Силлабус Волоконно-оптические линии связи АУ-103 рус ДОТ. Программа Волоконнооптические линии связи
 Скачать 2.45 Mb. Скачать 2.45 Mb.
|

3.Переборов А.С., Брылеев А.М., Сапожников В.В.Теоретические основы автоматики и телемеханики. Учебник для вузов. Третье издание. М.: Транспорт,— 384 с.4.Иванов А. А. Автоматизация технологических процессов и производств: учебное пособие / А. А.Иванов. - 2-e изд., испр. и доп. - Москва: Форум: НИЦ ИНФРА-М, 2015. -224 с. - (Высшее образование). - ISBN 978-5-91134-948-6. -5.Фельдштейн Е. Э. Автоматизация производственных процессов в машиностроении учебное пособие / Е. Э. Фельдштейн, М. А. Корниевич. - Москва : ИНФРА-М ; Мн. : Нов. знание, 2015. - 264 с.: ил. - ISBN 978-5-16-010531-4. - Режим доступа: 6.Иванов А. А. Автоматизация технологических процессов и производств [Текст] : учебное пособие для вузов / А. А. Иванов. - Москва : ФОРУМ, 2011. - 224 с. : ил., табл. - (Высшее образование). - Библиогр.: с. 219-220. - Гриф УМО. - В пер. - ISBN 978-5-91134-511-2. Тема 3. Автоматизированные системы управления технологическими процессами Основные вопросы/план темы: 1.Типовая структура централизованной АСУ ТП Тезисы лекции Развитие экономико-математических методов управления с широким использованием современной вычислительной техники позволило существенно облегчить работу оператора при управлении сложными технологическими объектами. В результате появились человеко- машинные системы управления технологическими процессами, в которых обработка информации и формирование оптимальных управлений осуществляются человеком с помощью управляющей вычислительной машины (УВМ). УВМ в этом случае является многоканальным информационно-управляющим устройством в системе автоматизированного управления технологическим процессом. В зависимости от распределения информационных и управляющих функций между человеком и УВМ, между УВМ и средствами контроля и регулирования возможны различные принципы построения АСУ ТП. Наибольшее распространение в промышленной практике нашли три принципа построения АСУ ТП: централизованные АСУ ТП, АСУ ТП с супервизорным управлением и децентрализованные распределенные АСУ ТП. Типовая структура централизованной АСУ ТП (см. рисунок 2.3) включает в себя устройство связи с объектом (УСО) и УВМ, осуществляющую централизованное управление одним или несколькими технологическими процессами. Надежность всего комплекса определяется в этом случае надежностью УСО и УВМ, и при выходе их из строя нормальное функционирование технологического оборудования невозможно. 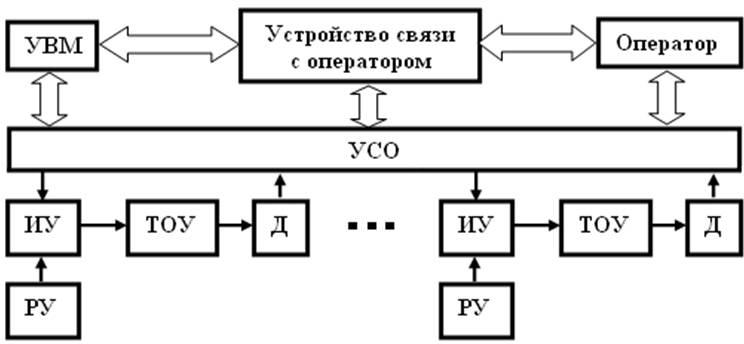 Рисунок 2.3 — Типовая структура централизованной АСУ ТП Характерным примером централизованной АСУ ТП является система, УВМ которой непосредственно вырабатывает оптимальные регулирующие воздействия и с помощью соответствующих преобразователей передает команды управления на исполнительные устройства (механизмы). Централизованные АСУ ТП, УВМ которых работают в таком режиме, называются системами с непосредственным или прямым цифровым управлением (ПЦУ). В АСУ ТП с ПЦУ оператор должен иметь возможность изменять уставки, контролировать избранные переменные, варьировать диапазоны допустимого изменения переменных, изменять параметры настройки и иметь доступ к управляющей программе. Для обеспечения этих функций необходимо иметь сопряжение (человек — машина) в виде пульта оператора и средств отображения информации. Применение УВМ в режиме ПЦУ позволяет строить программным путем системы регулирования по возмущению, комбинированные системы каскадного и многосвязного регулирования, учитывающие связи между отдельными частями объекта управления. ПЦУ позволяет реализовать не только оптимизирующие функции, но и адаптацию к изменению внешней среды и переменным параметрам объекта. В системах с ПЦУ упрощается реализация режимов пуска и остановки процессов, переключение с ручного управления на автоматическое, операции переключения исполнительных механизмов. Главный недостаток систем с ПЦУ заключается в том, что при отказе в работе УВМ объект теряет управление. Несмотря на высокую надежность всех средств системы, отказы в УВМ возможны, и это обстоятельство необходимо особо учитывать при построении АСУ ТП с ПЦУ. Более широкими возможностями и лучшей надежностью обладают АСУ ТП, в которых непосредственное регулирование объектами ТП осуществляют ЛР, а УВМ выполняет функции «советчика» в так называемом супервизорномрежиме. По данным, поступающим от датчиков (Д) локальных подсистем через УСО, УВМ вырабатывает значение уставок в виде сигналов, поступающих непосредственно на входы систем автоматического регулирования. Вопросы для закрепления 1.Что такое и как работает централизованные АСУ ТП, УВМ? 2.В чем заключается главный недостаток систем с ПЦУ? 3.Методы описания ТП как объектов управления. 4.Типовая структура централизованной АСУ ТП Литература: 1.Казагачев В.Н.,Айткалиев Г.С., Бухарбаев М.А. Основы автоматики и автоматизация технологических процессов: учебное пособие- Алматы: New book.2021.-208c 2.Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В.Теоретические основы железнодорож-ной автоматики и телемеханики: Учебник для вузов ж.-д. транспорта/ Под ред. В.В. Сапожникова. — М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте»,. — 394 с |