курсовой проект. Расчет характеристик трансформаторов и электрических двигателей з
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

3 Асинхронный двигатель3.1 Теоретическая часть3.1.1 Общие сведенияАсинхронная машина – это бесколлекторная машина переменного тока, у которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля. Асинхронные двигатели являются самыми распространенными из всех двигателей. Их преимущества состоят в простоте устройства, большой надежности и сравнительно низкой стоимости. Широко применяются трехфазные асинхронные двигатели, предложенные М.О. Доливо-Добровольским в 1888 г. Они выполняются мощностью от долей ватта до тысяч киловатт, с частотой вращения от 500 до 3000 об/мин и напряжением до 10 кВ. Однофазные асинхронные двигатели используют для привода бытовых приборов, электроинструмента, в схемах автоматики. Они питаются от однофазной цепи и имеют мощность, как правило, не выше 0,5 кВт. Асинхронные машины могут работать в режиме генератора. Но как источники электрической энергии они почти не применяются, так как не имеют собственного источника возбуждения магнитного потока и по своим показателям уступают синхронным генераторам. Асинхронные машины применяют в качестве регуляторов напряжения, фазорегуляторов, преобразователей частоты и др. 3.1.2 Устройство и принцип действияАсинхронный двигатель потребляет электрическую энергию от трехфазного источника и преобразует ее в механическую энергию, вращая приводной механизм. Устройство асинхронного двигателя схематично изображено на рисунке 3.1.  Рисунок 3.1 – Конструкция асинхронного двигателя Статор состоит из станины, представляющий собой стальной полый цилиндр, являющейся механическим остовом машины. Внутри станины крепится стальной цилиндрический сердечник магнитопровода статора. На внутренней поверхности сердечника статора имеются продольные пазы. В пазах статора уложены проводники обмотки статора. Обмотка статора трехфазная, т.е. состоит из трех одинаковых частей (фаз). Каждая фаза состоит из нескольких катушек, содержащих определенное количество витков медного провода и определенным образом соединенных между собой. Фазы обмотки статора размещены в пазах сердечника статора таким образом, что смещены друг относительно друга по окружности на 120°. Шесть электрических выводов трех фаз обмотки статора подведены к клеммной коробке, расположенной на корпусе двигателя. Три фазы обмотки могут быть соединены между собой способом «звезда» либо «треугольник». Ротор асинхронного двигателя (вращающаяся часть) представляет из себя стальной цилиндрический сердечник, являющийся частью магнитопровода. Ротор отделен от статора небольшим воздушным зазором. Наличие воздушного зазора обусловлено необходимостью свободного вращения ротора внутри статора. Магнитопровод ротора и магнитопровод статора образуют магнитную цепь асинхронного двигателя. Однако, как известно, воздушный зазор в магнитопроводе ухудшает свойства магнитной цепи, увеличивая ее магнитное сопротивление. Поэтому его величина должна быть как можно меньше. Практически величина воздушного зазора может быть от 0,2 мм до 1,5 мм в зависимости от мощности и габаритов двигателя. Магнитопроводы статора и ротора шихтованные из листов электротехнической стали. На наружной поверхности сердечника ротора имеются продольные пазы. В этих пазах размещена обмотка ротора асинхронного двигателя. Обмотка ротора может быть двух типов: «фазная обмотка» либо «короткозамкнутая обмотка». При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся. Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение. Скольжение s – это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр – критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме – 1–8 %. Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей. 3.1.3 Рабочие характеристикиРабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cosφ, и тока статора I1 от полезной мощности Р2 при U1=const, f1=const. Рабочие характеристики представлены на рисунке 3.2. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1-s). Скольжение s =Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2=0, а поэтому s≈0 и n20≈n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость n2=f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе. 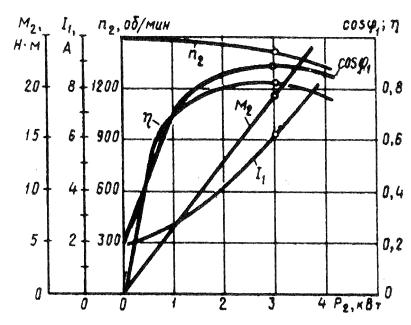 Рисунок 3.2 - Рабочие характеристики асинхронного двигателя Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 =Р2/ω2= 60P2/(2πn2)=9,55Р2/n2. Из этого выражения следует, что если n2=const, то график М2=f(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2=f(P2) имеет криволинейный вид. Зависимость cosφ1= f(P2). В связи с тем, что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1≈I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1≈φ0), лишь немногим меньше 90°. Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,8-0,9) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cosφ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. 3.1.4 Регулирование скорости вращенияНаиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов. Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n0(1-s). Из рисунка 3.3 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается. 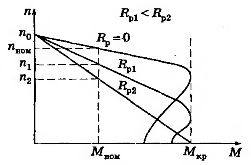 Рисунок 3.3 – Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2-3):1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором. Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения. При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет, а скольжение от Uрег не зависит. Механические характеристики при данном способе регулировании представлены на рисунке 3.4. 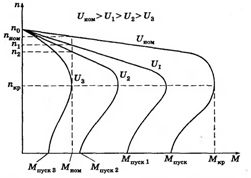 Рисунок 3.4 - Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс>Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу. Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр. Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения. Замкнутая схема управления асинхронным двигателем, выполненным по схеме тиристорный регулятор напряжения - электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках). Так как частота вращения магнитного поля статора n0=60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n0 магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте. Механические характеристики при частотном регулировании представлены на рисунке 3.5. 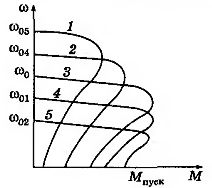 Рисунок 3.5 - Механические характеристики асинхронного двигателя при частотном регулировании С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения. Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20-30):1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения. 3.1.4 Преимущества и недостаткиПо сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым. Еще одним плюсом является подключение асинхронного двигателя. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет. Одним из недостатков является скорость вращения двигателя. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора. Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток. Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты. Скольжение является существенным недостатком. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу. При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения. При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой. Еще одной проблемой является пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую. Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором. И последний недостаток – это пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени. При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения. Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска. |