пример расчет транс. Расчёт характеристик трансформатора и электрических двигателей
 Скачать 0.86 Mb. Скачать 0.86 Mb.
|

3.Асинхронный двигатель.3.1 Теоритическая часть асинхронный двигателя.3.1.1 История создания и применение асинхронного двигателя.Система трехфазного переменного тока, позволившая создать устройства для получения вращающегося магнитного потока, вызвала появление наиболее распространенного в данное время электродвигателя, называемого асинхронным. Вклад в развитие асинхронных двигателей внес Галилео Феррарис, который в 1885 г. в Италии построил модель асинхронного двигателя мощностью 3 Вт. В 1888 г. Феррарис опубликовал свои исследования в статье для Королевской Академии Наук в Турине (в том же году, Тесла получил патент США 381,968 от 01.05.1888 (U.S. Patent 0 381 968|заявка на изобретение № 252132 от 12.10.1887), в которой изложил теоретические основы асинхронного двигателя. Заслуга Феррариса в том, что сделав ошибочный вывод о небольшом к.п.д. асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин. Статья Галилео Феррариса, опубликованная в журнале «Атти ди Турино», была перепечатана английским журналом и была прочитана в июле 1888 г. выпускником Дармштадтского Высшего технического училища, выходцем из России Михаилом Осиповичем Доливо-Добровольским. Доливо-Добровольский установил, что для создания вращающегося магнитного поля - основы работы асинхронного двигателя - технически и экономически целесообразно применение симметричной трехфазной магнитной системы, со сдвигом фаз на 120 электрических градусов. Трехфазный асинхронный электродвигатель, изготовленный Доливо-Добровольским в 1889 г., продемонстрировал высокую эффективность и неоспоримые преимущества перед двухфазными двигателями Феррариса и Тесла. По словам изобретателя: "уже при первом включении выявилось ошеломляющее для представлений того времени действие… попытка остановить его торможением за конец вала от руки блестяще провалилась, и только при особой ловкости было возможно воспрепятствовать таким способом его запуску при включении. Если принять во внимание малые размеры моторчика, это представлялось чудом для всех приглашенных свидетелей". Несмотря на это отношение к переменному току у многих оставалось сдержанным. Корифей электротехники Т. Эдисон отказался даже осмотреть новое изобретение, заявив: «Нет, нет, переменный ток - это вздор, не имеющий будущего. Я не только не хочу осматривать двигатель переменного тока, но и знать о нем». Вскоре Доливо-Добровольскому удалось решить все основные проблемы, связанные с конструкцией двигателя, устройство которого до настоящего времени принципиально не менялось. Первой демонстрацией практического применения асинхронного двигателя и трехфазной системы стала Международная электротехническая выставка 1891 г. во Франкфурте-на-Майне. Выставку с гидроэлектростанцией на реке Неккар в городе Лауфен соединила 170-километровая линия электропередачи. А 25 августа на выставке зажглась тысяча электроламп, питаемых током от Лауфенской электростанции. Затем был пущен трехфазный асинхронный двигатель мощностью 75 кВт, приводивший в действие декоративный дестиметровый водопад. Разработки Доливо-Добровольского вскоре были внедрены в производство. Простой, экономичный и надежный двигатель переменного тока, получил широкое распространение и послужил стимулом для развития техники переменных токов и электроэнергетики в целом. Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции. Основной областью применения АД вплоть до недавнего времени являлся нерегулируемый электропривод. В последние годы в связи с разработкой и выпуском электротехнической промышленностью тиристорных преобразователей частоты и напряжения стали создаваться регулируемые асинхронные ЭП с характеристиками, не уступающими по своим показателям ЭП постоянного тока.[7] Достоинства АД: Возможность прямого подключения к питающей сети без пускорегулирующих приборов при коэффициенте загрузки ≈1. Самостоятельный запуск группы асинхронных двигателей одной или нескольких питающих секций при кратковременном обесточивании и последующем возобновлении питания под воздействием станционной автоматики. Простота обслуживания и эксплуатации, доступная цена, высокая надежность, определяющая широкое применение в промышленности с целью привода механизмов, устойчивых к перепадам электроэнергии, пусковых показателей, скольжения. Безотказная работа на участках, размещенных на высоте над уровнем моря 1 км, при диапазоне температур – 40°С и +40 °С, влажности воздуха при +25°С не более 98%, запыленности — 10 мг/м3. Способность принимать различные механические перегрузки без существенных изменений КПД или нарушения стабильности работы. Полная автоматизация работы. Отсутствие необходимости проводить сложное и дорогостоящее обслуживание. Асинхронным двигателем проводят комплектацию редукторов (червячных и цилиндрических). Механизм способствует уменьшению угловых скоростей вала и повышению крутящих моментов. Широкий выбор конструкций. В зависимости от типа обмотки, различают асинхронные электродвигатели с короткозамкнутым и фазным ротором (с контактными кольцами) Недостатки АД: Чувствительностью к перепадам напряжения. Высокими пусковыми токами при низких коэффициентах скольжений. Необходимостью использования преобразователей частоты, пусковых реостатов для улучшения характеристик электромотора. Небольшими показателями синхронной частоты вращения — не превышает 3000 об/мин. Для увеличения скорости потребуется редуктор или турбопривод. Сложной регулировкой производительности механизмов, вращающихся под воздействием асинхронного электродвигателя. 3.1.2 Устройство и принцип работы АД.Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В конструкцию АД входят следующие элементы: Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу. Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой». Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов - обеспечивающие вращение, охлаждение и защиту механизма. Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора. В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя. Пошагово процесс выглядит следующим образом: При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу. В накоротко замкнутом роторе возникает переменный ток Два магнитных поля (статора и ротора) создают крутящий момент. Крутящийся ротор пытается «догнать» поле статора. В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю. Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает. То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность. Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону. Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки». На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя. [8] На рисунке 3.1.1 показана конструкция AД с коротко замкнутым ротором. 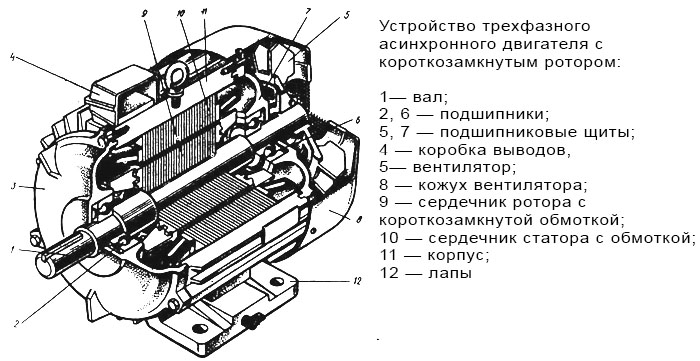 Рисунок 3.1.1 Конструкция АД. 3.1.3 Пуск АД.Процесс пуска для электродвигателя любого типа является наиболее тяжелым режимом работы. Ударные значения тока и момента в пусковом режиме АД могут достигать в отдельных случаях 10-кратных по отношению к номинальным величинам. В среднем кратность пусковых токов и моментов составляет 5-7 значений номинальных величин. Высокая кратность указанных величин обусловлена в первую очередь особенностями протекания электромагнитных переходных процессов в асинхронном электродвигателе при пуске. При частых пусках рабочий ресурс электродвигателей значительно сокращается. Для мощных электродвигателей переменного тока количество пусков без пусковых устройств лимитировано, т. е. через определенное число пусков осуществляется капитальный ремонт с заменой изоляции обмоток. Ограничение пускового тока возможно: 1.За счет понижения напряжения 2.За счет повышения сопротивлений в статорной и роторной цепях Основные способы пуска АД: 1.Пуск непосредственным включением в сеть (прямым включением в сеть) 2.Пуск при пониженном напряжении (переключение со схемы соединения обмотки статора «треугольник» на схему «звезда», применением тиристорных преобразователей напряжения) 3.Пуск при ограничении пускового тока (включением токоограничивающих сопротивлений, реакторов и автотрансформаторов) 4.Реостатный пуск АД с фазным ротором 5.Частотный пуск 6.Пуск с применением специальных схем включения АД Прямой пуск. Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора максимальны. По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока 5-7,причем большее значение относится к двигателям большей мощности. Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт). Способ пуска асинхронного двигателя переключением со звезды на треугольник, применяется в установках, где нагрузка на валу минимальна или вообще отсутствует. Для того чтобы осуществить данный вид пуска, нужно чтобы основной схемой включения двигателя был треугольник. В начальный момент времени обмотка соединяется по схеме звезда, запускается, происходит разгон до некоторого значения, а затем переключают на треугольник. Таким образом, добиваются уменьшения токов в момент пуска. Но, с уменьшением токов, уменьшаются и моменты, именно поэтому не рекомендуется использовать этот способ для двигателя с нагрузкой на валу. Схема подключения показана на рисунке 3.1.2. При этом напряжение АД уменьшается в раз, а пусковой ток и пусковой момент понижаются в 3 раза.  Рисунок 3.1.2 Пуск АД при переключении обмоток статора со схемы «треугольник» на схему «звезда» (на время пуска). Для улучшения пусковых характеристик АД выполняют реостатное регулирование с фазным ротором. Пуск АД с фазным ротором производят вручную или автоматически. Ручной пуск осуществляют с помощью пускового реостата. При заданном моменте переходном переход с одной характеристики на другую происходит в момент исключения соответствующей ступени реостата (его сопротивление уменьшается). При пуске АД сопротивление пускового реостата Rд2 выбирается так, чтобы пусковой ток не превышал допустимого значения и чтобы пусковой момент АД был равен максимальному. Затем выводится первая ступень пускового реостата и его сопротивление уменьшается до величины Rд1. При этом двигатель переходит на следующую характеристику и т.д. до полного вывода пускового реостата Rд=0. Введение реостата в цепь ротора позволяет: 1) уменьшить пусковой ток двигателя; 2) увеличить пусковой момент двигателя. Когда двигатель разгонится до скорости 30-40% номинальной, отключают первую ступень. Двигатель с броском тока продолжает разгоняться, и при скорости 60-70% номинальной отключают вторую ступень. Двигатель после отключения резисторов R и R продолжает разгоняться до номинальной скорости. Улучшение пусковых характеристик за счет увеличения активного сопротивления ротора используется в короткозамкнутых асинхронных двигателях со специальными обмотками на роторе. Наибольшее применение нашли двигатели с глубокими пазами на роторе и двигатели с двойной клеткой на роторе. Двигатели с глубокими пазами на роторе. У таких двигателей высота паза ротора в несколько раз больше его ширины. В пазах располагается узкий высокий проводник. Идея улучшения пусковых характеристик в таком двигателе основана на том, что при скольжениях, близких к единице, когда частота тока в роторе примерно равна частоте сети, в этих проводниках будет наблюдаться эффект вытеснения тока, в результате которого активное сопротивление проводника возрастает, а индуктивное уменьшается. Вытеснение тока в проводниках происходит в результате действия потока пазового рассеяния Фσп. Поэтому большая часть тока пройдет по верхним элементам. По мере разгона двигателя частота тока в роторе уменьшается. Явление вытеснения тока при этом ослабевает и распределение тока по высоте проводника выравнивается. По окончании пуска ток в проводнике распределяется практически равномерно, а активное сопротивление обмотки ротора уменьшается по сравнению с его значением при s=1. У двигателей с глубоким пазом увеличивается кратность начального пускового момента и уменьшается кратность начального пускового тока. На рисунке 3.1.3 показаны разновидности пазов, применяемых для двухклеточных роторов двигателей. 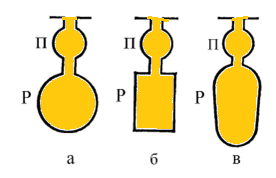 Рисунок 3.1.3 Разновидность пазов. В верхнюю часть паза, расположенную ближе к зазору и имеющую меньшее поперечное сечение, закладываются проводники одной клетки П, а в нижнюю – другой Р. Кроме того, проводники верхней клетки выполняют из материала с большим удельным сопротивлением (латунь, бронза), чем проводники нижней (медь). Поэтому верхняя клетка имеет большее активное сопротивление, чем нижняя. Каждая клетка по торцам имеет свои короткозамыкающие кольца. В первый момент пуска, когда частота тока в роторе f2≈f1, полное сопротивление нижней клетки из-за ее большого индуктивного сопротивления будет значительно выше полного сопротивления верхней клетки. Вследствие этого при одинаковых ЭДС, индуцируемых основным вращающимся полем в проводниках паза ротора, в верхней клетке ток будет больше, чем в нижней. Так как эта клетка имеет большое активное сопротивление, то вращающий момент, создаваемый этим током при пуске, также будет большим. Двигатели с двойной клеткой применяются в установках с тяжелыми условиями пуска. Однако, как и у двигателя с глубоким пазом, в этом двигателе улучшение пусковых характеристик влечет за собой некоторое ухудшение рабочих характеристик.[9] 3.1.4 Регулирование скорости АД.Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов. 1)Реостатное регулирование. Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление(рисунок 3.1.4 а). С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики. Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения. Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения. 2)Регулирование изменение напряжения. При регулировании частоты вращения асинхронного двигателя(рисунок 3.1.4 б) изменением напряжения, подводимого к обмотке статора, критический момент Если момент сопротивления рабочей машины больше пускового момента электродвигателя ( Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до Так же для изменения напряжения применяют трехфазные автотрансформаторы. Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя. Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя. [10] 3)Регулирование изменением частоты питающего напряжения. Принцип частотного метода регулирования скорости АД(рисунок 3,1,4 в) заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6. С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения. Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения. Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя. В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты 4)Регулирование изменением числа пар полюсов. Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер. Существует два способа изменения числа пар полюсов(рисунок 3.1.5). В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза. Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором.[12] 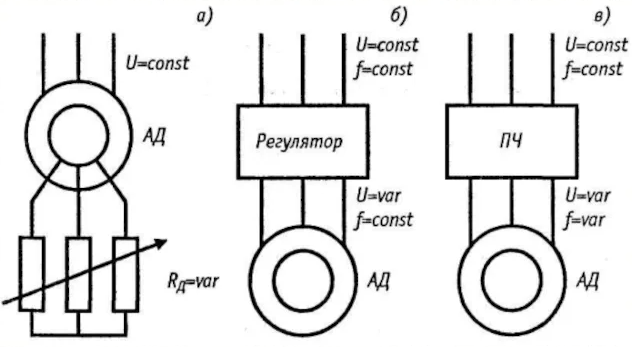 Рисунок 3.1.4 Способы регулирования скорости вращения 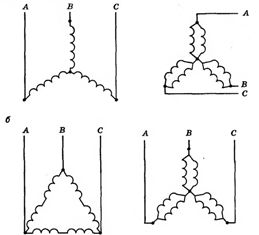 Рисунок 3.1.5 Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную; б - с треугольника на двойную звезду. |