ТАУ. Лабораторная работа №0. Лаб 0. Работа с пакетом simulink в среде matlab
 Скачать 2.33 Mb. Скачать 2.33 Mb.
|

|
РАБОТА С ПАКЕТОМ SIMULINK в среде MATLAB  Целью работы является изучение основ работы с пакетом Simulink в среде Matlab [2 ]. 1.1 Основные сведения о пакете Simulink 4.0 В состав системы MATLAB 6.5 входит пакет моделирования динамических систем — Simulink 4.0. Пакет Simulink является ядром интерактивного программного комплекса, предназначенного для математического моделирования линейных и нелинейных динамических систем и устройств, представленных своей функциональной блок-схемой, именуемой S-моделью, или просто моделью. При этом возможны различные варианты моделирования: во временной области, в частотной области, с событийным управлением и т. д. Для построения функциональной блок-схемы моделируемых устройств Simulink имеет обширную библиотеку блочных компонентов и удобный редактор блок-схем. Он основан на графическом интерфейсе пользователя и по существу является типичным средством визуально-ориентированного программирования. Используя палитры компонентов (библиотечные наборы), пользователь с помощью мыши переносит нужные блоки с палитр на рабочий стол пакета Simulink и соединяет линиями входы и выходы блоков. Таким образом, создаётся блок-схема системы или устройства, то есть модель. Simulink автоматизирует следующий, наиболее трудоемкий этап моделирования, он составляет и решает сложные системы алгебраических и дифференциальных уравнений, описывающих заданную функциональную схему (модель), обеспечивая удобный и наглядный визуальный контроль за поведением созданного пользователем виртуального устройства. Пользователю достаточно уточнить (если нужно) вид анализа и запустить Sinuilink в режиме симуляции созданной модели системы или устройства. В дальнейшем, для этого процесса, мы будем использовать термин «моделирование». Средства визуализации результатов моделирования в пакете Simulink весьма наглядны . Кроме того, Simulink практически мгновенно меняет математическое описание модели по мере ввода новых блоков, даже в том случае, когда этот процесс сопровождается сменой порядка системы уравнений и ведет к существенному качественному изменению поведения системы. Особая ценность пакета Simulink заключается в обширной, открытой для изучения и модификации библиотеке компонентов. Она включает источники сигналов с практически любыми временными зависимостями, масштабирующие, линейные и нелинейные преобразователи с разнообразными формами передаточных характеристик, квантующее устройство, интегрирующие и дифференцирующие блоки и т. д. В библиотеке имеется целый набор виртуальных регистрирующих устройств - от простых измерителей, типа вольтметра или амперметра, до универсальных осциллографов, позволяющих просматривать временные зависимости выходных параметров моделируемых систем - например, токов и напряжений, перемещений, давлений и т. п. Имеется даже графопостроитель для создания фигур в полярной системе координат, например, фигур Лиссажу и фазовых портретов колебаний. Simtilink имеет средства анимации и звукового сопровождения. А в дополнительных библиотеках можно отыскать итакие “дорогие приборы”, как анализаторы спектра сложных сигналов, многоканальные самописцы и средства анимации. И, наконец, важным достоинством пакета является возможность задания в блоках произвольных математических выражений, что позволяет решать типовые задачи, пользуясь примерами пакета Simulink или же просто задавая новые выражения, описывающие работу моделируемых пользователем систем и устройств. Важным свойством пакета является и возможность задания системных функций (S-функций) с включением их в состав библиотекSimulink. Важное достоинство Simulink — это интеграция не только с системой MATLAB, но и с рядом других пакетов расширения, что обеспечивает по существу, неограниченные возможности примёнения Simulink для решения практически любых задач имитационного и событийного моделирования. Пакет Simulink обладает следующими основными возможностями: интегрированный браузер моделей (Windows 95/98/NT); возможность увеличения блок-схем (zooming); блок Scope, способный работать с несколькими портами; интегрированные возможности линейного анализа; графический интерфейс для описания свойств сигнала; интегрированный браузер библиотек (только Windows 95/98/; поддержка различных типов данных и их преобразований; поддержка комплексных чисел при работе с базовыми блоками и комплексно-вещественные преобразования; оптимизация скорости и использования памяти при моделировании; многоцветные изображения, метки портов и маскированных блоков; блоки, определяемые пользователем, с поддержкой множества портов и различными интервалами дискретизации. После инсталяции Simulink (отдельно от MATLAB или в его составе) автоматически интегрируется с MATLAB. Внешне это выражается появлением кнопки Simulink в панели инструментов (церед кнопкой ?) системы MATLAB. При нажатии этой кнопки открывается окно интегрированного браузера библиотек. Пользовательский интерфейс окна браузера выполнен в общем стиле, характерном для Проводника Windows. Это позволяет отказаться от детального описания его особенностей. Отметим лишь главные возможности работы с браузером. В окне браузера содержится дерево компонентов библиотек Simulink. Для просмотра того или иного раздела библиотеки достаточно выделить его мышью - в правой части окна Simulink Browser Library появится набор пиктограмм компонентов активного раздела библиотеки. С помощью меню браузера или кнопок его панели инструментов можно открыть окно для создания новой модели или загрузить существующую. Работа с Simulink происходит на фоне открьггого окна системы MATLAB, в котором можно наблюдать за выполняемыми операциями - если их вывод предусмотрен программой моделирования. Основные блоки моделей динамических систем в пакете Simulink системы MATLAB 6.5 описаны в Приложении 1. При выполнении лабораторных работ по ТАУ могут использоваться два режима исследований – режим численного интегрирования и режим анализа линейных систем. В режиме численного интегрирования могут рассматриваться любые модели динамических систем – линейные, нелинейные и т.д. На объект могут подаваться любые входные сигналы. Однако результаты моделирования ограничены получением переходных процессов. Инструменты линейного анализа могут работать только с линейными моделями. При этом могут быть получены все основные характеристики линейных систем – переходная и передаточная характеристики по любому входу и выходу, частотные характеристики, годограф Найквиста, размещение нулей и полюсов системы и др. 1.2 Настройка параметров моделирования в режиме численного интегрирования Прежде чем запустить загруженную модель, необходимо установить общие параметры моделирования. Для этого следует выполнить команду SimulationParameters…в меню Simulationокна Simulink. Появится окно установки параметров моделирования. Это окно имеет ряд вкладок с довольно большим числом параметров. Для данной лабораторной работы нужна вкладка, открытая по умолчанию, - Solver (Решатель). Эта вкладка позволяет установить параметры решающего устройства системы моделирования Simulink. К числу важнейших параметров решателя относится время моделирования – Simulationtime. Оно задается начальным временем Start time (для данной лабораторной работы - 0) и конечным временем Stop time . Требуемое время моделирования зависит от динамических свойств исследуемой системы и обычно подбирается итеративно. 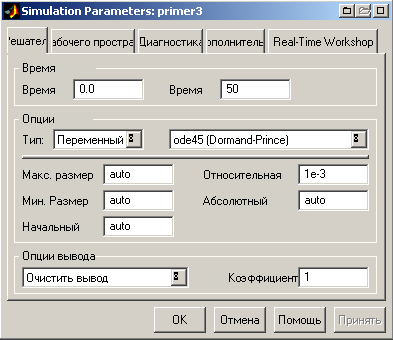 Рис. 1. Окно установки параметров моделирования Первостепенное значение имеют две опции решателя в поле Solveroptions: тип решения и метод решения. Возможны два типа решения: Variable – stepsolvers – решение с переменным шагом. Fixed– stepsolvers – решение с фиксированным шагом. Для данной лабораторной работы следует выбрать решение с переменным шагом. В этом случае шаг автоматически уменьшается, если скорость изменения результатов в процессе решения возрастает. И напротив, если результаты меняются слабо, шаг решения автоматически увеличивается. Вторая из указанных опций – выбор метода моделирования. Меню методов моделирования предлагает достаточно широкий спектр явных методов четвертого – пятого порядков, способных обеспечить высокое качество интегрирования. Для рассматриваемых задач вполне подходящим является, например, метод пятого порядка ode5 [Dormand-Prince], Следующие три параметра - значения опции auto – обычно задаются автоматически, но в особых случаях их можно ввести явно. Maxstepsize – максимальный шаг интегрирования системы однородных дифференциальных уравнений; Minstepsize – минимальный шаг интегрирования; Initialstepsize – начальный шаг интегрирования. Важен и такой параметр моделирования, как точность интегрирования: Relativetolerance– относительная погрешность интегрирования; Absolutetolerance – абсолютная погрешность интегрирования. По умолчанию они заданы соответственно равными Если, например, графики результатов моделирования выглядят недостаточно гладкими, составленными из отдельных фрагментов, это указывает на необходимость уменьшения указанных значений погрешностей. Однако слишком малые погрешности могут вызвать значительно увеличить время вычислений. Не оптимально выбранные значения погрешности (как очень малые, так и очень большие) могут вызвать неустойчивость и даже «зацикливание» процесса моделирования. Для данных лабораторных работ достаточно принять автоматические настройки. 1.3 Линейный анализ с помощью LTI-Viewer Линейный анализ проводится с помощью инструмента LTI-Viewer и предназначен для анализа линейных стационарных систем. С помощью данного инструмента можно легко построить частотные характеристики исследуемой системы, получить ее отклики на единичные ступенчатое и импульсное воздействия, найти нули и полюса системы и т.д. Для работы с LTI-Viewer в Matlab 6.5 нужно 1. Выполнить команду Tools\Linear Analysis... окна Simulink-модели. В результате выполнения команды откроется окно Model_Inputs_and_Outputs как это показано на рис. 2, а также пустое окно Simulink LTI-Viewer . . 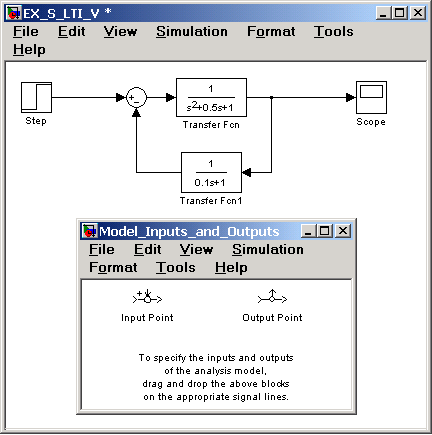 Рис.2. Исследуемая модель и окно Model_Inputs_and_Outputs инструмента LTI-Viewer 2. Установить блок Input Point на входе и блок Output Point на выходе исследуемой системы, как это показано на рис. 3. 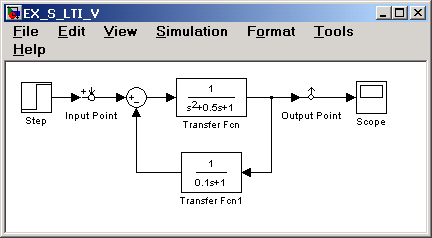 Рис. 3 Исследуемая модель с установленными блоками Input Point и Output Point 3. В окне LTI Viewer выполнить команду Simulink\Get Linearized Model. Данная команда выполняет линеаризацию модели и строит реакцию системы на единичное ступенчатое воздействие. Результат выполнения данного пункта показан на рис. 4. 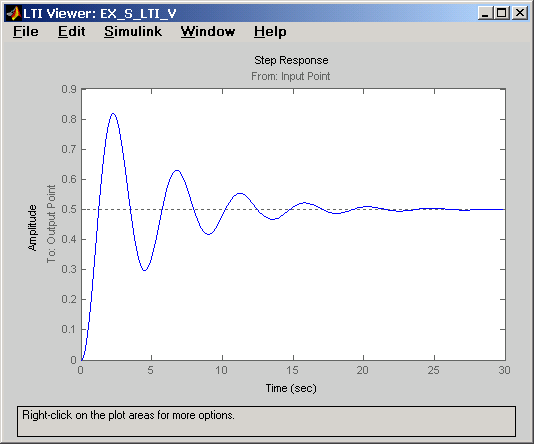 Рис. 4. Реакция системы на единичное ступенчатое воздействие. Замечание. При работе в Матлаб 2009 процедура запуска LTI-Viewer имеет некоторые отличия. Для запуска необходимо: Правой клавишей мыши выбрать входную точку (LinearizationPoint->InputPoint). Рядом с линией появится изображение входной точки. Правой клавишей мыши выбрать выходную точку (Linearization Point->Output Point). Рядом с линией появится изображение выходной точки. Запустить процедуру линейного анализа (Service (или Tools)-> Control Design-> Linear Analysis). Выполнить линеаризацию модели (в открывшемся окне нажать кнопку Linearize Model). Если система имеет несколько входов и выходов и для всех них установлены блоки Input Point и Output Point, то на графике будет отображено несколько окон показывающих реакцию на каждом выходе при воздействии на каждый вход. 5. Для получения остальных характеристик системы необходимо выполнить команду Edit\Plot Configuration... в окне LTI Viewer. В результате выполнения этой команды откроется окно Plot Configuration, показанное на рис. 5. 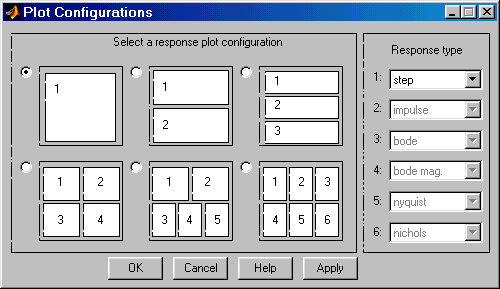 Рис. 5. Окно Plot Configuration В открывшемся окне можно выбрать число отображаемых графиков (панель Select a response plot configuration) и вид отображаемых графиков (панель Response type). Для построения доступны следующие графики (диаграммы): step – реакция на единичное ступенчатое воздействие. impulse – реакция на единичное импульсное воздействие. bode – логарифмические амплитудная и фазовая частотные характеристики. bode mag – логарифмическая амплитудная частотная характеристика. nyquist – диаграмма Найквиста. nichols – годограф Николса. sigma – сингулярные числа. pole/zero – нули и полюса системы. На рис. 6 приведен пример окна LTI-Viewer с несколькими различными характеристиками исследуемой системы. 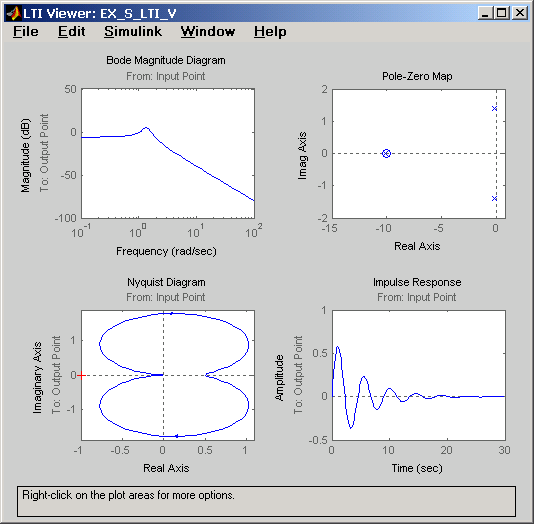 Рис. 6. Окно LTI-Viewer с несколькими графиками. Настройку внешнего вида графиков можно выполнить с помощью команды Edit\Line Styles… (установка вида и цвета линий, вида маркеров). 1.4. Настройка LTI-Viewer С помощью команды Edit\Viewer Preferences… выполняются следующие виды настройки: 1. Установка единиц измерения (вкладка Units). Вид окна при настройке единиц измерения показан на рис.7 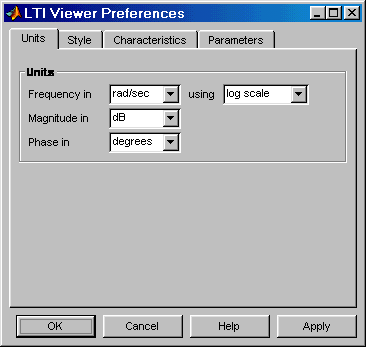 Рис. 7 Вкладка Units Вкладка Units окна позволяет задать единицы измерения частоты (рад/c или Гц), уровня (dB или абсолютные единицы), фазы (градусы или радианы), а также установить вид шкалы частоты (логарифмический или линейный). 2. Установка стиля графиков (вкладка Style). На данной вкладке можно выполнить настройку шрифтов окна LTI-Viewer (панель Fonts), выбрать цвет осей графиков (панель Colors), а также задать нанесение линий сетки на графики (флажок Show grids). Внешний вид вкладки Style показан на рис. 8. 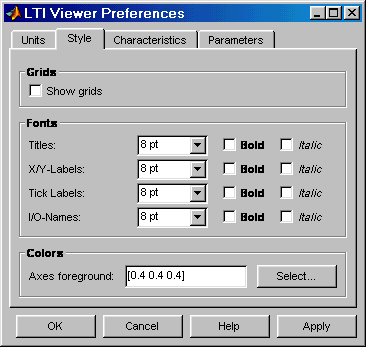 Рис. 8. Вкладка Style 3. Установка параметров расчета переходного процесса (вкладка Characteristics). Данная вкладка позволяет задать параметры установленные "по умолчанию" для вычисления времени нарастания и времени переходного процесса. По умолчанию LTI-Viewer вычисляет время переходного процесса как время, когда переходная функция входит в 2% зону и больше не выходит из нее (параметр Show setting time within). Также можно изменить параметры для вычисления времени переходного процесса (Show rise time from). На данной вкладке имеется также флажок Unwrap phase, установка которого позволяет избежать отображения разрывов в фазо-частотной характеристике, связанных с областью определения функции arctg, вычисляющей фазовый сдвиг. Внешний вид вкладки Characteristics показан на рис. 9. 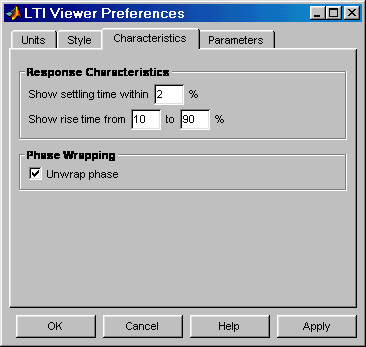 Рис. 9 Вкладка Characteristics 4. Установка интервалов времени и частоты (вкладка Parameters). На данной вкладке задается временной интервал для расчета переходного процесса (панель Time Vector), а также интервал частот для расчета частотных характеристик (панель Frequency Vector). Внешний вид вкладки Parameters показан на рис. 10. 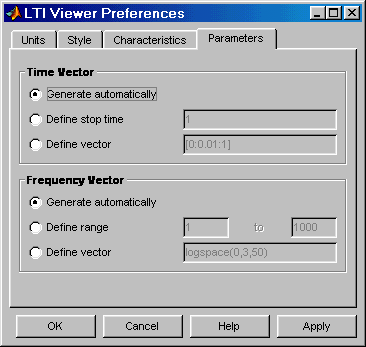 Рис. 10. Вкладка Parameters Векторы времени и частоты можно вычислять в автоматическом режиме (Generate automatically), ввести конкретное значение для времени окончания расчета (Define stop time) или диапазон значений по частоте (Define range), либо задать непосредственно вектор значений времени или частоты (Define vector). 1.5 Программа работы и методические указания 1.5.1 Методом численного интегрирования провести исследование динамических характеристик системы, структурная схема которой представлена на рис.12, а схема набора в пакете Simulink – на рис.13 . Численные значения параметров схемы приведены в таблице 1. 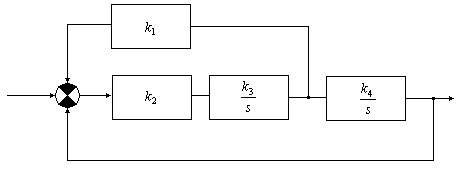 Рис. 12. Структурная схема динамического звена второго порядка Необходимо определить устойчивость и качество данной системы путем моделирования ее переходных процессов. Исследовать влияние на устойчивость и качество работы системы значения коэффициента передачи 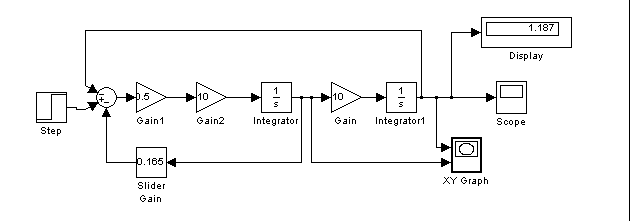 Рис.13 Схема набора модели в пакете Simulink. Таблица 1.
1.5.2. Методами линейного анализа провести исследование динамических характеристик электропривода постоянного тока, структурная схема которого представлена на рис.14. Численные значения параметров схемы приведены в таблице 2. Здесь Определить устойчивость и качество полученной модели привода, путем моделирования во временной области. 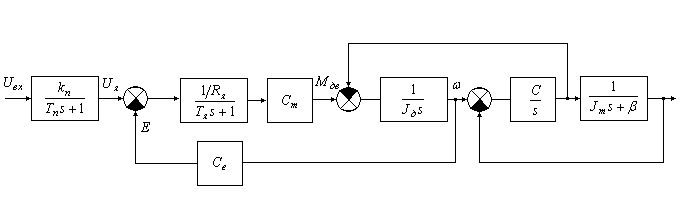 Рис. 14 Структурная схема привода постоянного тока Таблица 2
1.4. Содержание отчета Цель работы. Структурные схемы и схемы набора. Графики по всем пунктам программы. Выводы по работе. Список литературы Дьяконов В.П. MATLAB 6/6.1/6.5 + SIMULINK 4/5 в математике и моделировании.– М.: СОЛОН-Пресс, 2003 – 565 с. Дьяконов В.П. SIMULINK 4. Специальный справочник. - Санкт-Петербург, 2002, - 518 с. Черных. И.В. "Simulink: Инструмент моделирования динамических систем" // Exponenra.ru Приложение 1 Основные блоки пакета Simulink системы MATLAB 6.5 Математические блоки (Math) Б 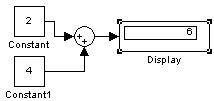 лок сложения / вычитания сигналов. лок сложения / вычитания сигналов. Параметры блока: Icon shape – установления вида представления блока (круглый или квадратный); List of signs – задание числа входов и операций. Б 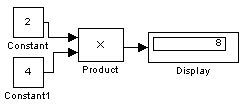 лок Product (Умножение) предназначен для умножения и деления ряда входных сигналов. Параметр блока – Number of inputs – определяет число входов звена. лок Product (Умножение) предназначен для умножения и деления ряда входных сигналов. Параметр блока – Number of inputs – определяет число входов звена.Б Б   лок Gain служит для масштабирования данных (умножения их на заданный коэффициент – константу). В этом блоке константа вводится в окне параметров (по умолчанию 1). лок Gain служит для масштабирования данных (умножения их на заданный коэффициент – константу). В этом блоке константа вводится в окне параметров (по умолчанию 1).Блок Переменный коэффициент (Slider Gain) позволяет плавно менять коэффициент передачи блока используя весьма наглядный инструмент – ползунок (слайдер). Окно параметров блока позволяет задавать верхнюю и нижнюю границы изменения коэффициента, а также с помощью мыши устанавливать сладер в желаемом положении. Источники сигналов (Sources) И 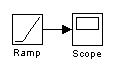 сточник линейно нарастающего воздействия вида сточник линейно нарастающего воздействия вида Параметры источника: Slope – угловой коэффициент временной зависимости k; Start time – время, начиная с которого воздействие нарастает; Initial value – начальный уровень воздействия. И  сточник воздействия в виде одиночного перепада . Параметры источника: сточник воздействия в виде одиночного перепада . Параметры источника: Step time – время появления перепада (скачка); Initial value – начальное значение воздействия (до перепада); Final value – конечное значение воздействия (после перепада); Sample time – эталонное время.  Генератор белого шума (Bland Limited White Noice) служит для создания шумового сигнала с заданной мощностью, равномерно распределенной по частоте. Генератор характеризуется мощностью шума Noice Power, эталонным временем Sample time и числом Seed, служащим для инициализации генератора случайных чисел. Генератор фактически является квантователем непрерывного сигнала, представляющего белый шум. Виртуальные регистраторы (Sinks) В  иртуальный осциллограф позволяет представить результаты моделирования в виде временных диаграмм тех или иных процессов в форме, напоминающей осциллограммы современного высокоточного осциллографа с оцифрованной масштабной сеткой. иртуальный осциллограф позволяет представить результаты моделирования в виде временных диаграмм тех или иных процессов в форме, напоминающей осциллограммы современного высокоточного осциллографа с оцифрованной масштабной сеткой.Окно параметров осциллографа содержит следующие основные параметры: Number of axes – число осей (каналов) осциллографа; Time range – пределы временного интервала; Tick labels – вывод / скрытие отметок по осям; Sampling – установка временных соотношений: Decimation (в десятичных долях времени со значением по умолчанию 1) или Sample Time (в тактах эталонного времени, по умолчанию 0). Параметр Number of axes позволяет превратить одноканальный осциллограф в многоканальный. При этом осциллограф приобретает несколько входных портов, к которым можно подключать различные сигналы. В окне параметров осциллографа с вкладкой Data history можно задать максимальное число точек осциллограмм для хранения и задать параметры хранения осциллограмм в рабочем пространстве системы MATLAB. Назначение кнопок панели инструментов виртуального осциллографа представлено на рисунке 5. В  иртуальный дисплей – устройство представления цифровой информации. Это одно из самых простых устройств. В окне параметров дисплея устанавливается формат отображения данных Format, представление данных в десятичных долях времени Decimation и в тактах эталонно времени Sample time. Можно также выбрать представление вещественных данных в формате с плавающей точкой (флажок Floating point). Дисплей обеспечивает динамическое отображение данных, то есть можно наблюдать их изменение в процессе моделирования. иртуальный дисплей – устройство представления цифровой информации. Это одно из самых простых устройств. В окне параметров дисплея устанавливается формат отображения данных Format, представление данных в десятичных долях времени Decimation и в тактах эталонно времени Sample time. Можно также выбрать представление вещественных данных в формате с плавающей точкой (флажок Floating point). Дисплей обеспечивает динамическое отображение данных, то есть можно наблюдать их изменение в процессе моделирования.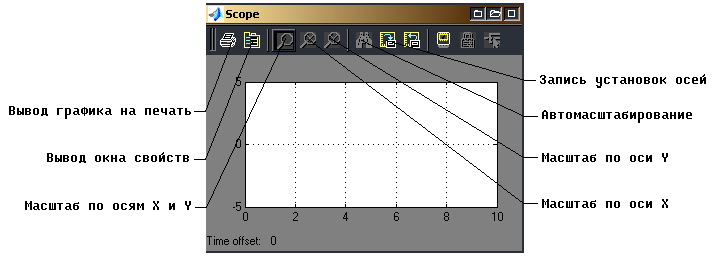 Рисунок 5. Назначение кнопок панели инструментов окна осциллографа Рисунок 5. Назначение кнопок панели инструментов окна осциллографа Сигналы и системы(Signal & Systems) Б 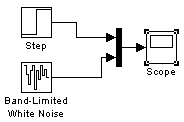 лок Mux служит для объединения изображений нескольких сигналов. В окне параметров блока устанавливается число входов и один из трех вариантов изображения блока. лок Mux служит для объединения изображений нескольких сигналов. В окне параметров блока устанавливается число входов и один из трех вариантов изображения блока.Непрерывные блоки (Continuous)  Блок интегрирования (Integrator) выполняет функции интегрирования входных данных (сигналов). Окно параметров интегрирующего блока содержит следующие параметры: External reset (внешний сброс) – тип внешнего управляющего сигнала, выбираемый из раскрывшегося списка (none - нет, rising - нарастающий, falling - спадающий, either - любой); Initial condition source – источник начального значения выходного сигнала при интегрировании. В раскрывающемся поиске можно выбрать внутренний (internal) или внешний (external) источник; Initial condition (начальное состояние) – установка начального значения выходного сигнала при интегрировании (в виде числа, по умолчанию 0); Limit output – включение / отключение ограничения выходного сигнала; Upper saturation limit – верхний предел ограничения выходного сигнала (по умолчанию – inf, то есть +?); Lower saturation limit – нижний предел ограничения выходного сигнала (по умолчанию – inf, то есть - ?); Show saturation port – управляет отображением порта, выводящего уровни ограничения выходного сигнала; Show state port – управляет отображением порта состояния системы; Absolute tolerance – абсолютная погрешность (по умолчанию автоматический выбор – auto). 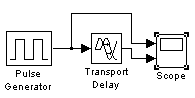 Блок фиксированной задержки (Transport Delay) обеспечивает временную задержку входного сигнала на заданное время. Параметры блока: Time Delay – время задержки (по умолчанию 1); Initial input – начальный уровень входа (по умолчанию 0); Buffer size – размер буфера, выделяемого под задержанный сигнал, в байтах (число, кратное 8, по умолчанию 1024 байт); Pade order (for Linearization) – порядок линеаризации Паде (по умолчанию 0, но может задаваться как целое положительное число для повышения точности линеаризации). Н 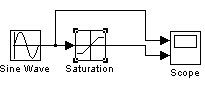 елинейные блоки (Nonlinear) елинейные блоки (Nonlinear)Блок насыщения (Saturation) представляет собой нелинейное устройство, сигнал на входе которого равен выходному сигналу до тех пор, пока не достигает порогов ограничения: верхнего Upper limit или нижнего Lower limit. После этого сигнал перестает изменяться. Наиболее характерно применение ограничителя для ограничения синусоидальных сигналов. Р 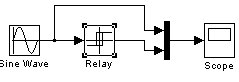 елейный блок имеет разрывную передаточную функцию с гистерезисом (или без него), подобную передаточной функции хорошо известного триггера Шмитта. Если сигнал на входе меньше некоторого порога, то на выходе получается сигнал одного уровня (обычно низкого). Если при спаде сигнала достигается другой порог, то сигнал на выходе также скачком меняется. елейный блок имеет разрывную передаточную функцию с гистерезисом (или без него), подобную передаточной функции хорошо известного триггера Шмитта. Если сигнал на входе меньше некоторого порога, то на выходе получается сигнал одного уровня (обычно низкого). Если при спаде сигнала достигается другой порог, то сигнал на выходе также скачком меняется. В окне параметров блока можно задать уровни сигнала на выходе при включенном и выключенном состоянии, а также верхний и нижний пороговые уровни срабатывания. |