пример расчет транс. Расчёт характеристик трансформатора и электрических двигателей
 Скачать 0.86 Mb. Скачать 0.86 Mb.
|

1. Двигатель постоянного тока с независимым возбуждением1.1 Теоритический материал двигателя постоянного тока. Общие сведения.Двигатели постоянного тока применяются в различных промышленных, транспортных системах, в которых необходимо осуществлять плавное регулирование скорости вращения или выдерживать постоянство момента (прокатные станы, лифты, металлорежущие станки). Электродвигатель постоянного тока (ДПТ) - электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию. Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора. Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом. Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться. Практическое применение ДПТ нашёл Б. С. Якоби в 1839, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту. Электропривода с ДПТ являлись до недавнего времени основным видом регулируемого ЭП с достаточно высокими показателями качества. Наиболее распространенной серией двигателя постоянного тока остается серия – 2П в диапазоне мощностей от 0,13 до 200 кВт различного исполнения. Усовершенствование двигателей привело к разработке новой серии – 4П с улучшенными удельными показателями, где по сравнению с серией 2П снижена трудоемкость изготовления в 3 раза при уменьшении расхода меди на 30%. Для крановых механизмов выпускаются двигатели серии Д, для металлорежущих станков серии – ПБСТ, ПГТ.[1] ДПТ ПВ при изменении нагрузки на валу в широких пределах мало изменяют свою скорость вращения, поэтому их применяют в тех случаях, когда важно, чтобы рабочая скорость механизма оставалась примерно постоянной (как при холостом ходе, так и нагрузке). Преимущества и недостатки электродвигателей постоянного тока с параллельным возбуждением(ДПТ ПВ): К достоинствам относится: Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление; Легко регулируемая частота вращения; хорошие пусковые характеристики; компактные размеры. Недостатки: ограниченный ресурс коллектора и щёток; дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов; ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока; дороговизна в изготовлении якорей. По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы. Конструкция и принцип работы.Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность. Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом. Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы. Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение. Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди. Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель. Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением. Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток. Конструкция ДПТ представлена на рисунке 1.1.1 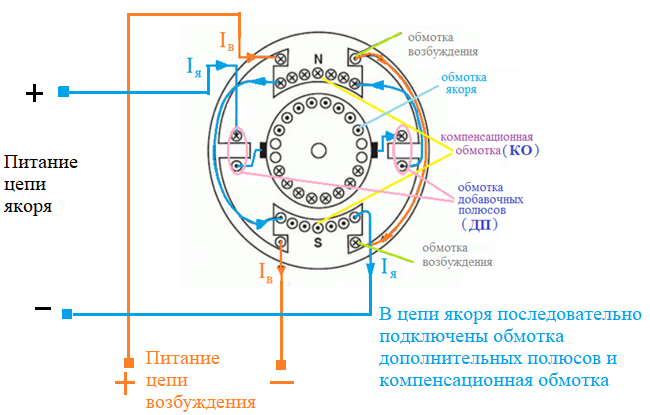 Рисунок 1.1.1 Конструкция ДПТ. Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента. Коммутатор состоит из проводящих сегментов (стержней) из меди, которые представляют собой завершение отдельных катушек проволоки, распределённых вокруг арматуры. Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя. По мере прохождения электрической энергии через щётки и арматуру создаётся крутильная сила в виде реакции между полем двигателя и якорем, вызывающим поворот якоря двигателя. Когда арматура поворачивается, щётки переключаются на соседние полосы на коммутаторе. Это действие переносит электрическую энергию на соседнюю обмотку и якорь.[2] Схема ДПТ представлена на рисунке 1.2.1 Механические характеристики ДПТ ПВ.Эксплуатационные свойства двигателей постоянного тока определяются механическими характеристиками — зависимостью частоты вращения от вращающего момента. Из всего семейства характеристик электропривода с ДПТ ПВ необходимо выделить одну характеристику – естественную, которая определяется при номинальном напряжении, номинальном магнитном потоке и отсутствием дополнительных внешних сопротивлений в якорной цепи. Естественная механическая характеристика двигателя даёт основные представления об электромеханических свойствах двигателя. Она определяет его рабочую номинальную скорость и показывает статическое изменение скорости при изменении нагрузки. Чем выше модуль жёсткости, тем более стабильна работа при широких изменениях момента. Для управления работой двигателя (пуск, торможение, регулирование скорости) осуществляются необходимые изменения параметров и воздействий, определяющих его механические и электромеханические характеристики. Такими параметрами и воздействиями являются: суммарное сопротивление якорной цепи При реостатном способе регулирования сопротивление якорной цепи увеличивается Искусственные характеристики ДПТ ПВ, получаемые путем изменения магнитного потока ДПТ, используются главным образом для регулирования скорости. Этот способ находит широкое применение в автоматизированном электроприводе вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения ДПТ. Регулирование магнитного потока при использовании этого способа производится только в сторону его уменьшения (ослабления) по сравнению с номинальным за счет уменьшения тока возбуждения 1.Увеличение магнитного потока должно вызываться соответствующим увеличением тока возбуждения ДПТ. Однако поскольку номинальный магнитный поток создается номинальным током возбуждения, то увеличение тока возбуждения выше номинального вызывает дополнительный нагрев ДПТ, что недопустимо. 2.Двигатель рассчитан и сконструирован таким образом, что его магнитная система близка к насыщению. Показатели данного способа регулирования скорости ДПТ ПВ следующие :диапазон регулирования 3-4; прямая на графике уходит вверх от естественной характеристики(увеличение тока холостого хода);плавность регулирования определяется плавностью регулирования тока возбуждения; стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока. Способ экономичен, так как регулирование скорости не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат. Таким образом, регулирование скорости изменением магнитного потока целесообразно при постоянной механической мощности нагрузки, что обеспечивает полное его использование при работе на всех искусственных характеристиках. Изменение механических характеристик напряжением, подведённого к якорю двигателя при номинальном потоке, является в регулируемом электроприводе основным управляющим воздействием. Как правило, изменение напряжения возможно только в сторону уменьшения от номинального, причём для мощных двигателей это ограничение является жёстким из-за ухудшения коммутации. В отличие от ослабления поля, изменение напряжения позволяет не только изменять скорость, но и ограничивать ток короткого замыкания. Плавное изменение напряжения на якоре от обеспечивает плавность пуска двигателей. На рисунке 1.2.2 показаны искусственные и естественные механические характеристики ДПТ ПВ  Рисунок 1.1.2 Естественные и искусственные характеристики ЭД. 1.1.4 Режимы торможения двигателя.Выше была рассмотрена работа электропривода в двигательном режиме, чему соответствуют механические характеристики в 1 и 3 квадрантах .Однако этим не исчерпываются возможные режимы работы электропривода и его механические характеристики. Весьма часто в современных электроприводах необходимо быстро и точно остановить механизм или изменить направление его движения. Быстрота и точность, с какой будут проделаны эти операции, во многих случаях определяет производительность машин и механизмов, а иногда и качество выпускаемой продукции. Во время торможения или перемены направления движения(реверса) электропривод работает в тормозных режимах на одной из механических характеристик, соответствующих осуществляемому способу торможения. Для двигателя постоянного тока с параллельным возбуждением возможны следующие тормозные режимы работы: 1) генераторное торможение с отдачей энергии в сеть (рекуперативное торможение); 2) динамическое торможение; 3) торможение противовключением. Режимом рекуперативного торможения называют такой режим, когда электродвигатель при определенных режимах работы привода, в силу своей обратимости, становится генератором, преобразуя кинетическую энергию движущихся масс механизма в электрическую с отдачей ее в питающую сеть. Переход электродвигателя в генераторный режим с отдачей энергии в сеть возможен при скорости привода, превышающей скорость соответствующего идеального холостого хода. При этом ЭДС двигателя, направленная противоположно напряжению сети, становится больше его, и ток в якоре электродвигателя меняет направление на обратное. Практически режим рекуперативного торможения может быть осуществлен: 1) при наличии отрицательного статического момента нагрузки, когда электродвигатель под его действием в сторону вращения, получив ускорение, достигает скорости, превышающей скорость идеального холостого хода; 2) при переходе электродвигателя с большей скорости, полученной ослаблением потока двигателя, на меньшую за счет резкого увеличения магнитного потока. Механические характеристики в данном режиме при различных значениях сопротивлений в якорной цепи электродвигателя являются продолжением характеристик двигательного режима в области второго квадранта . С увеличением скорости при неизменном сопротивления величина тормозного момента возрастает. Увеличение внешнего сопротивления в цепи якоря при неизменном отрицательном статическом моменте на валу электродвигателя приводит к увеличению скорости привода. Режимом электродинамического торможения называют такой режим работы электродвигателя, при котором его якорь отключается от питающей сети и замыкается на внешнее сопротивление, а обмотка возбуждения остается подключенной к сети. В этом режиме двигатель работает в режиме генератора с независимым возбуждением, преобразуя кинетическую энергию движущихся инерционных масс привода в электрическую, которая расходуется на нагрев сопротивлений в якорной цепи. Механические характеристики в режиме динамического торможения расположены во втором квадранте и представляют прямые линии, проходящие через начало координат. Тормозной момент возрастает с уменьшением тормозного сопротивления и наоборот. Наибольшего тормозного эффекта можно достигнуть при замыкании якоря двигателя накоротко. По условиям ограничения тормозного тока замыкание якоря накоротко применяется только для двигателей малой мощности, обладающих сравнительно большим сопротивлением якоря, а также для всех остальных электродвигателей при торможении на малых скоростях. Режимом противовключения называется такой режим работы, когда при вращении электродвигателя под действием инерционных масс привода в электродвигатель из сети поступает ток такого направления, которое соответствует вращению его в противоположную сторону. Переход из двигательного режима в режим противовключения осуществляется изменением полярности напряжения на зажимах якоря. При изменении полярности напряжения необходимо в цепь якоря двигателя ввести внешнее тормозное сопротивление, с тем, чтобы ток в нем, обусловленный суммой напряжения в сети и ЭДС электродвигателя, не превысил допустимого значения. Механические характеристики в режиме противовключения линейны и расположены во втором квадранте. С уменьшением тормозного сопротивления тормозной момент возрастает и наоборот. Режим противовключения может быть получен без изменения полярности напряжения на якоре двигателя при наличии активного момента сопротивления на его валу за счет введения в цепь якоря достаточно большого сопротивления. Установившаяся скорость вращения при этом находится в четвертом квадранте.[3] 1.2 Расчет характеристик двигателя постоянного тока. Двигатель постоянного тока параллельного возбуждения имеет следующие данные: Таблица 1.2.1-Данные ДПТ ПВ
где 1.2.1 Электрическая схема включения двигателя параллельного возбуждения.Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов. Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения: 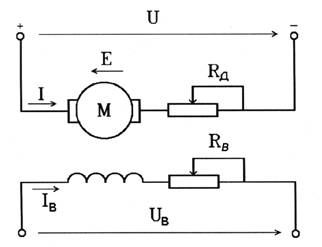 Рисунок 1.2.1 Схема включения двигателя параллельного возбуждения. 1.2.2 Приведение к расчетной температуре сопротивлений.При работе обмотки электрических машин нагреваются, что вызывает изменение их электрического сопротивления. Поэтому сопротивление обмоток необходимо, привести к расчетной температуре 75°С (в таблице вариантов даны сопротивления при 20°С) по формуле(1):
где α=0,004 -температурный коэффициент сопротивления меди Сопротивление обмотки возбуждения при температуре Сопротивление якоря при температуре 1.2.3 Определение номинального тока возбуждения и номинального тока якоря.Ток возбуждения находится по формуле(1.2)
Где Подставим данные в формулу: Ток якоря определяется по формуле(1.3):
где Получим ток якоря номинальный: 1.2.4 Определение номинального момента на валу двигателя:Номинальный момент находится по формуле(1.4):
Где Угловая скорость вращения определяется по формуле(1.5)
Где Подставим значение номинальной скорости в формулу 1.5: Номинальный момент двигателя равен: 1.2.5 Расчёт и построение на одном графике |
 | |
где
По формуле (1.7) можно найти магнитный поток
| | |
где
Подставим значения и получим магнитный поток равный:
Б)Реостатная характеристика.
Искусственная характеристика рассчитывается при сопротивлении регулировочного реостата в цепи якоря
В)Пониженное напряжение.
При пониженном напряжении на якоре
Г)Ослабленный магнитный поток.
При ослабленном магнитном потоке
Сведем в таблицу полученные данные и построим по ним механические характеристики на рисунке 1.1
Таблица 1.1.2-Результаты расчета механических характеристик.
| Тип механической характеристики | | 0 | | | | | |
| М, Н·м | |||||||
| Естественная | | | | | | | |
| При сопротивлении регулировочного реостата в цепи якоря | | | | | | | |
| При пониженном напряжении на якоре | | | | | | | |
| При ослабленном магнитном потоке | | | | | | |
Рисунок 1.1 Типы механических характеристик
Определение процентного изменения скорости вращения для каждой характеристики
Процентное изменение скорости вращения можно определить по формуле(1.8):
| | |
где ω-угловая скорость при β=1
Естественная:
Реостатная:
При пониженном напряжении:
При ослабленном потоке:
1.2.6 Расчёт сопротивления пускового реостата.
Расчёт сопротивления пускового реостата осуществим при пуске двигателя с
| | |
Известно, что Е=kФω. При пуске двигателя (в начальный момент пуска) ω=0, следовательно Е=0. Тогда ток якоря, назовем его пусковым, определится:
| | |
Пусковой ток при этом будет чрезмерно большим, превышающим в десятки раз номинальное значение, что опасно для двигателя. С целью уменьшения пускового тока последовательно с обмоткой якоря включают пусковой реостат. Тогда выражение для пускового тока будет по формуле (1.11):
| | |
Где
Отсюда сопротивление пускового реостата определяется по формуле(1.12):
В зависимости от режима работы и условий пуска кратность пускового тока
Окончательно выражение для определения сопротивления пускового реостата будет:
Определение тока якоря, который был бы при непосредственном включении двигателя в сеть, его кратность по отношению к номинальному значению и сделать выводы для возможности практического применения данного способа пуска.
Как видно из результатов пусковой ток превосходит номинальный в 6 раз, что недопустимо. Отсюда можно сделать вывод, что метод непосредственного включения для этого двигателя не рентабелен.
1.2.7 Определение величины сопротивления динамического торможения
Определение величины сопротивления динамического торможения
Для получения режима динамического торможения обмотка якоря отключается от сети (т.е. U=0) и замыкается на сопротивление динамического торможения
Ток якоря в режиме динамического торможения определяется по формуле(1.12):
| | |
Где E-ЕДС двигателя, В
Выразим сопротивление динамического торможения из формулы 1.12 ,получим:
Найдем ЭДС двигателя по формуле(1.13):
| | |
Где
Подставим данные и вычисли ЭДС
Теперь можем вычислить сопротивление динамического торможения
1.2.8 Определение полных потерь мощности в двигателе при работе в номинальном режиме.
В номинальном режиме потери мощности двигателя постоянного тока с независимым возбуждением определяется по формуле(1.14):
| | |
Где
Подставим данные,получим
1.2.9 Изменение КПД двигателя.
Исследование, как изменяется КПД двигателя, работающего при номинальной нагрузке, на реостатной характеристике, при пониженном на 40% напряжении, ослабленном на 20% магнитном потоке в сравнении с номинальным значением КПД, указанным в паспорте двигателя.
Номинальная нагрузка определяется по формуле(1.15):
| | |
Где
Естественная характеристика:
Реостатная характеристика:
Пониженное напряжение:
Ослабленный магнитный поток:

Вывод: Из полученных при расчёте механических характеристик двигателя постояного видно, что изменяя магнитный поток, напржение подводимое к обмотке якоря или вводя сопротивления в цепь якоря, можно регулировать частоту вращения двигателя.