заданной величины ε, т.е. вероятность P{|δ|}<ε. Для этого рассмотрим формулу, известную как неравенство Чебышева: или (20) Полагая ε=3σX, можно найти вероятность того, что результат однократного наблюдения отличается от истинного значения на величину, большую утроенного среднеквадратического отклонения, т.е. вероятность того, что случайная погрешность окажется больше 3σX: 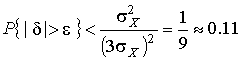 Вероятность того, что погрешность измерения не превысит 3σX, составит соответственно P{|δ|<ε} ≥ 1–0.11 = 0.89 Неравенство Чебышева дает только нижнюю границу для вероятности P{|δ|}<ε, меньше которой она не может быть ни при каком распределении. Обычно P{|δ|}<3σ значительно больше 0.89. Так, например, в случае нормального распределения погрешностей эта вероятность составляет 0.9973. Математическое ожидание и дисперсия являются наиболее часто применяемыми моментами, поскольку они определяют наиболее важные черты распределения: положение центра распределения и степень его разбросанности. Для более подробного описания распределения используются моменты более высоких порядков. Третий момент случайных погрешностей служит характеристикой асимметрии, или скошенности распределения. В общем случае любой нечетный момент случайной погрешности характеризует асимметрию распределения. Действительно, если распределение обладает свойством симметрии, то все функции вида δspδ(δ), где s = 1, 3, 5…, являются нечетными функциями δ (рис.3). Поэтому все нечетные моменты, являющиеся интегралами этих функций в бесконечных пределах, должны равняться нулю. Отличие этих моментов от нуля как раз и указывает на асимметрию распределения. Простейшим из нечетных моментов является третий момент μ3[δ]. Чтобы получить безразмерную характеристику, третий момент делят на третью степень среднеквадратического отклонения и получают коэффициент асимметрии, или просто асимметрию Sk распределения: (21) 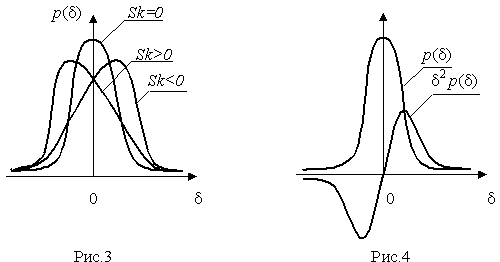 Для иллюстрации сказанного на рис. 4 приведены три кривые распределения случайных погрешностей с положительной, отрицательной и нулевой асимметрией. Четвертый момент служит для характеристики плосковершинности или островершинности распределения случайных погрешностей. Эти свойства описываются с помощью эксцесса — безразмерной характеристики, определяемой выражением (22) Число 3 вычитают из отношения потому, что для широко распространенного нормального распределения погрешностей μ4[δ]=3σ4x. Таким образом, для нормального распределения эксцесс равен нулю, более плосковершинные распределения обладают отрицательным эксцессом, более островершинные — положительным (рис.5). 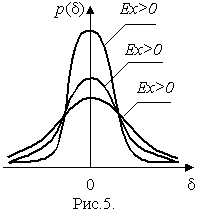 4.4. Виды распределения результатов наблюдения и случайных погрешностей Случайная погрешность измерения образуется под влиянием большого числа факторов, сопутствующих процессу измерения. В каждой конкретной ситуации работает свой механизм образования погрешности. Поэтому естественно предположить, что каждой ситуации должен соответствовать свой тип распределения погрешности. Однако во многих случаях имеются возможности еще до проведения измерений сделать некоторые предположения о форме функции распределения, так что после проведения измерений остается только определить значения некоторых параметров, входящих в выражение для предполагаемой функции распределения. Случайная погрешность характеризует неопределенность наших знаний об истинном значении измеряемой величины, полученных в результате проведенных наблюдений. Согласно К. Шеннону мерой неопределенности ситуации, описываемой случайной величиной X, является энтропия [4] являющаяся функционалом дифференциальной функции распределения pX(x). Можно предположить, что любой процесс измерения формируется таким образом, что неопределенность результата наблюдений оказывается наибольшей в некоторых пределах, определяемых допускаемыми значениями погрешности. Поэтому наиболее вероятными должны быть такие распределения pX(x), при которых энтропия обращается в максимум. Для выявления вида наиболее вероятных распределений рассмотрим несколько наиболее типичных случаев [3]. 1. В классе распределений результатов наблюдений pX(x), обладающих определенной зоной рассеивания между значениями х = b и х = а шириной b-а=2а, найдем такое, которое обращает в максимум энтропию при наличии ограничивающих условий: pX(x) > 0, , , где — математическое ожидание результатов наблюдений. Решение поставленной задачи находится методом множителей Лагранжа. Искомая плотность распределения результатов наблюдений описывается выражением 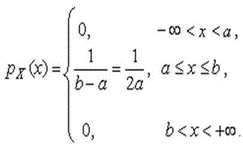 (23) (23)Такое распределение результатов наблюдений называется равномерным. Значения дифференциальной функции распределения равномерной распределенной случайной погрешности постоянны в интервале [–а; +а], а вне этого интервала равны нулю (рис.6). 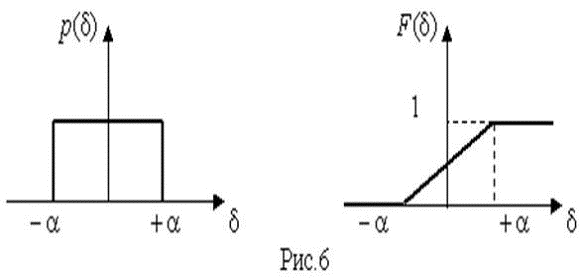 Поэтому выражение для дифференциальной функции распределения случайной погрешности можно записать в виде 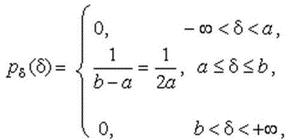 (24) (24)Определим числовые характеристики равномерного распределения. Математическое ожидание случайной погрешности находим по формуле (10):  Дисперсию случайной равномерно распределенной погрешности можно найти по формуле (18):  В силу симметрии распределения относительно математического ожидания коэффициент асимметрии должен равняться нулю:  Для определения эксцесса найдем вначале четвертый момент случайной погрешности:  поэтому В заключение найдем вероятность попадания случайной погрешности в заданный интервал [δ1, δ2], равный заштрихованной площади на рис. 7. 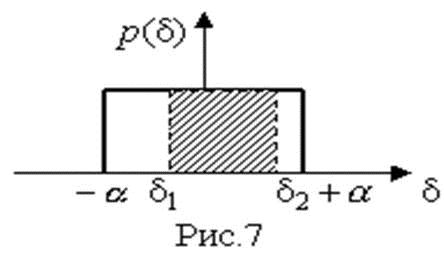 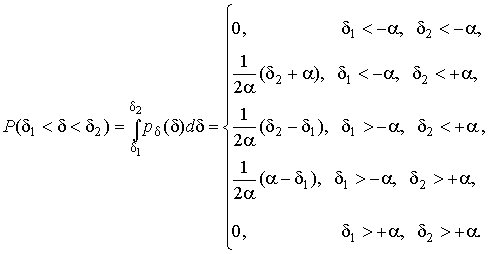 2. В классе распределений результатов наблюдений pX(x), обладающих определенной дисперсией σ²X, найдем такое, которое обращает в максимум энтропию при наличии ограничений: pX(x) > 0, , , . Решение этой задачи также находится методом множителей Лагранжа. Искомая плотность распределения результатов наблюдений описывается выражением 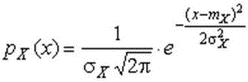 (25) (25)где mX — математическое ожидание и σ²X — среднеквадратическое отклонение результатов наблюдений. Учитывая, что при полном исключении систематических погрешностей x–mX=δ и σX=σδ, для дифференциальной функции распределения случайной погрешности можно записать уравнение (25) Распределение, описываемое уравнениями (25) и (26), называется нормальным или распределением Гаусса. На рис.8 изображены кривые нормального распределения случайных погрешностей для различных значений среднеквадратического отклонения (σ1 > σ2 > σ3). 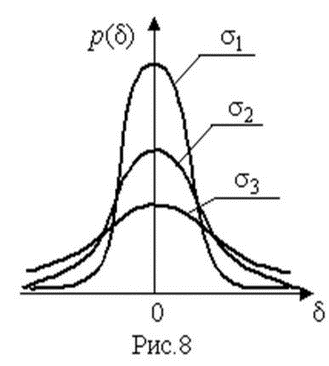 Из рисунка видно, что по мере увеличения среднеквадратического отклонения распределение все более и более расплывается, вероятность появления больших значений погрешностей возрастает, а вероятность меньших погрешностей сокращается, т.е. увеличивается рассеивание результатов наблюдений. Вычислим вероятность попадания результата наблюдения в некоторый заданный интервал (x1, x2]:  Заменим переменные:  после чего получим следующее выражение для искомой вероятности:  Интегралы, стоящие в квадратных скобках, не выражаются в элементарных функциях, поэтому их вычисляют с помощью так называемого нормированного нормального распределения с дифференциальной функцией (27) В приложении (табл. П. 5 и П. 6) приведены значения дифференциальной функции нормированного нормального распределения, а также интегральной функции этого распределения, определяемой как (28) С помощью функции Ф(z) вероятность P(x1 < X ≤ x2) находят как  (29) (29)При использовании данной формулы следует иметь в виду тождество Φ(z) ≡ 1-Φ(–z) вытекающее непосредственно из определения функции Ф(z). Широкое распространение нормального распределения погрешностей в практике измерений объясняется центральной предельной теоремой теории вероятностей, являющейся одной из самых замечательных математических теорем, в разработке которой принимали участие многие крупнейшие математики — Муавр, Лаплас, Гаусс, Чебышев и Ляпунов. Центральная предельная теорема утверждает, что распределение случайных погрешностей будет близко в нормальному всякий раз, когда результаты наблюдения формируются под влиянием большого числа независимо действующих факторов, каждый из которых оказывает лишь незначительное действие по сравнению с суммарным действием всех остальных. 3. Предположим, что результаты наблюдений распределены нормально, но их среднеквадратическое отклонение является величиной случайной, изменяющейся от опыта к опыту. Такое предположение более осторожное, чем предположение о неизменности σX в течение всего времени измерений. В этом случае, рассуждая таким же образом, как и прежде, легко найти, что энтропия обращается в максимум, если результаты наблюдений имеют распределение Лапласа с плотностью (30) где mX — математическое ожидание, σX — среднеквадратическое отклонение результатов наблюдения. Распределением Лапласа следует пользоваться в тех случаях, когда точностные характеристики заранее неизвестны или нестабильны во времени. Дифференциальная функция распределения случайных погрешностей получается подстановкой δ=x-mX и σX=σδ в выражение (30): Асимметрия распределения равна нулю, поскольку распределение симметрично относительно нуля, а эксцесс в соответствии с формулой (22) составляет  Таким образом, по сравнению с нормальным распределением (Ех = 0) равномерное распределение является более плосковершинным (Ех = -1.2), а распределение Лапласа — более островершинным (Ех = 3). |