МОДЕЛИРОВАНИЕ РАБОТЫ КАРЬЕРНОГО ЭКСКАВАТОРА. Программа Факультет Кафедра к защите допустить Зав кафедрой
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

|
Наличие рекуперации энергии в сеть. Наличие автонастройки. Торможение: частотное, динамическое. Настройка токоограничения. Архив аварийных ситуаций. Описание компонента Модернизация экскаватора ЭКГ-8И компонентами, приведенными из таблицы 4.3, позволит достичь следующих показателей:
Вследствие, последних событий в мировой экономики - уменьшения стоимости 1 барреля нефти и, соответственно, увеличения стоимости 1 доллара, остро встал вопрос аналогов зарубежного оборудования. Себестоимость произведённого оборудования на территории России значительно снижает стоимость узлов и агрегатов в промышленной технике. В таблице 4.4 приведены элемент- ные компоненты и их стоимость Российского производства и зарубежных аналогов [27]. Таблица 4.4 - Сравнительная таблица
Сравнительная таблица 4.4, где сравниваются отечественные компоненты с зарубежными аналогами, показывает нам, что при модернизации промышленной техники (в частности экскаватора ЭКГ-8И) Российскими компонентами приводит к снижению затраченных средств на 15-20%. Данная разница положительно сказывается на прибыли компании, которая будет использовать данную технику. Полученную разницу можно направить на повышение заработной платы сотрудников, что положительно скажется на их социальной жизни.
В связи изменением мировой экономики (удорожание нефте- и газопродуктов), энергоснабжение, а точнее её экономия, стала основным направлением в промышленности. Всё сводится к тому, что необходимо снизить электроэнергетические потери. Электродвигатели, которые являются электросиловой частью экскаватора ЭКГ-8И, потребляют около 55-60% электроэнергии в сети. Для снижения этого показателя, было предложено внедрить в систему управления главных привод экскаватора ЭКГ-8И рекуперативный транзисторный бездатчиковый частотнорегулируемый электропривод на основе асинхронных двигателей с короткозамкнутым ротором [28]. Т ОКУП Ci Я-С (4.4) ЭЛЕК При расчёте экономической эффективности применения данного типа частотного преобразователя, предлагается рассчитать срок окупаемости по формуле (4.4): где Токуп - срок окупаемости (месяц), Спреобр - стоимость преобразователя (руб), Сэлек - стоимость сэкономленной электроэнергии за месяц (руб), X - комплексный коэффициент, который определяет значительное снижение эксплуатационных расходов и значение ресурса. В технических характеристиках заявлено, что экономия электрической энергии достигает 20%. Среднемесячную экономию электроэнергии определяем по формуле (4.5): D = t - P - k, (4.5) где D - среднемесячная экономия электроэнергии (кВт*ч), t - время работы электродвигателей за месяц (ч), P - мощность используемого электродвигателя (кВт), k - значение экономии электроэнергии у частотного преобразователя (%). Берём её среднее значение, потому что в конструкции экскаватора используется 3 типа электродвигателя с разной мощностью. Т.к. работа экскаватора ЭКГ-8И является частью тяжёлой промышленности, то рабочее время за месяц будет равняться 720 часам (24 часа в сутки и 30 суток за месяц) [29]: Dl = 720 - 200 - 20 = 28800 кВт*ч; D2 = 720 - 71- 20 = 10224 кВт*ч; D ср 28800 +10224 +10224 3 16416 кВт*ч. D3 = 720 - 71-20 = 10224 кВт*ч; Определяем стоимость сэкономленной электроэнергии по величине тарифа по формуле (4.6): СэЛЕК = DcP S , (4.6) где Сэлек - стоимость сэкономленной электроэнергии за месяц (руб), Dcp - среднемесячная экономия электроэнергии (кВт*ч), S - величина тарифа на электроэнергию (руб/кВт*ч). СЭЛЕК = 16416 • 2,95 = 48427 руб. Принимаем значение X = 1,2. Определяем срок окупаемости по формуле (4.4): 16 месяцев. 930600
Срок окупаемости 16 месяцев, а для горнодобывающего предприятия, период жизни которого составляет 50-70 лет, это срок маленький. Минэкономразвитие в 2017 году предлагает увеличить для крупного производства индексацию на тарифы на 7,5% от ставки тарифа на электроэнергию. Применяя частотное регулирование, можно добиться того, что затраты на электроэнергию через 3 года будут такими же, как в 2017 году используя старое оборудование (на 20% меньше ежегодное потребление электроэнергии на новом оборудовании, чем на старом). 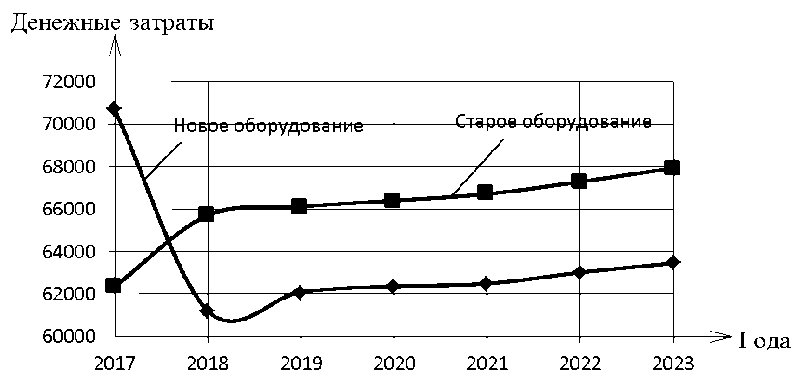 Рисунок 4.7 - Ежегодные затраты на электроэнергию Данную зависимость можно увидеть на рисунке 4.7. Подводя итог, можно сделать вывод, что переоборудовав экскаватор ЭКГ-8И на новый тип оборудования, точка окупаемости наступит через 16 месяцев и будет вести к сокращению на 20% ежегодные выплаты за электрическую энергию. А за 50-70 лет позволит сэкономить значительную денежную сумму, которую можно направить на благоустройство рабочих мест. 5 Безопасность жизнедеятельности
Тема ВКР по выявлению возможности усовершенствования экскаватора ЭКГ-8И для меньшего потребления электроэнергии с сохранением техникоэкономических показателей и с применением 3D модели объекта исследования, связана с использованием электричества, электронных систем управления и с использованием программного обеспечения. На всех этапах жизненного цикла приборов, устройств и систем всех видов должны быть обеспечены условия, при которых они не представляют опасности для человека. С этой целью при их проектировании и конструировании используется определённая концепция и учитываются некоторые общие принципы, позволяющие обеспечить необходимый уровень бнзопасности. Системы, которые состоят из электронных/электрических элементов, используются на протяжении многих лет для выполнения функции безопасности в областях, в которых они применяются. Очень важно для безопасной эксплуатации технологий, чтобы лица, которые ответственные за принятие решений имели руководство по вопросам безопасности.
ГОСТ Р МЭК 61508-2-2012 устанавливает общий подход к вопросам обеспечения безопасности для всего жизненного цикла используемых систем управления. Этот унифицированный подход был принят для разработки рациональной и последовательной технической политики для всех электрических систем обеспечения безопасности. Безопасность достигается за счет использования нескольких систем, в которых используются различные технологии (например, механические, гидравлические, пневматические, электрические, электронные, программируемые электронные). А стратегия безопасности должна учитывать не только все элементы, входящие в состав отдельных систем (датчики, управляющие устройства и исполнительные механизмы), но также подсистемы безопасности. Поэтому ГОСТ Р МЭК 61508-2-2012 может предлагать подход, используемый при рассмотрении системы, связанной с безопасностью, базирующихся на различных видах технологий. Существование большого разнообразия приложений, которые используют системы в разных областях, где они применяются, отличающихся разной степенью сложности, возможными рисками и опасностями, являются признанным фактом. В каждом применении необходимые меры безопасности будут зависеть от многих факторов, которые являются специфичными. ГОСТ Р МЭК 61508-2-2012 включает в себя [30]:
ГОСТ Р МЭК 61508-2-2012 не устанавливает требований к уровню полноты безопасности для любой функции безопасности и не определяет то, как устанавливается уровень полноты безопасности. Однако ГОСТ Р МЭК 61508-22012 формирует основанный на риске концептуальный подход и приводит примеры методов [30].
Связанная с безопасностью одиночная система не всегда предполагает в себе одноканальную архитектуру. При проектировании систем, которые имеют низкий уровень сложности, но при этом связанны с безопасностью, можно достичь более низкий уровень значений целевой полноты безопасности. В настоящее время, способ, который используется при разработке интерактивных системы, направленных на создание пригодных в использовании и полезных системы с учётом особенностей пользователей, их потребностей на основе эргономических принципов является человеко-ориентированное проектирование. При использовании данного подхода увеличивается результативность, эффективность, доступность и устойчивость систем, удовлетворённость пользователя и производительность его труда, а также сводит к минимуму возможность неблагоприятного влияния при использовании систем на здоровье и безопасность человека. Также, могут быть полезны для человека-ориентированного проектирования большое количество исследований в области пригодности использования и эргономики. ГОСТ Р 9241-2013 помогает их результатам быть доступными, а также позволяет использование их при проектировании и модернизации программного и аппаратного обеспечения, организации и планировании эффективной проектной деятельности [31]. ГОСТ Р 9241-2013, описывающий человеко-ориентированный подход к проектированию, помогает дополнить существующие подходы к проектированию систем. Потому что он может быть встроен в существующие методы проектирования (объектно-ориентированный, каскадный и т.д.). Человеко-ориентированные принципы проектирования используются в течении десяти лет. ГОСТ Р 9241-2013 отражает опыт применения этих принципов, установлены требования к человеко-ориентированному проектированию и даны необходимые рекомендации. Также, ГОСТ Р 9241-2013 идентичен международному стандарту, что ещё раз доказывает его правильность [31]. 5.4 Комплекс мероприятий по обеспечению безопасности Для обеспечения безопасного проведения работ, предлагается произвести комплекс мероприятий, который исключит любой шанс возникновения несчастного случая. Т.к. наш объект исследования состоит как из питающей (силовой) части, так из системы управления (слаботочные цепи, цепи управления, цепи питания приводов), то предлагаемый комплекс мероприятий будет отличен друг от друга. Комплекс мероприятий по безопасному проведению работ при работе и техническом обслуживании питающей (силовой части) [32]:
Комплекс мероприятий по безопасному проведению работ при работе с системами управления [32]:
Подводя итог, можно сделать вывод, что помимо строгого выполнения мероприятий по безопасному проведению работ, необходимо, чтобы на рабочем месте присутствовали средства защиты и оказания первой медицинской помощи. Они должны быть прошедшими соответствующую проверку и с действующим сроком службы. ЗАКЛЮЧЕНИЕ В ходе выполнения выпускной квалификационной работы было произведено исследование рабочего процесса экскаватора ЭКГ-8И с существующим на данный момент типом оборудования. Было доказано, что данный тип экскаватора справляется с заданной задачей, т.к. все рассчитанные характеристики совпадали с паспортными значениями. Затем, была построена 3D модель рабочего цикла экскаватора ЭКГ-8И с занесением в модель паспортные значения. Визуально показан полный рабочий цикл. Усовершенствуя данную модель дальше можно получить универсальную модель для всех существующих экскаваторов, что может проектировщика снизить затраты при создании и усовершенствовании типовых экскаваторов. После, была предложена идея по модернизации экскаватора ЭКГ-8И на более совершенное и эффективное оборудование с меньшим уровнем электропотребления. Подсчитана окупаемость данной модернизации и представлен график, который показывает на 7 лет вперёд экономическую ситуацию для предприятия. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
30 ГОСТ Р МЭК 61508-2-2012. Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. — М.: Стандартинформ 2012.
Листинг программного кода void fastcall TFormArrows3d:TrackBar1Change(TObject *Sender) { Cube4->RotationAngle->Y = TrackBar1->Value; } // void fastcall TFormArrows3d:TrackBar2Change(TObject *Sender) { Kofsh1->RotationAngle->X = TrackBar2->Value [19]; } // void fastcall TFormArrows3d:TrackBar3Change(TObject *Sender) { Kofsh2->Position->Y = TrackBar3->Value; } // void fastcall TFormArrows3d:TrackBar4Change(TObject *Sender) { Dno1->RotationAngle->X = TrackBar4->Value [20]; } // void fastcall TFormArrows3d:TrackBar5Change(TObject *Sender) { Vag->Position->Y = TrackBar5->Value; } // void fastcall TFormArrows3d:TrackBar6Change(TObject *Sender) { Cube4->Position->Z = TrackBar6->Value; Cube3->Position->Z = TrackBar6->Value; Листинг программного кода void fastcall TFormArrows3d:Button1Click(TObject *Sender) { for(int i=59; i>=0; i--) { Vag->Position->Y = -(float)i/40; Sleep(50); Application->ProcessMessages(); } for(int i=0; i<60; i++) { Cube4->Position->Z = -(float)i/40; Cube3->Position->Z = -(float)i/40; Sleep(50); Application->ProcessMessages(); } for(int i=0; i>=-5; i--) { Kofsh2->Position->Y = -(float)i/40; Sleep(50); Application->ProcessMessages(); } for(int i=0; i>=-100; i--) { Kofsh1->RotationAngle->X = i; Sleep(25); Application->ProcessMessages(); } for(int i=59; i>=30; i--) { Cube4->Position->Z = -(float)i/40; Cube3->Position->Z = -(float)i/40; Sleep(50); Application->ProcessMessages(); } for(int i=0; i<90; i++) { Cube4->RotationAngle->Y = i; Sleep(50); Application->ProcessMessages(); } for(int i=-5; i>=-15; i--) { Kofsh2->Position->Y = -(float)i/40; Sleep(50); Application->ProcessMessages(); } for(int i=0; i<100; i++) { Dno1->RotationAngle->X = i; Sleep(15); Application->ProcessMessages(); } for(int i=99; i>=0; i--) { Dno1->RotationAngle->X = i; Sleep(15); Application->ProcessMessages(); } for(int i=15; i>=0; i--) { Kofsh2->Position->Y = (float)i/40; Sleep(50); Application->ProcessMessages(); } for(int i=90; i>=0; i--) { Cube4->RotationAngle->Y = i; Sleep(50); Application->ProcessMessages(); } for(int i=-100; i<=0; i++) { Kofsh1->RotationAngle->X = i; Sleep(25); Application->ProcessMessages(); } } |