Ответы на экзаменационные вопросы МДК 01.01. Принцип работы асинхронного двигателя
 Скачать 319.92 Kb. Скачать 319.92 Kb.
|

100 раз в секунду, а этому мешает трение, что приводит к запаздыванию, выделению тепла и к гудению магнитопровода.Принцип работы асинхронного двигателя. Устройство асинхронного двигателя с короткозамкнутым ротором. Устройство асинхронного двигателя с фазным ротором. Опыт холостого хода асинхронного двигателя. Опыт короткого замыкания асинхронного двигателя. Потери и КПД асинхронного двигателя. Скольжение асинхронного двигателя. Таким образом, в статоре магнитные потери больше чем в роторе, так как в статоре частота 50 Гц, а в роторе 2-5 Гц. Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами и сопротивления, пересчитанного на рабочую температуру, так как при нагреве сопротивление возрастает. Работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе. В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрические потери в щеточном контакте. Механические потери — это потери на трение в подшипниках и на вентиляцию. В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора. Механические потери зависят от скорости вращения ротора. Добавочные потери включают в себя все виды трудно учитываемых потерь (действие гармоник МДС, пульсацией магнитной индукции в зубцах и др.). Постоянными потерями являются магнитные и добавочные (имеется расхождение с тетрадью и учебником. В учебнике они как переменные потери), а переменными электрические, так как зависят от нагрузки на двигатель. Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства - экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях. охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности. КПД зависит от отношения потребляемой мощности к подаваемой. Скольжение - величина, характеризующая разность частот вращения ротора и вращающегося поля статора. с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2 уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением. Для асинхронных двигателей общего назначения Sном = 1+8%, при этом для двигателей большой мощности Sном = 1 %, а для двигателей малой мощности Sном = 8%. (стр. 162) Механическая характеристика асинхронного двигателя. 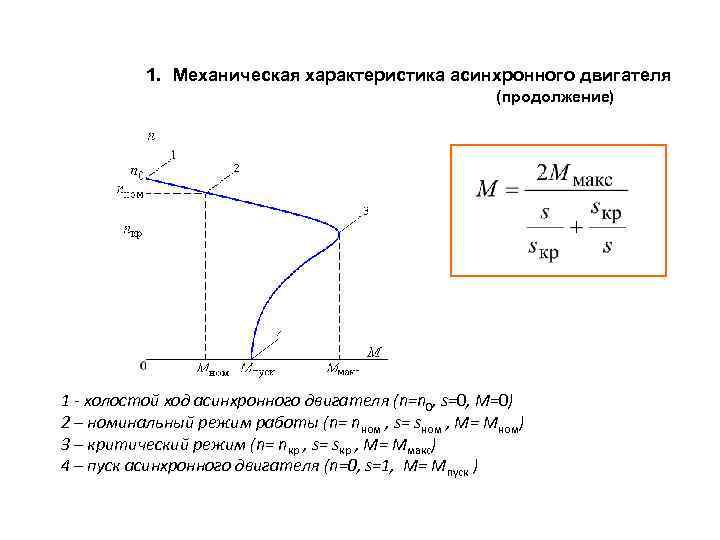 Ток в статоре максимален, так как при пуске ротор не подвижен и ток в роторе также максимален. При этом пусковой момент не велик, так как ток, наведенный в роторе, имеет в это время большую частоту, что порождает реактивное сопротивление. Из этого следует, что ток в роторе имеет реактивный характер. Когда ротор раскрутится, то частота тока в нем уменьшится, ток станет активным (преимущественно), то есть совершающим полезную работу, поэтому ток становится пропорционален моменту (т. 3,2,1). Холостой ход двигателя: здесь ток почти равен 0, так как расходуется только на намагничивание и вращение идет без нагрузки. На рабочей части характеристики видно, что при увеличении нагрузки скорость вращения ротора уменьшается, и при повышении критического момента он опрокидывается, то есть останавливается и переходит в режим короткого замыкания. Рабочий процесс асинхронного двигателя. Обмотка ротора не имеет электрической связи с обмоткой статора. Между этими обмотками существует только магнитная связь, и энергия из обмотки статора передается в обмотку ротора магнитным полем. В этом отношении обмотка статора является первичной, а обмотка ротора - вторичной. В процессе работы асинхронного двигателя токи в обмотках статора и ротора создают две магнитодвижущие силы: МДС статора и МДС ротора. Совместным действием эти МДС наводят в магнитной системе двигателя результирующий магнитный поток, вращающийся относительно статора с синхронной частотой вращения n1. Этот магнитный поток состоит из основного потока, сцепленного как с обмоткой статора, так и с обмоткой ротора (магнитный поток взаимоиндукции). Рассмотрим: какие ЭДС наводят указанные потоки в обмотках двигателя. В обмотке статора основной магнитный поток, вращающийся с частотой статора, наводит в неподвижной обмотке ЭДС, также как и в роторе. (стр. 154) Виды пуска асинхронных двигателей. Пусковые токи и их вредное воздействие. Прямой пуск (короткозамкнутый ротор). Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5-7 раз превышающий номинальный ток двигателя. С учетом конструкции механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Пуск с применением пусковых реостатов (фазный ротор). С помощью контактных колец к обмотке ротора подключается пусковой реостат. Он создает дополнительное активное сопротивление, что снижает ток в роторе на время пуска. Когда двигатель выходит на номинальный режим, пусковой реостат отключают. Обеспечивается наиболее благоприятное соотношение между пусковым моментом и пусковым током: большой пусковой момент при небольшом пусковом токе (в 2-3 раза больше номинального). Недостатками пусковых свойств двигателей с фазным ротором являются некоторая сложность, продолжительность и неэкономичность пусковой операции. Последнее вызывается необходимостью применения в схеме двигателя пускового реостата и непроизводительным расходом электроэнергии при его нагреве. Пуск с помощью устройства плавного пуска. В основе принципа работы лежат тиристоры – от величин тока, подаваемого на их управляющий электрод, будет зависеть то, при каком напряжении они будут открываться, и сколько напряжения попадет на двигатель. То есть можно увеличивать время пуска в любых диапазонах изменением скорости нарастания питающего напряжения (при этом, чтобы обеспечить толчок, на доли секунд на двигатель подается полное напряжение). Так как пусковой момент зависит от напряжения, для очень тяжелых пусков УПП не всегда подходит, а в остальном такой способ применяется в настоящее время повсеместно. Также схема предусматривает защиту полупроводников реактором для ограничения импульсных напряжений. УПП работает только во время пуска, далее питание на двигатель идет через обходной выключатель, что связано с высокой чувствительностью тиристоров. Реактор – это большие катушки индуктивности, также используются в сетях высокого напряжения для защиты от короткого замыкания, за счет ЭДС самоиндукции они гасят любые резкие изменения тока, но не влияют на стабильную синусоиду. Пуск понижением питающего напряжения (переключение с звезды на треугольник). В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. Ток в фазных обмотках двигателя уменьшается в  раз. Переключив обмотки статора, линейный ток уменьшается в 3 раза. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель переводится в положение треугольник и фазные обмотки двигателя оказываются под номинальным напряжением. раз. Переключив обмотки статора, линейный ток уменьшается в 3 раза. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель переводится в положение треугольник и фазные обмотки двигателя оказываются под номинальным напряжением. Рассмотренный способ пуска имеет существенный недостаток - уменьшение фазного напряжения в  раз сопровождается уменьшением пускового момента в три раза. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу. раз сопровождается уменьшением пускового момента в три раза. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.Пусковые токи двигателя являются большими из-за того, что во время пуска ротор неподвижен, из-за чего магнитное поле статора пересекает его с большой частотой. Это приводит к тому, что наводимый в роторе ток, по правилу Ленца, вызывает возрастание тока в статоре двигателя. Пусковой же момент в двигателе очень мал, так как наведенный в роторе пусковой ток, из-за большой частоты, имеет индуктивный характер. Когда двигатель раскручивается, индуктивное сопротивление уменьшается, и вместе с ним уменьшается ток из-за того, что скольжение а.д. понижается до 5%. Если не уменьшать пусковые токи при пуске, их обмотки будут перегреваться, а в сети будут возникать просадки напряжения. (стр. 193, 196) Пуск а.д. понижением питающего напряжения. Описание способа, его достоинства и недостатки. В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. Ток в фазных обмотках двигателя уменьшается в раз. Переключив обмотки статора, линейный ток уменьшается в 3 раза. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель переводится в положение треугольник и фазные обмотки двигателя оказываются под номинальным напряжением. Рассмотренный способ пуска имеет существенный недостаток - уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.Достоинства: уменьшение пусковых токов при пуске. Недостатки: уменьшается пусковой момент, не получится запустить с значительной нагрузкой на валу, объемность конструкции по сравнению с аналогами. 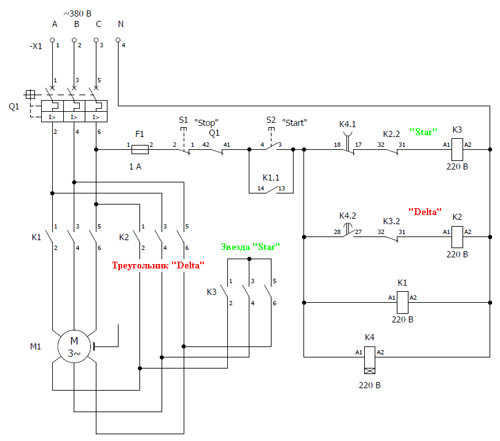 (стр. 196) Пуск а.д. с помощью устройства плавного пуска. Описание способа, его достоинства и недостатки. В основе принципа работы лежат тиристоры – от величин тока, подаваемого на их управляющий электрод, будет зависеть то, при каком напряжении они будут открываться, и сколько напряжения попадет на двигатель. То есть можно увеличивать время пуска в любых диапазонах изменением скорости нарастания питающего напряжения (при этом, чтобы обеспечить толчок, на доли секунд на двигатель подается полное напряжение). Так как пусковой момент зависит от напряжения, для очень тяжелых пусков УПП не всегда подходит, а в остальном такой способ применяется в настоящее время повсеместно. Также схема предусматривает защиту полупроводников реактором для ограничения импульсных напряжений. УПП работает только во время пуска, далее питание на двигатель идет через обходной выключатель, что связано с высокой чувствительностью тиристоров. Реактор – это большие катушки индуктивности, также используются в сетях высокого напряжения для защиты от короткого замыкания, за счет ЭДС самоиндукции они гасят любые резкие изменения тока, но не влияют на стабильную синусоиду. Достоинства: уменьшение пусковых токов, возможность контролировать время пуска. Недостатки: чувствительность тиристоров, не всегда подходит для тяжелого пуска. Пуск а.д. с применением пусковых реостатов. Описание способа, его достоинства и недостатки. С помощью контактных колец к обмотке ротора подключается пусковой реостат. Он создает дополнительное активное сопротивление, что снижает ток в роторе на время пуска. Когда двигатель выходит на номинальный режим, пусковой реостат отключают. Обеспечивается наиболее благоприятное соотношение между пусковым моментом и пусковым током: большой пусковой момент при небольшом пусковом токе (в 2-3 раза больше номинального). Достоинствами является уменьшение пусковых токов до 2-3 раз выше от номинального, увеличение пускового момента. Недостатками пусковых свойств двигателей с фазным ротором являются некоторая сложность, продолжительность и неэкономичность пусковой операции. Последнее вызывается необходимостью применения в схеме двигателя пускового реостата и непроизводительным расходом электроэнергии при его нагреве. (стр. 194) Схема реверсивного пуска асинхронного двигателя. 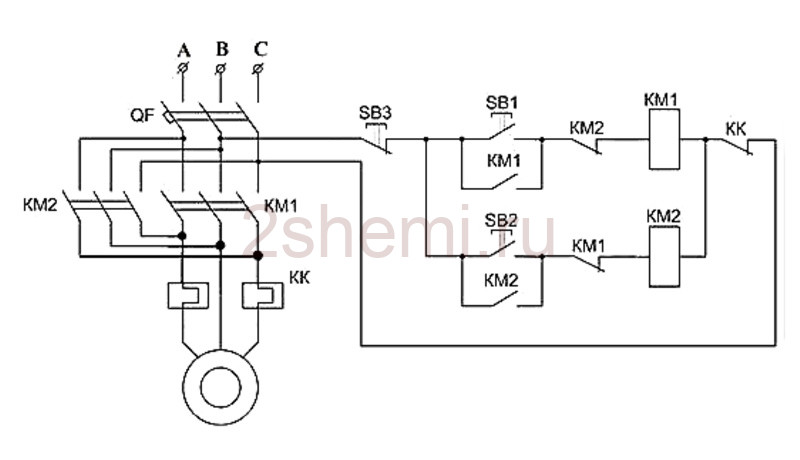 QF – автоматический выключатель, служит для защиты от КЗ и перегруза. КМ – магнитный пускатель, предназначен для пуска и разгона электродвигателя до номинальной скорости, обеспечения его непрерывной работы (силовая часть). SB – кнопки. КМ – самоподхват (параллельно соединенные кнопкам), служит для непрерывной работы двигателя. КМ – защита от «дурака» (между кнопками и катушками), не позволяет включить другое вращения во время работы. КМ – катушка магнитного пускателя, создает магнитный поток и втягивает якорь. КК – тепловая защита от перегруза. Регулирование скорости вращения а.д. с помощью изменения скольжения. Изменение скольжения можно осуществить 3 способами: Изменение скольжения изменением подаваемого напряжения Способ малоприменим, так как имеет малый диапазон регулирования. Понижение напряжения также ухудшает механическую характеристику и перегрузочную способность двигателя Изменение симметрии питающего напряжения Если отключить одну из фаз, магнитное поле статора станет овальным, скорость вращения ротора уменьшится, к.п.д. упадет, диапазон регулирования будет ничтожным, поэтому этот способ не используется. Изменение сопротивления в цепи ротора (для фазных роторов) В цепь фазного ротора включается регулировочный реостат, при этом возрастают электрические потери, двигатель перегревается, диапазон регулирования получается относительно широким, но колебания нагрузки будут сильно влиять на скорость вращения двигателя, что делает этот способ весьма несовершенным. Асинхронный двигатель с фазным ротором к тому же дороже асинхронного двигателя с короткозамкнутым ротором. Этот способ идеально подходит там, где нагрузка на валу стабильна. Регулирование скорости вращения а.д. с помощью частотного преобразователя. Изменение частоты переменного напряжения с помощью частотного преобразователя осуществляется оборудованием, которое расположено в шкафу. Преобразователь частоты включает в себя диодный мост, фильтр, транзистор, фильтр сглаживания и подключается к двигателю. Благодаря преобразователю частоты предоставляется возможность плавно регулировать скорость вращения двигателя, но так как элементы преобразователя чувствительны к питающему напряжению, к их установке и эксплуатации требуется внимательное и аккуратное отношение. 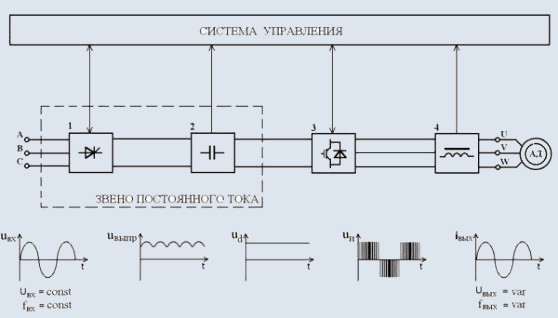 Регулирование скорости вращения а.д. с помощью изменения числа полюсов. Этот способ не сильно ухудшает механическую характеристику, но регулировка получается ступенчатой. Двигатели для применения этого способа должны иметь специальную конструкцию, позволяющую переключать полюса прямо во время работы. Возможны два режима работы асинхронных двигателей с полюсно переключаемыми обмотками: Режим постоянного момента при переключении двигателя с одной частоты вращения на другую вращающий момент на валу двигателя остается неизменным, а мощность изменяется пропорционально частоте вращения ротора. Режим постоянной мощности при переключении двигателя с одной частоты вращения на другую мощность остается примерно одинаковой, а момент на валу изменяется соответственно изменению частоты вращения ротора. Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке статора. В случае же фазного ротора пришлось бы и на роторе применить полюсно переключаемую обмотку, что привело бы к недопустимому усложнению двигателя.
Устройство и виды синхронных машин. Синхронные машины — это бесколлекторные машины переменного тока. По своему устройству они отличаются от асинхронных машин лишь конструкцией ротора, который может быть явнополюсным или неявнополюсным. Что же касается свойств, то синхронные машины отличаются синхронной частотой вращения ротора (n2 = n1) при любой нагрузке, а также возможностью регулирования коэффициента мощности, устанавливая такое его значение, при котором работа синхронной машины становится наиболее экономичной. Синхронные машины обратимы и могут работать как в режиме генератора, так и в режиме двигателя. Синхронные генераторы составляют основу электротехнического оборудования электростанций, т. е. практически вся электроэнергия вырабатывается синхронными генераторами. Синхронные двигатели применяются главным образом для привода устройств большой мощности. Такие двигатели по своим технико-экономическим показателям превосходят двигатели других типов. В крупных электроэнергетических установках синхронные машины иногда используются в качестве компенсаторов - генераторов реактивной мощности, позволяющих повысить коэффициент мощности всей установки. Резюмируя, можно подвести, что синхронные машины подразделяются на синхронные двигатели, синхронные генераторы и синхронные компенсаторы. Синхронные двигатели применяются в 5% случаев. Синхронные генераторы используются для производства 97% всей электроэнергии в мире, а синхронные компенсаторы используются в качестве компенсаторов реактивной энергии. Синхронная машина состоит из неподвижной части – статора (точно такой же, как и у асинхронного двигателя: 3 сдвинутые на 120° обмотки и шихтованный магнитопровод) - и вращающейся части - ротора. Если это синхронный генератор, то с обмоток статора снимается напряжение, если это двигатель, то на обмотки статора оно подается. Роторы синхронных машин могут иметь две принципиально различающиеся конструкции: явнополюсную (демпферная обмотка) и неявнополюсную. На обмотку возбуждения ротора подается постоянный ток с помощью возбудителя для того, чтобы создать там магнитное поле. На гидроэлектростанции имеется гидрогенератор. Гидравлическая турбина обычно развивает небольшую частоту вращения (60-500 об/мин), поэтому для получения переменного тока промышленной частоты (50 Гц) в гидрогенераторе применяют ротор с большим числом полюсов. Роторы гидрогенераторов имеют явнополюсную конструкцию, т. е. с явно выраженными полюсами. На теплоэлектростанции паровая турбина работает при большой частоте вращения, поэтому приводимый ею во вращение генератор, называемый турбогенератором, является быстроходной синхронной машиной. В процессе работы турбогенератора на его ротор действуют значительные центробежные силы. Поэтому по условиям механической прочности в турбогенераторах применяют неявнополюсный ротор, изготавливаемый в виде цельной стальной поклевки. (стр. 237, 242) Синхронный двигатель. Принцип работы. На статор подается 3-х фазное э.д.с., которое создает вращающееся магнитное поле. На роторе возбудителем создается независимое магнитное постоянное поле, оно примагничивается к магнитному полю статора, и двигатель, таким образом, имеет вращение ротора. За счет независимости магнитных полей, механическая характеристика синхронных двигателей является жесткой. Очевидно, что при изменении нагрузки на валу, скорость вращения остается неизменной. Еще одной особенностью синхронного двигателя является его способность работать в разных режимах и потреблять реактивную мощность. Это зависит от величин тока возбуждения: если двигатель работает в режиме недовозбуждения, то его коэффициент мощности меньше 1. Если ток возбуждения номинальный, то коэффициент мощности равен 1, а если двигатель в режиме перевозбуждения, то он выдает реактивную мощность, как конденсатор, что является его достоинством. Синхронный генератор. Виды. Принцип работы. Ротор синхронного генератора раскручивается турбиной электростанцией, вместе с тем на обмотку возбуждения поступает ток от возбудителя. Магнитное поле ротора наводит в обмотке статора 3-х фазную э.д.с., которая поступает в энергосистему. Генератор может работать наоборот (обмотка возбуждения на статоре, а 3-х фазная обмотка на роторе), но при такой системе пришлось бы снимать большие токи с помощью щеток, что неудобно. Напряжение, выдаваемое генератором, зависит от величины тока возбуждения в обмотке ротора. Частота выдаваемого напряжения зависит от скорости вращения ротора синхронного генератора. Синхронные генераторы подразделяются в зависимости от того, на какой электростанции они работают. На гидроэлектростанции присутствует гидрогенератор, на теплоэлектростанции турбогенератор. Отличие данных генераторов кроется в конструкции ротора. Так как у гидрогенераторов небольшая скорость вращения (60-500 об/мин), то у них применяют явнополюсный ротор. На теплоэлектростанции паровая турбина работает при большой частоте вращения, поэтому приводимый ею во вращение генератор, называемый турбогенератором, является быстроходной синхронной машиной. В процессе работы турбогенератора на его ротор действуют значительные центробежные силы. Поэтому по условиям механической прочности в турбогенераторах применяют неявнополюсный ротор, изготавливаемый в виде цельной стальной поклевки. Механическая характеристика синхронного двигателя. Потери синхронного двигателя. 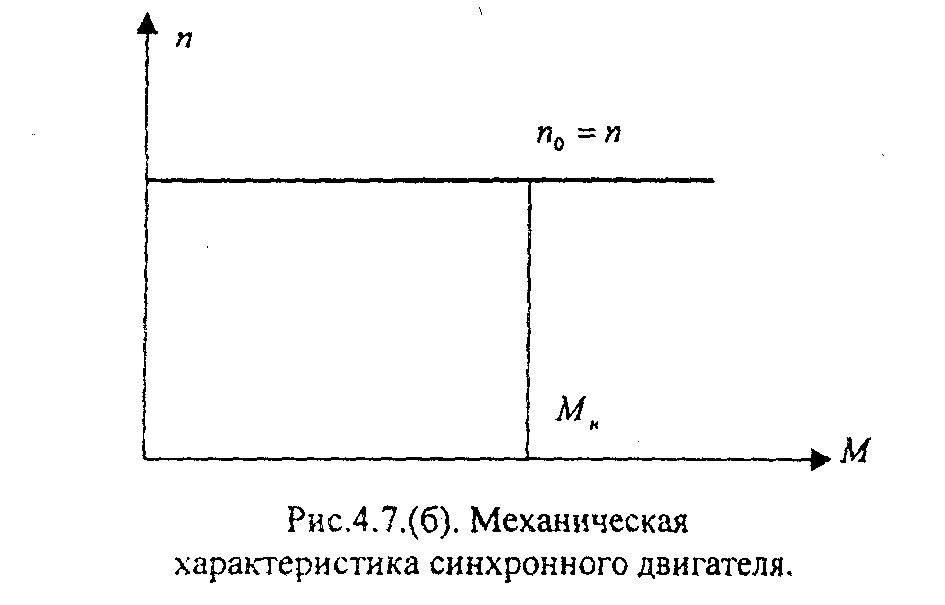 На статор подается 3-х фазное э.д.с., которое создает вращающееся магнитное поле. На роторе возбудителем создается независимое магнитное постоянное поле, оно примагничивается к магнитному полю статора, и двигатель, таким образом, имеет вращение ротора. За счет независимости магнитных полей, механическая характеристика синхронных двигателей является жесткой. Преобразование энергии в синхронной машине связано с потерями энергии. Все виды потерь в синхронной машине разделяются на основные и добавочные. Основные потери в синхронной машине слагаются из электрических потерь в обмотке статора, потерь на возбуждение, магнитных потерь и механических потерь. Магнитные потери синхронной машины происходят в сердечнике статора, который подвержен перемагничиванию вращающимся магнитным полем. Механические потери, равные сумме потерь на трение в подшипниках и потерь на вентиляцию. До6авочные потери в синхронных машинах разделяются на два вида: пульсационные потери в полюсных наконечниках ротора и потери при нагрузке. Добавочные пульсационные потери в полюсных наконечниках ротора обусловлены пульсацией магнитной индукции в зазоре из-за зубчатости внутренней поверхности статора. Добавочные потери при нагрузке в синхронных машинах определяют в процентах от подводимой мощности двигателей или от полезной мощности генераторов. (стр. 267) Возбуждение синхронных двигателей. Синхронные двигатели конструктивно почти не отличаются от синхронных генераторов. Они также состоят из статора с обмоткой и ротора. Поэтому машина независимо от режима работы любая синхронная нуждается в процессе возбуждения - наведения в ней магнитного поля. Генераторы постоянного тока независимого возбуждения Возбудителями В, обмотка возбуждения которого (ОБ) получала питание постоянного тока от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ). Ротор синхронной машины и якоря возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронной машины поступает через контактные кольца и щетки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя (r1) и подвозбудителя (r2). 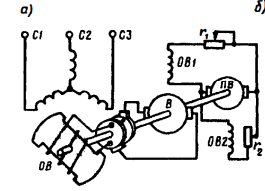 Бесконтактная система электромагнитного возбуждения В качестве возбудителя в этом случае применяют генератор переменного тока, у которого обмотка, в которой наводится ЭДС (обмотка якоря), расположена на роторе, а обмотка возбуждения расположена на статоре. В результате обмотка якоря возбудителя и обмотка возбуждения синхронной машины оказываются вращающимися и их электрическое соединение осуществляется непосредственно, без контактных колец и щеток. Но так как возбудитель является генератором переменного тока, а обмотку возбуждения необходимо питать постоянным током, то на выходе обмотки якоря возбудителя включают полупроводниковый преобразователь, закрепленный на валу синхронной машины и вращающийся вместе с обмоткой возбуждения синхронной машины и обмоткой якоря возбудителя. Питание постоянным током обмотки возбуждения возбудителя осуществляется от подвозбудителя - генератора постоянного тока. Отсутствие скользящих контактов в цепи возбуждения синхронной машины позволяет повысить ее эксплуатационную надежность и увеличить КПД. 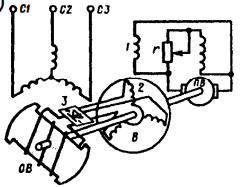 Самовозбуждение синхронного генератора, а В синхронных генераторах, в том числе гидрогенераторах, получил распространение принцип самовозбуждения, когда энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий трансформатор и выпрямительный полупроводниковый преобразователь преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счет остаточного магнетизма магнитопровода машины. Когда генератор отключен, за счет остаточного магнетизма магнитопровода образуется ток, в обмотке возбуждения, благодаря которму в статоре появится э.д.с., которая этот ток будет постоянно подпитывать. Подпитка обмотки возбуждения происходит постоянно через тиристорный преобразователь. В структуре преобразователя имеется понижающий трансформатор, устройство для выпрямления тока, автоматическая регулировка тока возбуждения и так далее. 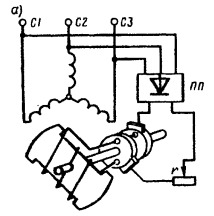 Самовозбуждение синхронного генератора, б Синхронный генератор (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подается в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРБ, на вход которого поступают сигналы напряжения на выходе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты БЗ, обеспечивающий защиту обмотки возбуждения и тиристорного преобразователя m от перенапряжений и токовой перегрузки. 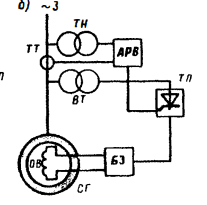 (стр. 239) Пуск синхронного двигателя. Непосредственное включение в сеть синхронного генератора невозможно, так как магнитная связь не успевает установиться ввиду того, что ротор из-за своей инерции не может мгновенно раскрутиться. Есть 2 способа пуска синхронного генератора: с помощью вспомогательного двигателя Ротор раскручивается и затем втягивается в синхронизм. Такой способ нецелесообразен из-за размеров установки и ее цены. асинхронный пуск Этот способ пуска возможен при наличии в полюсных наконечниках ротора пусковой обмотки (клетки). Невозбужденный синхронный двигатель подключается к сети 3-х фазного тока. Магнитное поле статора индуцирует э.д.с. в демпферной обмотке ротора и двигатель запускается как асинхронник. В процессе пуска обмотка возбуждения замыкается на r1, так как в ней наводятся вихревые токи, которые могут сжечь ее. По достижению ротором максимальной скорости вращения, переключатель п переводят в нижнее положение, на обмотку поступает постоянный ток и двигатель втягивается в синхронизм. Реостат нужен для того, чтобы регулировать ток в обмотке возбуждения. Невозбужденный синхронный двигатель включают в сеть. Возникшее при этом вращающееся магнитное поле статора наводит в стержнях пусковой клетки ЭДС, которые создают токи. Взаимодействие этих токов с полем статора вызывает появление на стержнях пусковой клетки электромагнитных сил. Под действием этих сил ротор приводится во вращение. После разгона ротора до частоты вращения, близкой к синхронно, обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент втягивает ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию успокоительной обмотки, ограничивая качания ротора Чем меньше нагрузка на валу двигателя, тем легче его вхождение в синхронизм. Явнополюсные двигатели малой мощности, пускаемые без нагрузки на валу, иногда входят в синхронизм лишь за счет реактивного момента, т. е. даже без включения обмотки возбуждения. При асинхронном пуске синхронного двигателя возникает значительный пусковой ток. Поэтому пуск синхронных двигателей непосредственным включением в сеть на номинальное напряжение применяют при достаточной мощности сети, способной выдерживать без заметного падения напряжения броски пускового тока. Если же мощность сети недостаточна, то можно применить пуск двигателя при пониженном напряжении. 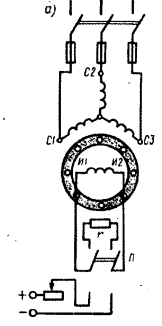 Компенсация реактивной мощности и регулирование напряжения с помощью синхронного двигателя. Синхронный компенсатор. Синхронный компенсатор представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. Система состоит из синхронного генератора (СГ), повышающего и понижающего трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки, то есть в режиме холостого хода, и при этом вырабатывает реактивную мощность, необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минималъного значения. Это способствует повышению технико-экономических показателей всей электрической системы. 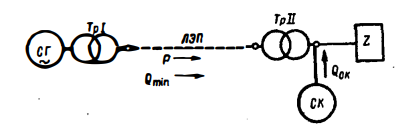 Компенсация реактивной мощности необходима для разгрузки энергосистемы от реактивных токов индуктивного характера. Эти токи можно компенсировать емкостными токами. Для производства емкостных токов применяют конденсаторы или синхронные компенсаторы. Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки в режиме перевозбуждения. В таком режиме синхронный компенсатор является источником чистой реактивной мощности и подключается параллельно нагрузке для того, чтобы разгрузить энергосистему от реактивных токов, которые без него загружали бы генераторы, трансформаторы и ЛЭП. Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным. Обычно коэффициент мощности увеличивают до 0,92-0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Достоинства и недостатки синхронного компенсатора по сравнению с конденсаторами:
Синхронные компенсаторы используются там, где большие мощности. На малых и средних применяют конденсаторы. Синхронный компенсатор не несет активной нагрузки, что обеспечивает СК большую перегрузочную способность. (стр. 298) Сравнение и области применения асинхронных и синхронных двигателей.
Области применения: Д.п.т.: применяют в бытовых приборах, ручном электроинструменте, в электротранспорте и в тех случаях, когда их применять экономически целесообразно. А.д.: ввиду своей простоты широко применяется в промышленности (90% от всех двигателей) С.г.: применяют в высоковольтных установках большой мощности, в нефтяных насосах, гидроэлектростанциях, теплоэлектростанциях. |
