Курсач. 4 Курсовой Проект Жигунов Сергей 4Р-19 МДК 01.03. Проектирование электропривода главного движения токарноревольверного станка модели 1П365
 Скачать 0.96 Mb. Скачать 0.96 Mb.
|

2. РАСЧЕТНАЯ ЧАСТЬЗадание Спроектировать электропривод главного движения токарно-револьверного станка модели 1П365 Режим работы привода – повторно-кратковременный. На токарно-револьверном станке модели 1П365 производится обтачивание в упор шейки вала получистовое Ra = 2,0 диаметром D = 52,5 мм до диаметра d = 50,9 мм. Припуск на обработку (на сторону) h= 2мм. Длина обрабатываемой поверхности l = 550 мм. Длина вала l1 = 740 мм. Материал обрабатываемой заготовки – сталь 45, σв = 680 Мпа. Заготовка – прокат предварительно обработанный. Способ крепления заготовки – в центрах. Обрабатываемая поверхность с коркой. Система станок – приспособление – инструмент – заготовка – нежесткая. Необходимо выбрать режущий инструмент, установить его геометрические параметры, назначить режим резания, определить скорость главного движения резания и мощность затрачиваемую на резание, выбрать электродвигатель. Исходные данные для расчетов
2.1 Расчет и выбор мощности электродвигателяа) Определяется расчетная мощность ЭП и выбирается ЭД: Рдр Pz =1,7*Fz*vz*10-5 (2.2) Pz = 1,7*67,27*151,8*10-4 = 1,74 кВт где: Р др – мощность ЭД расчетная, кВт; nст – КПД станка (главное движение) отн.ед.; F z – усилие резания, Н; v z – скорость резания, м/мин; Силовые и скоростные коэффициенты, показатели степени принимаются по [Табл.1 и 2] по справочнику Алиев “Коммутационные аппараты” при черновой обработке ковкого чугуна, глубине резания t = 5мм, резцом из быстрорежущей стали Р 18 40*40 мм, подаче S = 0,24 мм/об [Табл. 1] по справочнику Алиев “Коммутационные аппараты”. Т – стойкость инструмента, мин. Согласно условия Рном ≥ Р др по [Таблице 1] ,по справочнику Алиев “Коммутационные аппараты”, выбирается АД для токарного станка: АИР 100 S4 3 кВт 1500 об/мин
2.2 Расчет и построение механических характеристик рабочей машины под нагрузкой и на холостом ходу Номинальная угловая скорость Механическая характеристика рабочего органа или машины Мс =f(w) под нагрузкой строится на основании уравнения:  (2.7) (2.7)Мсо – момент сопротивления механизма, не зависящий от скорости, Н*м; Мс – момент сопротивления механизма при скорости ω – текущая (задаваемая) угловая скорость, рад/с; a – показатель степени, характеризующий изменение момента сопротивления от скорости. Для перевода в именованные единицы пользуются формулами Расчет холостого хода: Все графики приведены в приложении Б. 2.3 Расчет и построение нагрузочной диаграммы рабочей машины Построим нагрузочную диаграмму исходя из времени и моментов резания из пункта 2.2. Mс= tраб= 10 минут; tпауза = 4 минуты.  Рисунок 1 - Нагрузочная диаграмма для рабочего токарно-револьверного станка По диаграмме и данным по времени для перерыва работы и самой работы над в будущем подойдет двигатель с режимом работы S5 повторно-кратковременный режим работы электродвигателя с влиянием пусковых процессов и торможением. Этот режим включает в себя достаточно длительное время пуска, которое влияет на его температуру, время работы с постоянной нагрузкой, время торможения и время полной остановки двигателя 2.4 Выбор предполагаемого электродвигателя по роду тока, напряжению, числу фаз, типу, модификации, частоте вращения В токарно-револьверные станки в основном подключены к общей энергосистеме на переменное напряжение трехфазного синусоидального тока; поэтому выбираем двигатель асинхронный с короткозамкнутым ротором с номинальным напряжением 380 В Критерием выбора частоты вращения электродвигателя может быть удобство в эксплуатации. С точки зрения эксплуатации выгодно иметь электродвигатели на синхронную частоту вращения 1500 мин, поскольку из всех марки электродвигателей они составляют наибольшую долю, и в случае выхода из строя не возникает проблемы с заменой. Кроме того, такие электродвигатели имеют хороший коэффициент добротности, поскольку с уменьшением числа пар полюсов добротность увеличивается. Выбор по критериям На основании вышеизложенного предварительно выбираем регулируемый при помощи частотного преобразователя электропривод переменного тока с асинхронным электродвигателем со следующими параметрами: Напряжение питания – 380 В; Схема соединения обмоток – Y; Число фаз – 3; Модификация – обычный коротко-замкнутый ротор; Синхронная частота вращения поля – no = 1500 об/мин; Климатическое исполнение – У; Категория размещения – 1; Степень защиты – IP55; Режим работы подбираем – S5 повторно-кратковременный режим работы электродвигателя с влиянием пусковых процессов и торможением 2.5 Выбор электрической принципиальной схемы электропривода и её описание Под двигатель АИР100S4 с мощностью 3 кВт. Вычисляем общие передаточные отношения: nдв – частота оборотов двигателя; nст – частота оборотов шпинделя станка. Количество ступеней по типу редуктора определяется по таблице, исходя из рассчитанного передаточного числа.
Под передаточное число фактическое 12,8 подойдет цилиндрический двухступенчатый редуктор, для примера: 1ЦУ-160-4,5. Р - мощность электродвигателя, кВт U - передаточное число редуктора N - КПД редуктора ( для цилиндрического редуктора принимается 0,97-0,98 для червячного - свое для каждого передаточного числа (см. паспортные данные)) nвх - количество оборотов входного вала редуктора или электродвигателя, об/мин К - коэффициент эксплуатации выбирается по таблице. tв = время цикла Для двигателей повторно - кратковременного режима допустимое время цикла установлено равным 10 мин. Если tц 10 мин, то режим работы двигателя считается продолжительным ПВ=100%.
Вычисляем номинальную мощность частотного преобразователя напряжения Sн, кВА: Где Определяем максимальный ток Imax по формуле: U – номинальное напряжение двигателя, В Производим выбор частотного преобразователя по справочнику по условиям: ̶ Номинальный ток электродвигателя не должен превышать номинальный ток частотного преобразователя. ̶ Полная мощность электродвигателя не должна превышать полную мощность частотного преобразователя. Тип: M372T4B Полная мощность = 5,5 кВА Номинальный ток = 9,4 А Мощность в номинальном режиме =3,7 кВт 2.6 Приведение мощности, момента и скорости рабочей машины к валу электродвигателя и обоснование режима его работы Ориентировочная мощность электродвигателя P’нд и приведенная к валу электродвигателя мощность P’сн определяются по формуле: Где Pсн – мощность на валу рабочей машины при номинальной нагрузке, кВт; P’сн – приведенная к валу электродвигателя мощность рабочей машины, кВт; общ.пер – общий КДП передач, самого редуктора который мы выбрали, о.е. Рассчитываем приведенную мощность рабочей машины и приведенную мощность потенциального двигателя: Далее рассчитывается приведенный момент к валу электродвигателя: Рассчитываем приведение угловой скорости ωсн рабочей машины к валу электродвигателя: ωсн= iобщ= 12,8 о.е. Вычисляем приведенное рабочее время для привода и электрического аппарата: Принимаем общее номинальные данные для режимов работы и подбираем для S5 повторно-кратковременный данные: Tн=60,1 мин; tраб.общ.= 9 мин. 2.7 Окончательный выбор электродвигателя по мощности с учетом режима работы При режиме работы S5 проверяем электродвигатель повторно-кратковременного режима работы по условию: где Определяем потери в номинальном режиме где Потери мощности на валу ΔPx определяются по формуле где Рдр –мощность нагрузки на валу электродвигателя, Вт; ηэ ˗ КПД на валу электродвигателя Условие: Исходя из полученных расчетов для привода рабочей машины выбираем асинхронный электродвигатель АИР100S4 номинальной мощностью 3 кВт. Таблица 5 - Классы изоляции обмоток электродвигателей АИР и допустимое превышение температуры обмотки
2.8 Проверка выбранного электродвигателя по условиям пуска, перегрузочной способности и на допустимое число включений в час Выбранный по мощности электродвигатель при любых режимах работы проверяется по условиям пуска и на преодоление максимальной нагрузки, а в режимах работы S3…S5 – дополнительно на допустимую частоту включения в час. Проверка по условиям пуска: где Mn, Mмин – пусковой и минимальный при пуске момент электродвигателя, Нм; M'со,M'сн – приведенный момент, требуемый для вращения рабочей машины, при скорости ω=0 и ω=ωмин, соответствующий минимальному моменту электродвигателя. Обычно принимают ωмин=0,15* ω0, где ω0 – синхронная скорость вращающегося магнитного поля, рад/сек. ЗначениеM'со,M'сн находят по приведенной механической характеристике рабочей машины; tп.нагр и tп.доп – время пуска электродвигателя под нагрузкой и допустимое время пуска, сек. Нужные данные из таблиц допустимых значений исходя из выбора двигателя и его степени защиты и времени работы а также режима работы: IP=54: Класс изоляции F до 170°С данные из таблицы 4 (прил. А): τдоп=115; τраб=103; А также общие данные: u=0,8 – относительное снижение напряжения в сети в период пуска, о.е.; Скорость роста температуры, плотность тока, момент инерции на валу электродвигателя V, j, J, находятся в приложении А. Нужный момент инерции электропривода к валу электродвигателя для формулы: Jпр = 2Jрот.дв (2.32) Jп= 2*0,028 = 0,056; Кратности для моментов в электродвигателе (см. приложение А) Расчет минимальной скорости оборотов в цикле: Вычисляем допустимое время пуска: Пусковой момент и Минимальный момент электродвигателя высчитываются следующим образом: Выясняем пусковые и минимальные моменты для условия: Рассчитываем приведенные моменты, требуемые для вращения рабочей машины:  (2.35) (2.35) (2.36) (2.36)Критический момент электродвигателя определяется по формуле: Время пуска вхолостую приблизительно, определяем выражением: Вхолостую нам понадобиться дальше, теперь делаем расчет времени пуска двигателя под нагрузкой приблизительно оцениваем по выражению: M'с.ср – средний (за время пуска) момент сопротивления рабочей машины по ее механической характеристике. Рассчитываем это по формуле: Сверимся с условиями Для повторно-кратковременных режимов работы S3…S5 дополнительно проверяют, чтобы фактическое число включений в час не превышало допустимого для данного электродвигателя числа включений в час tраб и tо – время работы и перерыва брать в минутах.  (2.42) (2.42)Высчитываем коэффициент нагрузки: Потери при пуске рассчитываются по формуле:  (2.43) (2.43)Выясняем потери при пуске электродвигателя: Потери при торможении рассчитываем по формуле:  (2.45) (2.45)  (2.46) (2.46) (2.47) (2.47)Проверяем условие 2.9 Проверка выбранного электродвигателя на нагревание за цикл нагрузочной диаграммы В этом пункте надо определить температуру превышения обмотки в конце цикла нагрузочной диаграммы и построить кривую нагрева и охлаждения электродвигателя за цикл нагрузочной диаграммы. Расчет кривой нагрева и охлаждения проводят по формуле: Где τуст – установившаяся температура (для каждой ступени нагрузки определяется отдельно), °С; t – время (от начала действия данной ступени нагрузки), мин; Tн – постоянная времени нагрева (одно значение для всех ступеней нагрузки), мин; τнач – начальная температура превышения (для каждой ступени нагрузки разная величина °С. Установившаяся температура превышения τуст определяется по уравнению: Где ∆Px – потери мощности в электродвигателе при нагрузке на валу Aн – номинальная теплоотдача электродвигателя, Вт/°С, определяется по формуле: Установившаяся температура превышения определяется по уравнению: Постоянная времени охлаждения вычисляется по формуле: τнач= τуст= τраб на первой ступени графика из этого следует следующая формула с условными значениями: t – берется за время работы на графике, для примера кривой с t = 5 мин. При отключении электродвигателя его остывание происходит по уравнению: Сам расчет кривой начнется с примера в 5 минут на t Все графики приведены в приложении Б 2.10 Построение механической и электромеханической характеристик электродвигателя Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора. Для построения нам необходимо знать номинальный момент и скольжение: Mн = 49,3 Нм; Sн = 4% Кратность для максимального момента равна 2,3 Вычисляем критическое скольжение и момент: Рассчитываем критический момент: Вычисляем критический момент: С помощью упрощенной формулы Клосса, рассчитаем моменты для других значений скольжений:  (2.58) (2.58)Механическая характеристика высчитывается по этой формуле:  = 74,2 Нм; = 74,2 Нм;Частоту вращения выразим из формулы для определения скольжения: Частота вращения рассчитывается так: Таблица 7 – Значения расчетных единиц механической характеристики
Графики с механической характеристикой отношения момента от скольжения и отношения частоты оборотов от момента приведены в приложение Б 3. РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА 3.1 Описание разработанной схемы управления электрического привода На принципиальных схемах показываются силовые цепи и цепи управления. Элементы на схеме изображаются в виде условных графических обозначений, установленных в действующих стандартах ЕСКД ГОСТ 2.721 - 74, 2.722 - 68, 2.723 - 68, 2.725-68…2.756-68 и т.д. 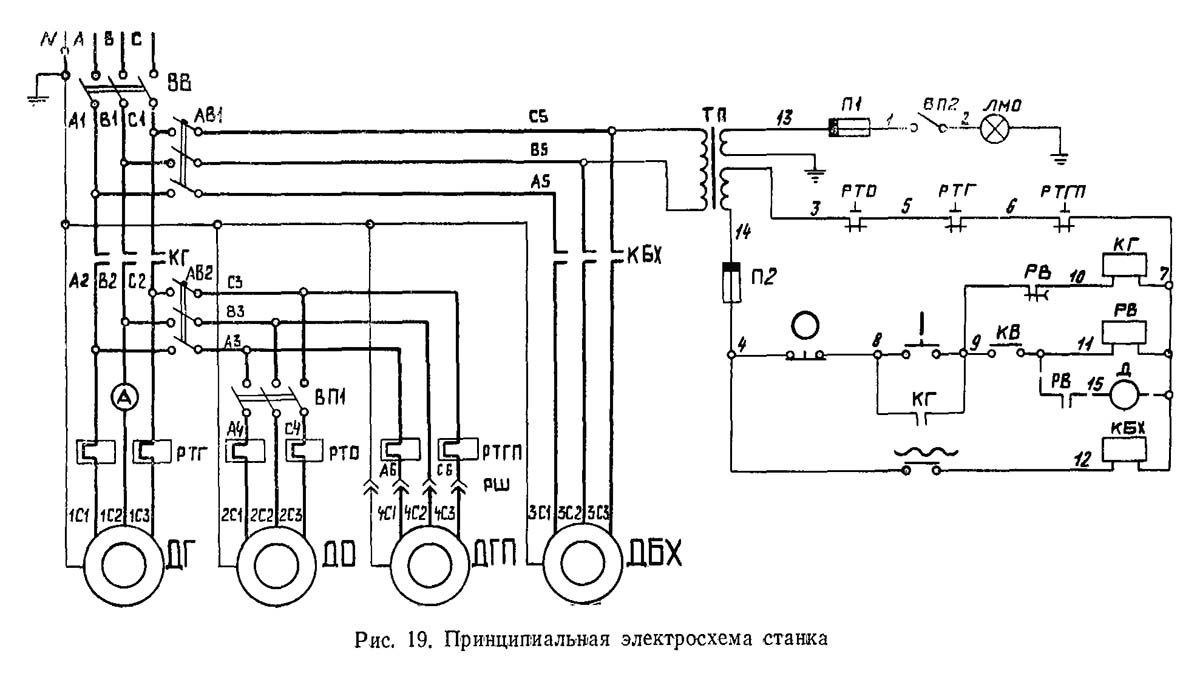  Описание электросхемы Перед началом работы станка необходимо электрическую его часть подключить к цеховой сети посредством вводного выключателя ВВ (см. рис. 19). Пуск главного электродвигателя осуществляется нажатием кнопки «Пуск» 1 (8—9), которая замыкает цепь катушки контактора КГ (7—10). Катушка под влиянием проходящего по ней тока притягивает сердечник якоря КГ и замыкает механически связанные с ним главные контакты и блок-контакты. При этом силовые контакты контактора подключают двигатель ДГ к сети, а питание катушки контактора осуществляется через замкнувшийся блок-контакт КГ (8- 9). Последнее исключает дальнейшее нажатие кнопки «Пуск» 1. Для ограничения холостого хода главного двигателя в схеме имеется реле времени РВ. При среднем положении рукоятки фрикциона (шпиндель не вращается) замыкается нормально открытый контакт конечного выключателя KB (9—11) и включается реле времени РВ, которое через установленную выдержку времени отключит своим контактом (9—10) главный электродвигатель. В станках тропического исполнения ставится моторное реле времени*. В среднем положении рукоятки фрикциона нормально открытым контактом конечного выключателя KB (9—11) включается электромагнит реле времени РВ (7—11), якорь которого через систему рычагов замыкает НО контакт РВ (12—15). При этом включается синхронный микродвигатель реле времени Д (7—15), который через редуктор и систему валика с кулачком размыкает НЗ контакт РВ (9—10) с установленной выдержкой времени и отключает главный электродвигатель. |