Метрология. Лекц Метрология. Предмет и задачи метрологии
 Скачать 1.64 Mb. Скачать 1.64 Mb.
|

11.3. Динамические характеристики и параметрысредств измеренийВ статических режимах выходной сигнал СИ в точности соответствует входному (при условии отсутствия статических погрешностей) и, следовательно, коэффициент преобразования К равен номинальному коэффициенту К0 во всем диапазоне изменения входной величины X(t). Уравнение преобразования имеет вид  (11.2) (11.2)и соответствует идеальному безынерционному линейному преобразованию. Реальные СИ обладают инерционными (динамическими) свойствами, обусловленными особенностями используемых элементов. Это приводит к более сложной зависимости между входным и выходным сигналами. Свойства СИ в динамических режимах, т.е. когда время изменения измеряемой величины сравнимо со временем измерения, описываются совокупностью так называемых динамических характеристик. Основной их них является полная динамическая характеристика, полностью описывающая принятую математическую модель динамических свойств СИ. В качестве нее используют: дифференциальные уравнения; переходную, импульсную переходную, амплитудно-фазовую и амплитудно-частотную характеристики; совокупность амплитудно-частотной и фазочастотной характеристик; передаточную функцию. Дифференциальные уравнения наиболее полно описывают динамические свойства СИ. Общий вид уравнения с нулевыми начальными условиями:  где bi, Ki — постоянные коэффициенты. В подавляющем большинстве случаев оно может быть приведено к уравнению  Его решение Y(t) описывает выходной сигнал средства измерений при входном сигнале X(t). Данное уравнение отличается от (11.2) присутствием членов, содержащих произведения коэффициентов Ц и высших производных от Y(t), которые и описывают динамические свойства СИ. При их равенстве нулю уравнение (11.3) переходит в (11.2). Порядок уравнения (11.3) бывает довольно высоким, по крайней мере выше второго. Его решение даже при известном виде функции Y(t) весьма затруднено. Кроме того, неизвестно аналитическое выражение для Y(t) и определение производных невозможно. Дифференциальные уравнения высокого порядка могут быть представлены системой дифференциальных уравнений первого и второго порядков. Это, по существу, означает представление сложного в динамическом смысле СИ совокупностью более простых, хорошо изученных динамических элементов (нулевого, первого и второго порядков). Элемент нулевого порядка описывается уравнением (11.2), динамический элемент первого порядка — уравнением  (11.4) (11.4)где Т — постоянная времени. Вместо нее применяют и величину г=1/Т, называемую граничной частотой. Динамический элемент второго порядка описывается уравнением  (11.5) (11.5)где 0 — частота собственных колебаний; — коэффициент демпфирования, или степень успокоения. Переходная характеристика h(t) — это временная характеристика СИ, полученная в результате подачи на его вход сигнала в виде единичной функции заданной амплитуды X(t) = Хml(t). Она описывает инерционность СИ, обуславливающую запаздывание и искажение выходного сигнала относительно входного. Переходную характеристику находят либо опытным путем, либо решая соответствующее дифференциальное уравнение при Импульсная переходная характеристика g(t) — это временная характеристика СИ, полученная в результате приложения к его входу сигнала в виде дельта-функции. Переходная и импульсная характеристики связаны между собой:  Как и дифференциальное уравнение, эти характеристики в полной мере определяют динамические свойства СИ. Выходной сигнал при известном входном X(t) определяют с помощью интеграла Дюамеля:  Переходная и импульсная характеристики элементов первого порядка имеют вид:  Их графики приведены на рис. 11.4. Там же показан графический способ определения постоянных времени Т путем проведения касательных к точке начала процесса. Часто для оценки длительности переходного периода определяют время установления ty (см. рис. 11.4). Для динамического элемента второго порядка вид характеристик h(t) и g(t) зависит от коэффициента демпфирования (рис. 11.5 и 11.6). Имеют место три режима (считается, что Хm = 1): • колебательный при < 1  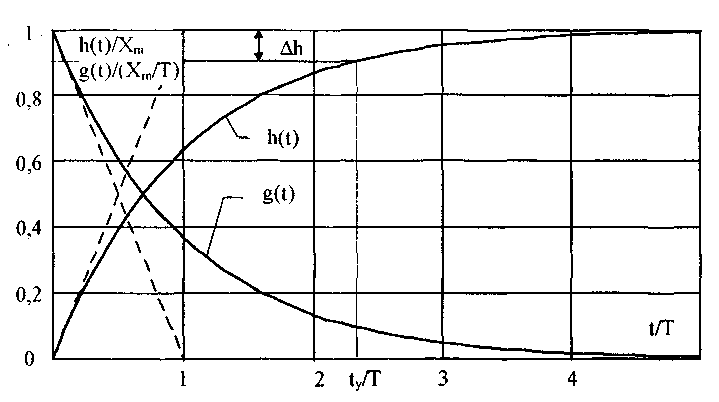 Рис. 11.4. Переходная и импульсная переходная характеристики динамических элементов первого порядка (К0= 1) • критический при = 1  • апериодический при > 1  Критический режим является граничным между колебательным и апериодическим. Он характерен тем, что переходный процесс наиболее быстро стремится к установившемуся значению. 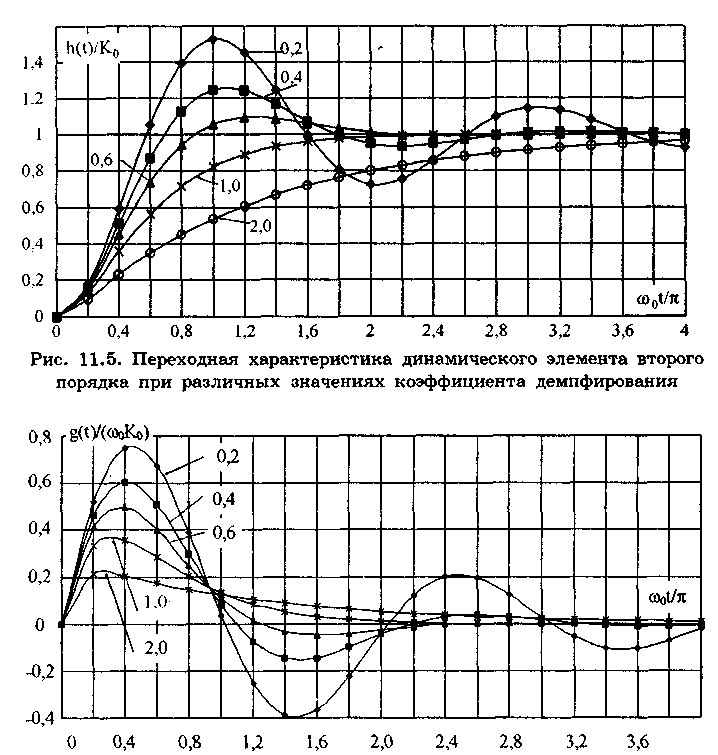 Рис. 11.6. Импульсная переходная характеристика динамического элемента второго порядка при различных значениях коэффициента демпфирования К частотным характеристикам относятся амплитудно-фазовая G(j), амплитудно-частотная A() и фазочастотная () характеристики. Частотные методы анализа основаны на исследовании прохождения гармонических колебаний различных частот через СИ. Если на вход линейного СИ подать входной сигнал X(j)=Xm() ejt, то выходной сигнал можно записать в виде Амплитудно-фазовой характеристикой называют отношение 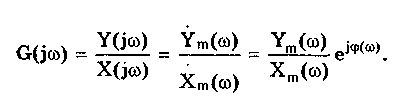 Она описывает изменение показаний СИ при изменении частоты входного сигнала и характеризует только установившийся режим его работы. В практике измерений получила большое распространение амплитудно-частотная характеристика (АЧХ) представляющая собой зависящее от круговой частоты отношение амплитуды выходного сигнала линейного СИ в установившемся режиме к амплитуде входного синусоидального сигнала. Фазочастотная характеристика (ФЧХ) () — это зависящая от частоты разность фаз между выходным сигналом и входным синусоидальным сигналом линейного СИ в установившемся режиме. Идеальный безынерционный элемент, описываемый уравнением (11.2), имеет следующие частотные характеристики: G(j) = К0, А() = К0, () = 0. Для элемента первого порядка (рис. 11.7), задаваемого уравнением (11.4), 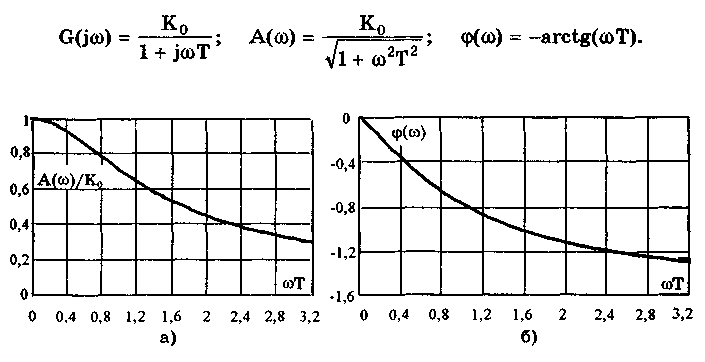 Рис. 11.7. Амплитудно-частотная (а) и фазочастотная (б) характеристики динамического элемента первого порядка Динамический элемент второго порядка, описываемый уравнением (11.5), имеет следующие частотные характеристики: 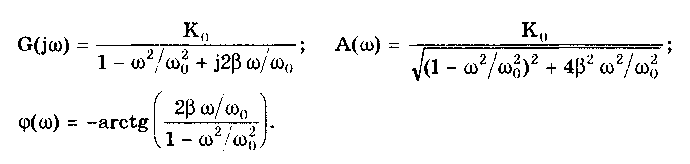 Для него вид частотных характеристик существенно зависит от коэффициента демпфирования (рис. 11.8). При = 0,6...0,7 в А() К0. Этот режим важен для многих практических применений таких элементов. При < 0,6 наблюдаются резонансные явления для частот, близких к 0. 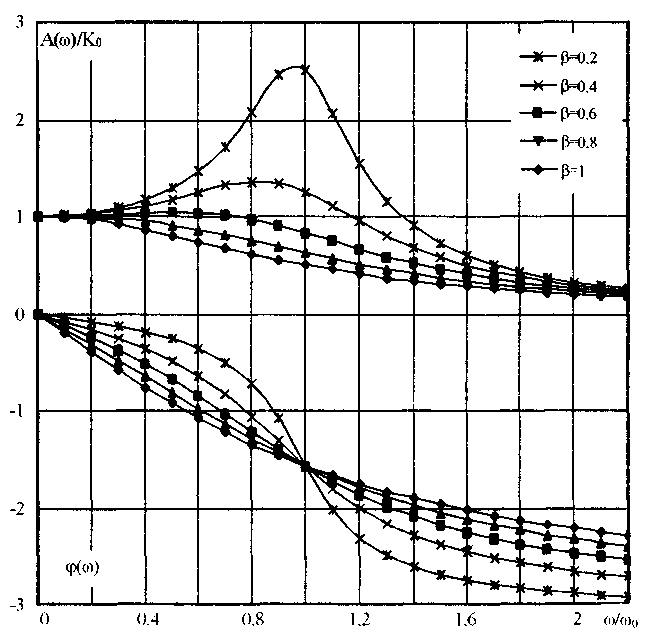 Рис. 11.8. Амплитудно-частотная и фазочастотная характеристики динамического элемента второго порядка относительно широком диапазоне частот Ясная физическая интерпретация и относительная простота экспериментального определения послужили причиной широкого применения частотных характеристик в метрологии. Частотные характеристики СИ связаны с другими его динамическими характеристиками следующими соотношениями:  На рис, 11.9 показана типичная для электронного вольтметра и аналогового осциллографа АЧХ. Если вольтметр предназначен для измерения и постоянного и переменного напряжения (а осциллограф работает при "открытом" входе), то АЧХ начинается с нулевой частоты (кривая 1) и продолжается до некоторой граничной частоты гр, после которой происходит ее существенный спад. У вольтметров переменного тока и осциллографов с "закрытым" входом АЧХ при нулевой частоте равна нулю, а затем с ростом частоты достигает (кривая 2) установившегося значения Аm. 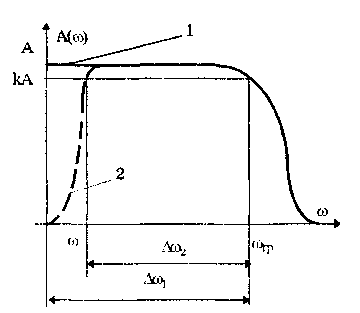 Рис. 11.9. Амплитудно-частотная характеристика электронного вольтметра, предназначенного для измерения постоянного и переменного напряжения (1) и только переменного напряжения (2) Соответствующий граничной частоте гр уровень kAm (k < 1), до которого спад АЧХ считается допустимым, у различных устройств задается по-разному. Характер изменения зависимости А() при частотах, больших граничной гр, также существенно зависит от технической реализации СИ. Полоса частот 1, (или 2) (см. рис. 11.9), в которой АЧХ средства измерений изменяется не более чем на наперед заданную величину, напряжения называется его полосой пропускания. Она является важной частной динамической характеристикой СИ. Часто вместо полосы пропускания указывают начальную н и граничную гр частоты. Так, для электронного аналогового вольтметра переменного тока марки ВЗ-38Б полоса частот простирается от 20 Гц до 5 МГц. Для широкополосного осциллографа марки С1-108 полоса пропускания составляет 350 МГц. Передаточная функция G(p) — это отношение преобразования Лапласа выходного сигнала СИ к преобразованию Лапласа входного сигнала при нулевых начальных условиях. Уравнение (11.3) можно записать в виде где Х(р), Y(p) — изображения по Лапласу входного и выходного сигналов СИ. Их отношение является передаточной функцией  Идеальный безынерционный элемент (11.2) имеет передаточную характеристику G(p)=K0; элемент первого порядка (11.4) G(p)=K0/(Tp+l); элемент второго порядка (11.5) G(p) = К0/( р2/20 + 2 р/0 + 1). Кроме полных характеристик часто используются частные, представляющие собой функционал или параметр полной динамической характеристики. К ним относятся: время реакции, неравномерность АЧХ, время нарастания переходной характеристики и ряд других. Терминология динамических измерений приведена в рекомендациях МИ 1951-88. |