МОДЕЛИРОВАНИЕ РАБОТЫ КАРЬЕРНОГО ЭКСКАВАТОРА. Программа Факультет Кафедра к защите допустить Зав кафедрой
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

J Properties | Events |
Bind Visually... Name Рисунок 3.3 - Инспектор объектов (Object Inspector) В верхней части инспектора объектов (Object Inspector) находится выпадающий список, который позволяет выбрать нужный объект из имеющихся на форме, показано на рисунке 3.1.4. CameraZ TCamera Conel TCone Cubel TCube CubelO TCube Cubell TCube Cube2 TCube Cube3 TCube Cube4 TCube CubeS TCube CubeS TCube Cube7 TCube CubeS TCube Cube9 TCube Cyl Cyl Cyl Cyl Cyl Cyl I nderl TCylinder ndeMO TCylinder nder11 TCylinder nder12 TCylinder nder13 TCylinder nder14 TCylinder nder!5 TCylinder Cubel TCube Рисунок 3.4 - Выпадающий список Свойства компонента позволяют определить его внешний вид и поведение. Многие свойства имеют значение в колонке свойств, которые устанавли ваются по умолчанию. Эти свойства можно наблюдать в окне свойств (Properties) и также редактировать их во время проектирования или написать код для изменения свойств компонента во время работы, показано на рисунке 3.5. |
| | Cursor | crDefault Л |
| | Depth | H 0,7 |
| | DragMode | dmManual |
| | Height | H0,2 |
| | HitTest | 0 True |
| 0 | LiveBindings De; | LiveBindings Designer |
| | 1 nrkpd | П Falsp v |
J Properties | Events
Рисунок 3.5 - Свойства компонента
OnDragDrop OnDragEnd OnDragEnter OnDranl pavp
Рисунок 3.6 - Окно событий
Окно событий (Events), показано на рисунке 3.6, в инспекторе объектов (Object Inspector) показывает список событий, которые могут быть использованы для выбранного объекта. Оно содержит список обработчиков событий, которые могут быть различными по отношению к компоненту. Это зависит от выбранного разработчиком компонента. Создавая обработчик событий, идёт присвоение программе выполнения написанной функции, если это событие произойдёт.
Метод - это функция, которая связана с компонентом и которая объявляется, как часть объекта. При создании обработчика событий, можно вызывать методы (например, при использовании TrackBar, можно прописать изменение расположения TCube в форме), показано на рисунке 3.7 [15].
void fastcall TForniArrows3d: :TrackBarlChange (TObject ^Sender}
{
Cubel->RotationAngle->Y = TrackBarl->Yalue;
}
Рисунок 3.7 - Функция, связанная с компонентом
Менеджер проекта (Project Manager) показывает списки файлов и приложений, а также позволяет осуществить навигацию между ними, показано на рисунке 3.8.
FMArrows3dCPP.cbproj - Project.
qI "■ В? I П В
: т | [5? т
File
^ ProjectGroupl Fi-qI FMArrows3dCPP.exe
Build Configurations [Debug] ф& Target Platforms [Win64] i'i C:\Users h® FMArrowsBdCPP.cpp Й-! Fo rm Arrows. ep p |
Рисунок 3.8 - Менеджер проекта (Project Manager)
Использовании менеджера проекта при создании 3D модели позволяет значительно облегчить и ускорить её построение.
Анализ алгоритмов моделирования
При создании 3D модели работы экскаватора ЭКГ-8И в среде программирования и моделирования C++ Builder XE8 использовались компоненты из палитры компонентов (Tool Palette), показано на рисунке 3.9:
LightMaterialSource;
Dummy;
Cube;
Cylinder;
Plane;
Camera;
TrackBar.
to | to to
ЭП FormArrows3d
LightMaterialSourcel LightMaterialSource2 LightMaterialSource3 LightMaterialSource4 LightMaterialSourceo ■■LightMaterialSourceX LightMaterialSourceY LightMaterialSourceZ S-O Viewport3Dl Dummyl Cube3
-a -a ■a -a
-a
. -Q
Ш-а Cube4 ®a Ground DummyXY CameraZ
a Lightl
a TrackBarl
Cubel
Cube2
Cylinderl
Cylinder2
Cylinder3
Cylinder4
Рисунок 3.9 - Используемые компоненты
Принцип построения 3D модели в программе C++ Builder XE8 заключается в использовании пространственных координат осей X, Y, Z.
При построении необходимого компонента, нужно указать координаты точки, от которой будет производиться построение, показано на рисунке 3.10.
н|рс
Exposition X Y
□"Position 3D)
0.35
0,15
Z О
Рисунок 3.10 - Координаты точки начала построения
Затем, производится указание геометрических размеров объекта построения (ширина, длина, высота), показано на рисунке 3.11.
Depth
Width
Height
H 0,7
H 0.2 H 0.2
Рисунок 3.11 - Г еометрические размеры объекта
Положение предмета в пространстве и его геометрические размеры обозначаются в условных единицах.
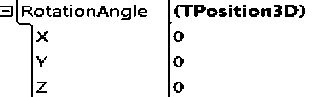
Рисунок 3.12 - Задание угла поворота
Помимо этих функций, в каждом из использованных компонентов есть функция вращения на заданный разработчиком угол, показано на рисунке 3.12.
Значение угла задаётся в градусах.
Данный тип построения фигур распространяется на все компоненты, используемые при создании проекта.
Также у каждого из используемых компонентов в проекте есть свои уникальные свойства.
LightMaterialSource - компонент, который используется для имитации падающего света и тени на объекте. По умолчанию, у построенной фигуры нет явно видимых освещённых сторон и теней. Для этого нужно задать цветовые свойства (ambient, diffuse, emissive, specular), т.е. выбрать из палитры цветов нужный цвет, показано на рисунке 3.13 [16].
Ambient
Diffuse
Emissive
Specular
|=§ Ц Darkslategray |=| □ Gray Null
1 s ■ FF606O60
Рисунок 3.13 - Цветовые свойства
Dummy - компонент выполняет функцию «контейнера», т.е. объединяет нужные фигуры в группы и присваивает им общие свойства.
Cube, Cylinder, Plane - компоненты, которые являются геометрическими фигурами с индивидуальными свойствами. С помощью их можно строить различные объекты (в нашем случае экскаватор ЭКГ-8И).
Camera - компонент, который устанавливает первоначальный вид при компилировании проекта.
TrackBar - компонент, позволяющий прокручивать страницу с помощью бегунка. Затем, каждый бегунок можно привязать к конкретной фигуре для выполнения заданных действий (например, поворот на 900) [16].
В конце построения 3D модели экскаватора ЭКГ-8И для более реалистичной картинки используется компонент LightMaterialSource. С помощью данного компонента осуществляется наложение на построенные объекты, заранее подготовленные картинки. Для этого используется такое свойство, как Texture, покащанная на рисунке 3.14.
Object Inspector f X
L i g htMateria I So u rce4 TLi g htM ate ri a IS о ijV
Events
J Properties
Shininess
Specular
StyleName
Tag
Texture
30 л
НИ #FF&0&0&0
(Bitmap 590 я 127]
Рисунок 3.14 - Свойство Texture
При совместном использовании всех выше перечисленных компонентов, можно создавать различные проекты, которые будут выполнять необходимые функции, задуманные разработчиком [17].
Реализация движений изучаемого объекта (в нашем случае - экскаватор ЭКГ-8И) осуществляется путём написания программного кода на языке программирования С++ [18].
При построении объёмной модели, используются пространственные координаты Х, Y, Z. Исходя из того, в какой плоскости будет происходить движение модели, указывается в коде соответствующая ось пространственных координат. Используемый код представлен ниже [19]:
Представленный программный код в приложении А применяется для управления трёхмерной моделью с помощью бегунков (т.е. вручную) [20].
Данный способ управления хорош тем, что пользователь может в ручную задавать необходимые движения, осуществлять и наблюдать полную амплитуду движений, а также задавать различную их последовательность.
Также, пользователю предоставляется возможность выбора способа управления трёхмерной моделью: ручной или автоматический [21].
Представленный программный код в приложении Б автоматического способа управления трёхмерной моделью осуществляется с помощи нажатия кнопки «Moving». После чего запускается полный рабочий цикл экскаватора ЭКГ- 8И. Используемый код представлен ниже [22].
Данный способ управления хорош тем, что пользователь может сразу наблюдать целостность происходящей картинки, параллельно анализирую движения, выполняемые объектом [23].
Благодаря программному коду, появилась возможность осуществить наглядную работу 3D модели экскаватора ЭКГ-8И, т.к. при работе его примерно 60% времени цикла тратится на поворот платформы с одновременным подъёмом ковша, разгрузку ковша и его возврат в исходное положение. Для сокращения этого времени необходимо увеличить мощность привода. Однако с увеличением мощности возрастают скорости рабочих операций и силы инерции, которые способствуют опрокидыванию экскаватора. Поэтому эффективность и
безопасность работы экскаватора ЭКГ-8И зависит от способности противодействовать опрокидыванию.
3.4 Результаты моделирования движения
Результатом моделирования можно считать готовую 3D модель работы экскаватора ЭКГ-8И в среде программирования и моделирования C++ Builder XE8 показано на рисунке 3.15.
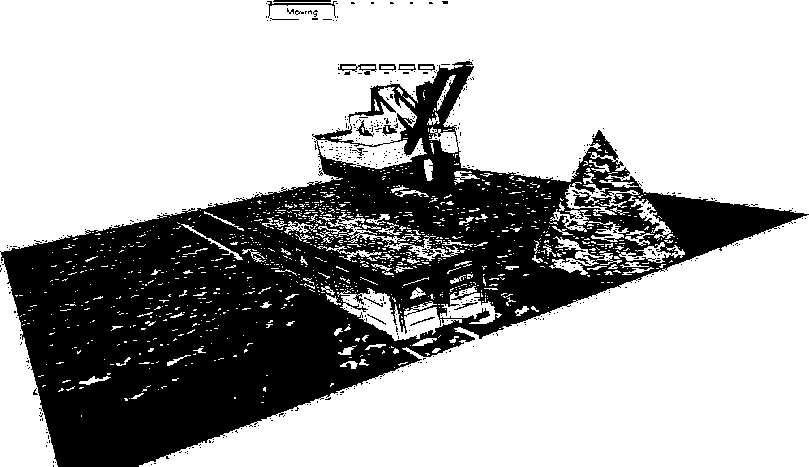
Рисунок 3.15 - Г отовая модель
Модель позволят воспроизвести полный рабочий цикл экскаватора ЭКГ - 8И. Также она позволяет изменять последовательность работы механизмов, используя бегунки вверху экрана.
Подводя итог, можно сделать вывод, что произведённые ранее вычисления поспособствовали правильному построению 3D модели и корректной её работы. В дальнейшем, 3D модель может помочь инженерам-проектировщикам грамотно модернизировать экскаватор с любыми исходными характеристиками, при этом снизить уровень технических ошибок.
Механизм поворота
Особенностью работы поворотного механизма экскаватора типа ЭКГ-8И заключается в том, что может осуществляться с полным отсутствием периода равномерного движения (после разгона сразу начинается торможение). Такое возможно при перемещении поворотной башни на маленький угол (до 10-20°).
Схема роликового круга представлена на рисунке 4.1.
Рисунок 4.1 - Роликовый круг
На рисунке 4.1 представлены следующие обозначения: 1 - ролик; 2 - втулка; 3 - шайба; 4 - ось; 5 - сепаратор; 6 - труба; 7 - наружное кольцо; 8 - внутре- нее кольцо; 9 - втулка; 10 - масленка
В таком режиме работы основной нагрузкой двигателя ДЭВ-812 поворотного механизма является сила инерции перемещаемых и вращаемых масс.
Также к недостаткам поворотного механизма, а именно роликового круга можно отнести быстрый износ рабочих деталей, неудобство смазки, количество смазки и сложность монтажа, что влечет за собой значительные материальные и физические затраты. А именно, приходиться смазывать втулки роликов роликового круга каждые 24 часа по 4 грамма смазочного материала, это влечет за собой временные и физические дополнительные затраты.
Усовершенствование конструкции механизма поворота
Поворотное устройство состоит из центральной цапфы 1, нижнего 2 и верхнего 3 двухрельсовых кругов катания, опорных катков 4, заключенных в обойму 5 и посаженных на ось 6 через пространство, заполненное слоем ферромагнитных частиц 7. На каждую ось 6 и в отверстие катка 4 напрессованны соответственно втулки 8 и 9, выполненные из материала со свойствами постоянного магнита, одноименные полюсы которых контактируют с феррочастицами 7.
Для изоляции магнитного поля, создаваемого втулками 8 и 9, от ферромагнитных материалов оси 6 и катка 4 предусмотрены две втулки, выполненные из антиферромагнитного материала, например хрома, одна из которых, втулка 10, запрессована между осью 6 и магнитной втулкой 8, другая втулка 11 - между катком 4 и магнитной втулкой 9.
Схема поворотного устройства представлена на рисунке 4.2.
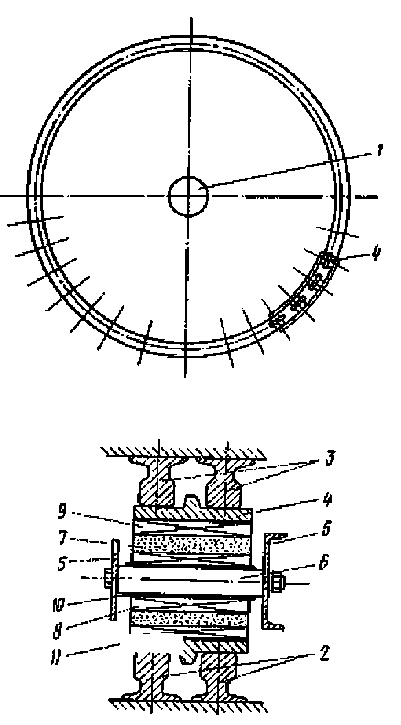
Рисунок 4.2 - Поворотное устройство
-EES
Опорно-поворотное устройство работает следующим образом.
При перемещении верхней поворотной части машины относительно нижней поворотной через катки 4 осуществляется перекатывание последниз по верхним 3 и нижним 2 двухрельсовым кругам. Внутри катка 4 происходит скольжение его внутренней поверхности относительно неподвижной оси 6. Благодаря заполненному пространству между катком 4 и осью 6 ферромагнитными частицами 7 не происходит непосредственного контактирования катка 4 об ось 6, в то время как взаимодействуют между собой только феррочастицы 7, одни из которых притягиваются к магнитной втулке 8 оси 6, а другие - к магнитной втулке 9 катка 4. Так как эти втулки обращены к ферромагнитным частицам 7 одноименными полюсами, то «скольжение» частиц катка относительно частиц оси происходит в некоторой зоне с минимальной силой трения вследствие их взаимного отталкивания [24].
Выбор главных механизмов
В исследовании оптимизации рабочего процесса будут сравниваться двигатели постоянного тока (ДПТ) с асинхронными двигателями (АД) главных приводов.
Характеристики ДПТ главных рабочих приводов приведены в таблице 4.1.
Таблица 4.1 - Характеристики ДПТ главных рабочих приводов
| Наглядный вид | | V И j | Гг ■“Г п |
| Тип двигателя | ДПВ-200 | ДПЭ-200 | ДПЭ-300 |
| Назначение | Поворот башни | Напор стрелы | Подъем/ опускание ковша |
| Мощность, кВт | 200 | 200 | 300 |
| Напряжение, В | 370 | 395 | 440 |
| Ток, А | 585 | 585 | 850 |
| Частота вращения номинальная, об/мин | 750 | 750 | 900 |
| Номинальный момент на валу, кНм | 2,55 | 2,55 | 3,2 |
| Масса, кг | 2740 | 2960 | 3560 |
| Г абариты (Д/Ш/В), мм | 1613/1033/1420 | 1733/980/1410 | 1895/1180/1620 |
Сравнивая рабочие диаграммы синхронного двигателя с асинхронным двигателем, представленные на рисунке 4.3 и 4.4, можно сделать вывод о том, что для правильной и успешной работы механизмов экскаватора ЭКГ-8И подойдут оба типа электрических двигателей.
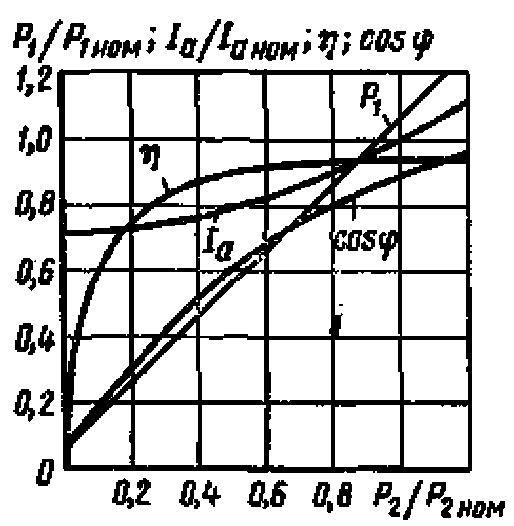
Рисунок 4.3 - Рабочая диаграмма синхронного двигателя
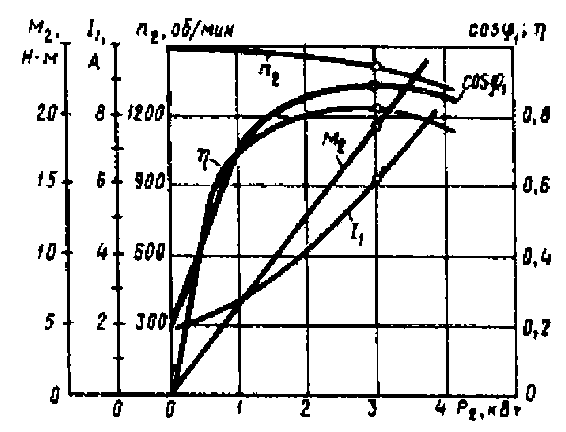
Рисунок 4.4 - Рабочая диаграмма асинхронного двигателя
Исходя из того, что оба ЭД могут быть использованы в работе механизмов экскаватора, делается выбор в сторону асинхронного двигателя, т.к. в синхронном двигателе существуют некоторые недостатки:
Сложность конструкции;
Сравнительная сложность пуска;
Трудность регулирования частоты вращения;
Регулярное техническое обслуживание.
Для замены двигателей постоянного тока на асинхронные двигатели в главных рабочих механизмах, необходимо определить требуемую мощность каждого электродвигателя для каждого типа механизма (подъём/опускание ковша, поворот башни, напор стрелы).
По формуле (4.1) определим мощность двигателя для каждого механизма
Ри
m
h
(4.1)
[25]:
где mp - масса руды в ковше (т), g - ускорение свободного падения, равное 9,8 м/с2, v - скорости движения механизма (м/с), п - КПД (%).
НОМ
15,87 • 9,8 • 0,4
0,87
71,5 кВт.
Мощность асинхронного двигателя для механизма поворота башни:
Р
НОМ
15,87 • 9,8 • 0,61
0,85
73,3 кВт.
Мощность асинхронного двигателя для механизма напора стрелы:
Р
НОМ
15,87 • 9,8 • 0,94
0,93
178,3 кВт.
Мощность асинхронного двигателя для механизма подъёма/опускания ковша:
Осуществив расчёты, подберём асинхронные двигателя для главных рабочих механизмов. Т.к. для механизма поворота башни и напора стрелы расчётная мощность оказалась приблизительно равной, выберем одинаковый
асинхронный двигатель типа 4АК250М4УЗ. Для механизма подъёма/опускания ковша выберем асинхронный двигатель типа 4МТНФ-400Ь8У1.
Характеристики АД главных рабочих приводов приведены в таблице 4.2.
Таблица 4.2 - Характеристики АД главных рабочих приводов
| Наглядный вид | | |
| Тип двигателя | 4МТНФ-400Ь8У1 | 4АК250М4УЗ |
| Назначение | Подъем/опускание ковша | Поворот башни/ Напор стрелы |
| Мощность, кВт | 200 | 71 |
| Напряжение, В | 380 | 380 |
| Ток, А | 407 | 137 |
| Частота вращения номинальная, об/мин | 750 | 1500 |
| Номинальный момент на валу, кНм | 2,55 | 0,45 |
| Масса, кг | 2650 | 2550 |
| Г абариты (Д/Ш/В), мм | 1541/1158/1364 | 1280/1450/1100 |
Для управления асинхронным двигателем необходим преобразователь частоты. По расчётной номинальной мощности и по расчётному номинальному
току выберем ПЧ. Расчёт номинальной мощности ПЧ осуществляется по формуле (4.2) [25]:
Рпч =
h ДВ
где Рном - мощность асинхронного двигателя (кВт), цдв - КПД асинхронного двигателя (%).
Р
ПЧ
71,5-100
0,93
76,8 кВт.
Номинальная мощность ПЧ асинхронного двигателя для механизма поворота башни:
Р
ПЧ
73,3-100
0,93
78,8 кВт.
Номинальная мощность ПЧ асинхронного двигателя для механизма напора стрелы:
Р
ПЧ
178,3-100
0,93
191,7 кВт.
Номинальная мощность ПЧ асинхронного двигателя для механизма подъ- ёма/опускания ковша:
I
ПЧ
P -100
P НОМ
Л' U НОМ -Пдв ■ cosj’
(4.3)
Расчёт номинального тока ПЧ осуществляется по формуле (4.3) [25]:
где Рном - мощность асинхронного двигателя (кВт), Пом - номинальное напряжение асинхронного двигателя (В), цдв - КПД асинхронного двигателя (%), cosy - коэффициент мощности асинхронного двигателя.
I
ПЧ
71,5- 100
л/3 - 380-0,93- 0,8
1,4 А.
Номинальный ток ПЧ асинхронного двигателя для механизма поворота башни:
Номинальный ток ПЧ асинхронного двигателя для механизма поворота башни:
j _ 73,3-100
ПЧ _^ -380-0,93-0,8
1,5 А.
Номинальный ток ПЧ асинхронного двигателя для механизма поворота башни:
178,3-100
/
ПЧ
3,6 А.
л/3 - 380 - 0,93-0,8
Произведя расчёты ПЧ асинхронного двигателя для всех механизмов, выбираем ПЧ «Эратон-М5», представленный на рисунке 4.5.
Рисунок 4.5 - Преобразователь частоты «Эратон-М5»
Данный тип преобразователя прост в эксплуатации, надёжен и неприхотлив. Может использоваться в условиях промышленного предприятия.
Система управления
Для повышения производительности экскаватора ЭКГ-8И, увеличения ресурса основных узлов и агрегатов, а также снижения эксплуатационных расходов на проведения технического обслуживания, предлагается заменить действующую систему управления генератор-двигатель с силовым магнитным усилителем на рекуперативный транзисторный бездатчиковый частотнорегулируемый электропривод на основе асинхронных двигателей с короткозамкнутым ротором.
Благодаря внедрению новой системы управления экскаватором ЭКГ-8И получится, что снизятся расходы на проведение планового ТО. Под ТО подразумевается плановая замена щеточно-коллекторных узлов в двигателях постоянного тока.
Также, новая система управления поспособствует эффективному потреблению электрической энергии за счёт рекуперации энергии торможения электрических приводов. Это поможет добиться следующих показателей:
Снижение потребления электроэнергии на 20%;
Повышение КПД системы управления до 85-92%;
Увеличения коэффициента мощности до 0,93-0,95.
Предлагается заменить действующие двигатели постоянного тока, отвечающие за поворот башни (ДПВ-200), напор стрелы (ДПЭ-200) и подъ- ём/опускание ковша (ДПЭ-300), на асинхронные двигатели с короткозамкнутым ротором (4МТНФ-400Ь8У1 и 4АК250М4УЗ), отвечающие за те же функции. Данные двигатели имеют аналогичные технические характеристики и примерные массовые и геометрические показатели. Эти характеристики приведены в таблицах 1 и 2. Внедрение их в работу экскаватора ЭКГ-8И не повлечёт за собой затрат на установку двигателей, т.к. система крепежей аналогичная [26].
Следующий этап модернизации экскаватора является замена командного контролера и силового магнитного усилителя на преобразователь частоты - рекуперативный транзисторный бездатчиковый частотно-регулируемый электропривод (РБЧРЭП). Его структурная схема показана на рисунке 4.6.
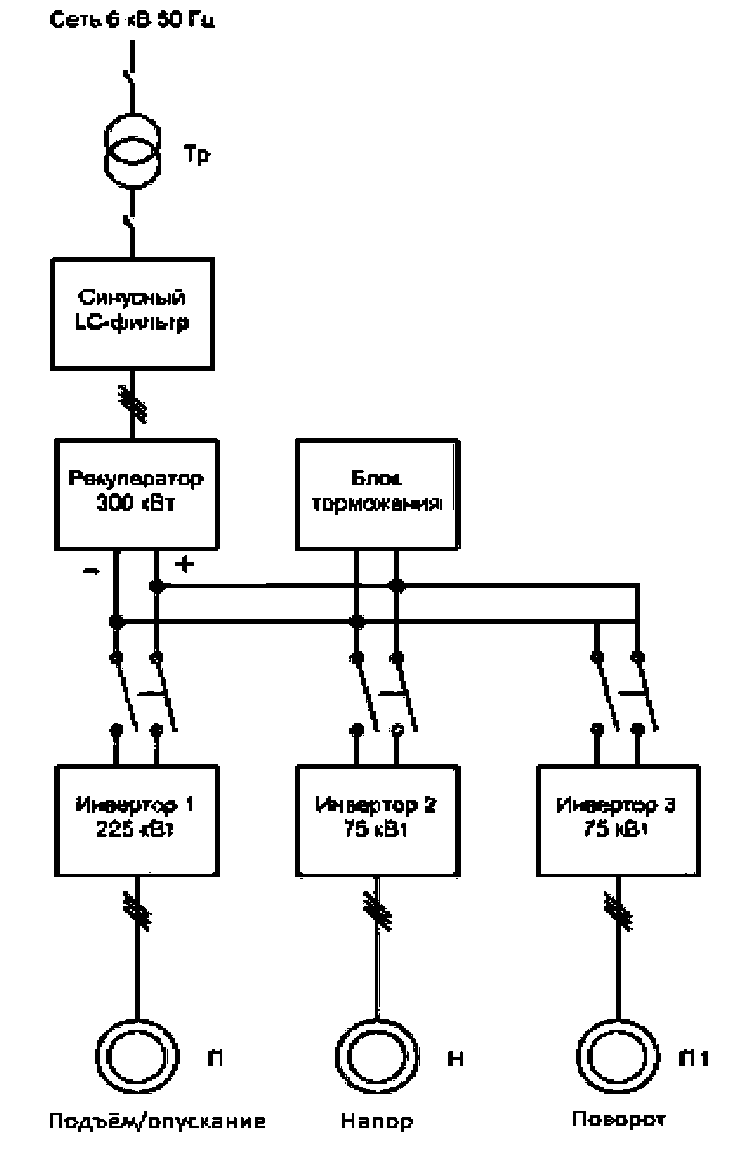
Рисунок 4.6 - Структурная схема РБЧРЭП экскаватора ЭКГ-8И
От сети 6кВ и 50 Гц питается силовой масляный трансформатор типа ТМЭ-400. Далее, через автомат подключен силовой синусный LC-фильтр, который в свою очередь подключен к рекуператору.
В промежуточную сеть постоянного тока также подключен блок торможения. Этот блок является резервным, т.к. он работает при аварийном отключении питающей сети. Он помогает облегчить работу механическому тормозу и сохранить двигатели.
Инверторы 1, 2, 3 через двухполюсные выключатели соединены в общую сеть постоянного тока, которая в свою очередь, подключена к выходу рекуператора. Они управляются по закону синусоидальной широтно-импульсной модуляции. Инверторы обеспечивают векторное управление моментом и скоростью АД без необходимости наличия датчика положения и скорости вала.
Рекуператор или сетевой транзисторный инвертор напряжения, управляется также по закону синусоидальной широтно-импульсной модуляции. Он обеспечивает преобразование переменного напряжения в постоянное. Рекуператор поддерживает обмен активной мощности между переменным и постоянным током, синусоидальность формы тока и коэффициент мощности.
Мощность рекуператора равна 300 кВт. Именно такая мощность рекуператора позволяет работать одновременно двум двигателям, каждый из которых отвечает за свою функцию.
Такое исполнение системы позволяет бесперебойно работать экскаватору ЭКГ-8И в условиях большой тряски и вибраций, при низких и высоких температурах окружающей среды (в пределах от -45 0С до +45 0С). А также в условиях высокой запылённости и влажности.
Спецификация элементной базы
Для осуществления модернизации работы и модернизации управления рабочим процессом экскаватора ЭКГ-8И в таблице 4.3 приведена спецификация элементной базы, на которую будет осуществлена модернизация [27].
Наименование Артикул компонента компонента
Изображение
компонента
Асинхронный
двигатель с ко-
роткозамкнутым
ротором
4МТНФ-
400L8Y1
Асинхронный
двигатель с ко- 4АК250М4У
роткозамкнутым З
ротором

Силовой масля-
ный трансформа-
тор
ТМЭ-400
Описание компонента
Исполнение защитное, имеется независимая вентиляция, степень защиты IP20.
Пуск прямой с включением в цепь ротора пускового сопротивления.
Отношение Ммах/Ммш=2,8.
Изоляция обмоток статора и ротора класса «Н».
Соединение фаз обмоток статора и ротора - звезда.
Изменение направления
вращения ротора из состояния покоя.
Исполнение защитное, имеется независимая вентиляция, степень защиты IP44.
Пуск прямой с включением в цепь ротора пускового сопротивления.
Отношение М
Диапазон рабочего климата от -600С до +400С.
Энергосберегательность.
Европейский стандарт CENELEC.
Срок службы более 25 лет.
Обмотки ВН/НН - Y/Y.
Преобразователь
частоты
Эратон-М5
Использование скалярного или векторного управления без датчика скорости и положения вала электродвигателя.
Исполнение на IGBT- модулях с промежуточным звеном постоянного тока. Степень защиты: IP21, IP44, IP54 по ГОСТ 14254. Питание: 380В, 50Гц. Диапазон рабочего климата от -400С до +400С.
Срок службы от 10 лет. Коэффициент мощности 0,96.
КПД 0,97.
Наименование
компонента
Артикул
компонента
Изображение компонента