курсовой проект. Расчет характеристик трансформаторов и электрических двигателей з
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

1 Двигатель постоянного тока1.1 Теоретический материал1.1.1 История развитияВеличайшим техническим достижением конца XIX века стало изобретение промышленного электродвигателя. Этот компактный, экономичный, удобный мотор вскоре сделался одним из важнейших элементов производства, вытеснив другие виды двигателей отовсюду, куда только можно было доставить электрический ток. Электрические двигатели появились еще во второй четверти XIX столетия, но прошло несколько десятилетий, прежде чем создались благоприятные условия для их повсеместного внедрения в производство. Один из первых совершенных электродвигателей, работавших от батареи постоянного тока, создал в 1834 году русский электротехник Якоби. Этот двигатель имел две группы П-образных электромагнитов, из которых одна группа располагалась на неподвижной раме. Их полюсные наконечники были устроены асимметрично - удлинены в одну сторону. Вал двигателя представлял собой два параллельных латунных диска, соединенных четырьмя электромагнитами, поставленными на равном расстоянии один от другого. При вращении вала подвижные электромагниты проходили против полюсов неподвижных. У последних полярности шли попеременно: то положительная, то отрицательная. К электромагнитам вращающегося диска отходили проводники, укрепленные на валу машины. На вал двигателя был насажен коммутатор, который менял направление тока в движущихся электромагнитах в течение каждой четверти оборота вала. Обмотки всех электромагнитов неподвижной рамы были соединены последовательно и обтекались током батареи в одном направлении. Обмотки электромагнитов вращающегося диска были также соединены последовательно, но направление тока в них изменялось восемь раз за один оборот вала. Следовательно, полярность этих электромагнитов также менялась восемь раз за один оборот вала, и эти электромагниты поочередно притягивались и отталкивались электромагнитами неподвижной рамы. Двигатель Якоби для своего времени был самым совершенным электротехническим устройством. В том же 1834 году подробное сообщение о принципах его работы было представлено Парижской Академии наук. В 1838 году Якоби усовершенствовал свой электромотор и, установив его на гребном боте, с десятью спутниками совершил небольшое плавание по Неве со скоростью 4,5 км/ч. Источником тока ему служила мощная батарея гальванических элементов. 1837 году американский техник Томас Дэвенпорт также построил электродвигатель с непосредственным вращением якоря. В этом двигателе взаимодействовали подвижные электромагниты с неподвижными постоянными магнитами. Благодаря расположению в одной плоскости подвижных и неподвижных частей, электродвигатель Дэвенпорта был более компактным. Рассматриваемые электродвигатели действовали по прицепу взаимного притяжения и отталкивания магнитов или электромагнитов. Вращающий момент на валу был непостоянным, и, в связи с попеременным притяжением и отталкиванием стержневых якорей, действие таких электродвигателей в системе электропривода представлялось малоперспективным. До тех пор, пока не был изобретен и внедрен в производство совершенный электрический генератор, электродвигатели не могли найти широкого применения, так как питать их от батареи было слишком дорого и невыгодно. Кроме того, в силу разных причин двигатели постоянного тока получили лишь ограниченное применение. Гораздо более важную роль играют в производстве электромоторы, работающие на переменном токе. 1.1.2 Преимущества и недостаткиКаждый двигатель в связи с конструктивными особенностями имеет свои достоинства и недостатки. К достоинствам ДПТ относятся: Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление; Легко регулируемая частота вращения; Хорошие пусковые характеристики; Компактные размеры (особенно сильно выражено у двигателей на постоянных магнитах); Возможность использования одного и того же механизма как в режиме двигателя, так и генератора; КПД при полной нагрузке, как правило, выше на 1–2 % чем у асинхронных и синхронных машин, а при неполной нагрузке преимущество может возрастать до 15 %. У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик. К недостаткам относятся: Ограниченный ресурс коллектора и щеток; Дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щеточных узлов; Ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямление тока; Дороговизна в изготовлении якоря. Основным недостатком является дороговизна изготовления, поэтому машины переменного тока более распространены. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы. Также стоит отметить, что в современных моделях ДПТ необходимость регулярного обслуживания коллекторно-щеточного узла и определенное ограничение срока эксплуатации практически полностью нивелированы. 1.1.3 Конструкция и принцип работыОсновными частями машины постоянного тока являются статор и ротор. Статор – неподвижная часть машины, ротор – вращающаяся. Статор состоит из станины, представляющий собой стальной полый цилиндр, являющейся механическим остовом машины и одновременно служащей частью магнитопровода. К внутренней поверхности станины крепятся главные полюсы с обмоткой возбуждения. Катушки обмотки возбуждения, расположенные на главных полюсах, включаются так, чтобы северные и южные полюсы чередовались. Между главными полюсами могут располагаться дополнительные полюсы, служащие для улучшения характеристик машины. Обмотка дополнительных полюсов включается в цепь ротора (якоря) машины постоянного тока. Ротор машины постоянного тока называется якорем. Якорь представляет из себя цилиндр, набранный из листов электротехнической стали. На наружной поверхности якоря имеются продольные пазы с уложенной в них обмоткой якоря. Якорь помещается внутри статора и отделен от него небольшим воздушным зазором. Станина, полюсы и сердечник якоря образуют магнитную цепь, по которой замыкается магнитный поток машины. Для соединения обмотки вращающегося якоря с внешней электрической цепью и коммутации тока якоря служит щеточно-коллекторный узел. Цилиндрический коллектор состоит из отдельных медных коллекторных пластин, изолированных друг от друга. Каждая пластина коллектора соединена с соответствующей секцией обмотки якоря. Коллектор крепится на валу машины и вращается вместе с якорем. К наружной поверхности коллектора прижимаются неподвижные электрические щетки, установленные в щеткодержателях. Во время работы машины коллектор скользит по щеткам, обеспечивая скользящий электрический контакт. Конструкция ДПТ представлена на рисунке 1.1. 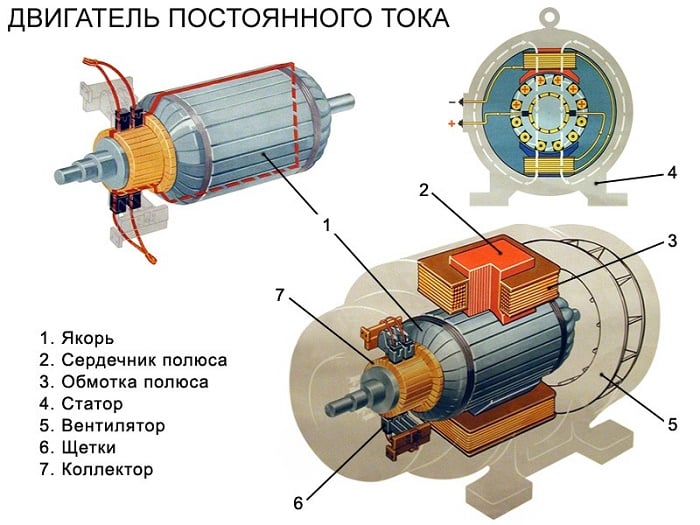 Рисунок 1.1 – Конструкция двигателя постоянного тока Принцип действия ДПТ основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение. Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди. Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель. Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением. Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора, стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток. 1.1.4 Механические характеристикиОсновной характеристикой двигателей является механическая характеристика. Она представляет из себя зависимость частоты вращения двигателя от развиваемой им момента n=f(M). Двигатели параллельного и независимого возбуждения с постоянным магнитным потоком имеют «жесткую» естественную механическую характеристику: скорость их вращения почти не зависит от момента нагрузки на валу. Поэтому они применяются для привода металлорежущих станков, экскаваторов и буровых станков. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной. Для построения механической характеристики двигателя параллельного возбуждения достаточно иметь две ее точки, так как характеристика имеет вид прямой линии (прямолинейна). Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать тремя способами: якорным – изменением напряжения на обмотке якоря Uя; полюсным – изменением магнитного потока возбуждения Фв; реостатным – изменением добавочного сопротивления Rд в цепи якоря. Реостатное регулирование скорости электроприводов осуществляется путем изменения активных сопротивлений резисторов, включенных в главные цепи двигателей. При этом для двигателей постоянного тока имеются в виду резисторы, включаемые в цепи обмоток якоря. При регулировании скорости сопротивлением в цепи якоря во всем диапазоне имеем Mэ=const. Включение добавочного сопротивления в цепь якоря позволяет изменять скорость вниз от скорости идеального холостого хода, при этом жесткость механических характеристик резко уменьшается, особенно при больших значениях добавочного сопротивления. Механические характеристики при реостатном регулировании представлены на рисунке 1.2. 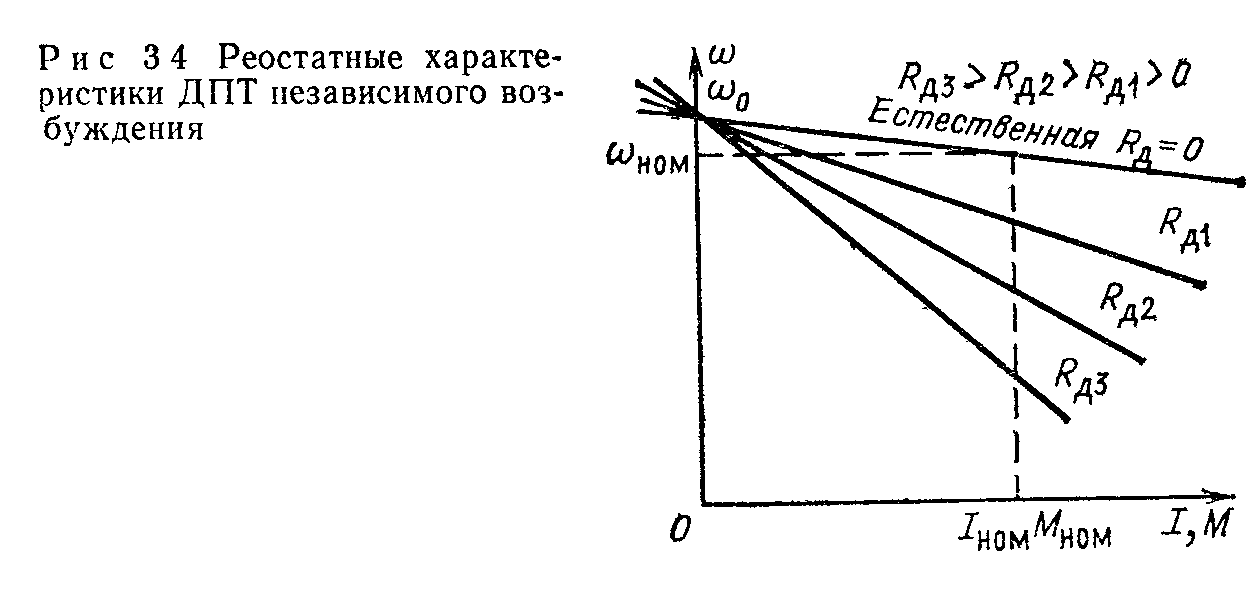 Рисунок 1.1 – Механические характеристикидвигателя при реостатном регулировании Диапазон реостатного параметрического регулирования тока и момента ограничен сверху перегрузочной способностью двигателя по условиям коммутации, а пределы изменения скорости, в которых можно получить заданную точность регулирования, уменьшаются с ростом статической жесткости. Потери мощности при реостатном регулировании пропорциональны потребляемой мощности и перепаду угловой скорости, выраженному в относительных единицах. Так, если момент нагрузки постоянен (следовательно, постоянна потребляемая мощность) и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. данный способ регулирования (реостатный) является не экономичным. Реостатное регулирование скорости осуществляется простыми и дешевыми техническими средствами и обычно находит применение в тех случаях, когда требования к плавности регулирования невелики, продолжительность работы с пониженной скоростью незначительна и применение более совершенных методов регулирования экономически нецелесообразно (вентиляторы, дымососы). Для реализации регулирования ДПТ изменением питающего напряжения необходимо иметь источник питания, напряжение на зажимах которого может изменяться в широких пределах. Для электродвигателей постоянного тока в качестве таких источников используются различного рода управляемые преобразователи электрической энергии переменного тока в электрическую энергию постоянного тока. Наиболее широкое применение получили электромашинные и вентильные преобразователи. Регулирование напряжением, так же, как и реостатное, осуществляется при постоянном потоке двигателя Ф=Фн=const. С изменением напряжения осуществляется регулирование только скорости идеального холостого хода, тогда как жесткость механических характеристик при неизменных параметрах цепи якоря сохраняется. При этом механические характеристики представляют собой семейство параллельных друг другу прямых, т. е. имеют одинаковую жесткость (как показано на рис. 1.3), что определяет относительно высокую стабильность угловой скорости.  Рисунок 1.3 – Механические характеристики двигателя при изменении питающего напряжения Модуль жесткости механических искусственных характеристик меньше, чем модуль жесткости естественной характеристики. Однако по сравнению с реостатным регулированием при регулировании в зоне низких скоростей модуль жесткости характеристик оказывается значительно большим, что дает возможность существенно расширить диапазон регулирования скорости. Регулирование угловой скорости осуществляется вниз от основной, так как напряжение, прикладываемое к якорю, в большинстве случаев может изменяться только вниз от номинального (иногда, например, при регулировании угловой скорости двигателя с постоянными магнитами возможно регулирование как вниз, так и вверх от основной скорости — двухзонное). Оценив технические и экономические показатели параметрического регулирования скорости изменением напряжения, можно прийти к выводу, что высокие технические показатели регулирования скорости покупаются ценой значительного увеличения габаритов и стоимости электропривода. Дополнительные затраты, связанные с введением управляемого преобразователя, полностью окупаются высокой управляемостью системы, обеспечивающей возможность эффективного автоматического управления всеми режимами работы электропривода и точного автоматического регулирования его координат. Принцип регулирования изменением магнитного потока возбуждения следует непосредственно из анализа выражений для скоростной и механической характеристики. Ток возбуждения, а значит, и поток могут изменяться лишь в сторону уменьшения по сравнению с номинальными, так как по условиям нормальной работы обмотки возбуждения ток в ней не может длительно превосходить номинальную величину. Кроме того, даже кратковременное увеличение Iв оказывается неэффективным, так как в большинстве случаев магнитные цепи электрических машин уже при номинальном потоке близки и насыщению. Следовательно, речь идет лишь о регулировании скорости путем снижения потока или, как принято говорить, путем ослабления потока возбуждения. Основным достоинством рассматриваемого метода регулирования является то, что мощность обмотки возбуждения невелика и составляет, как правило, 2-5% мощности двигателя. Для машин малой, а иногда и средней мощности обычно используются резисторы в цепи возбуждения, а для крупных машин — специальные преобразователи, например генераторы, электромашинные усилители, магнитные усилители, регуляторы напряжения, вентильные преобразователи. Для того, чтобы при разных потоках ЭДС была равна одному и тому же номинальному напряжению сети, частота вращения должна увеличиваться обратно пропорционально ослаблению потока. Например, если поток ослаблен вдвое, то частота вращения должна увеличиться также вдвое и т. д. Механические характеристики представлены на рисунке 1.4. 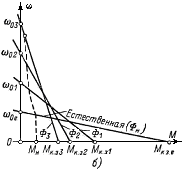 Рисунок 1.4 - Механические характеристики двигателя постоянного тока параллельного возбуждения при регулировании угловой скорости током возбуждения Диапазон регулирования ограничивается различными факторами. Главным из них является ухудшение условий коммутации с возрастанием угловой скорости, поскольку реактивная ЭДС, вызывающая искрение на коллекторе пропорциональна току и угловой скорости. Кроме того, при больших угловых скоростях требуется повышать механическую прочность якоря. Нижний предел угловой скорости ограничивается степенью насыщения машины и нагревом обмотки возбуждения, т. е. номинальной угловой скоростью. Большинство двигателей независимого возбуждения, не предназначенных для регулирования скорости, и допускают повышение ее только на 10-20%. Двигатели, специально сконструированные для работы с регулированием скорости, дают возможность работать со скоростью, в 3-5 раз превышающей скорость идеального холостого хода при номинальном значении магнитного потока. Оценивая энергетические показатели данного способа регулирования скорости двигателей постоянного тока с параллельным возбуждением, необходимо отметить, что потери в силовой цепи двигателя и его кпд такие же, как и при работе на естественной характеристике. Следует также учитывать, что в связи с относительно малой мощностью цепи обмотки возбуждения по сравнению с номинальной мощностью двигателя затраты на регулировочные устройства (реостаты или преобразователи в цепи обмотки возбуждения) невелики. Двигатели независимого возбуждения, регулируемые путем ослабления потока, широко применяются для привода механизмов, мощность которых с изменением скорости остается постоянной. 1.1.5 Пуск и торможениеКратковременный скачок напряжения, возникающий при запуске двигателя, называется пусковым током. Его значение обычно в 5-10 раз больше номинального тока. Увеличение токовой нагрузки в статоре происходит с одновременным увеличением крутящего момента механизма, который передается на вал ротора. Следствием резкого увеличения крутящего момента являются: повышение температуры обмотки статора; разрушение изоляции; вибрации; механические деформации; поломка двигателя. Во избежание этих проблем пусковой ток необходимо понизить до номинальных частот вращения немедленно после начала работы агрегата. Пуск электродвигателя постоянного тока может осуществляться несколькими способами: прямой пуск; реостатный пуск; пуск путем изменения питающего напряжения. Все они призваны снижать пусковой ток и стабилизировать напряжение питания. При прямом пуске обмотка якоря подключается непосредственно к сети. Обычно в электродвигателях постоянного тока падение напряжения во внутреннем сопротивлении цепи обмотки якоря при номинальном токе составляет 5—10% от Uном, поэтому при прямом пуске ток Iя превышает номинальный ток Iном в 10÷20 раз, что недопустимо для машины. По этой причине прямой пуск применяют только для двигателей очень малой мощности (до нескольких сотен ватт), в которых сопротивление Rя относительно велико, и лишь в отдельных случаях — для двигателей мощностью в несколько киловатт. При прямом пуске таких двигателей пусковой ток превышает номинал в 4÷6 раз. Наибольшее применение получил реостатный пуск, при котором для ограничения тока в цепь якоря включают пусковой реостат Rп. Он обычно имеет несколько ступеней (секций) R1, R2, R3, которые в процессе пуска замыкают накоротко специальными выключателями (контакторами) 1, 2 и 3. При этом сопротивление реостата постепенно уменьшается, что обеспечивает высокое значение пускового момента в течение всего времени разгона двигателя. Принципиальная схема реостатного пуска ДПТ представлена на рисунке 1.5.  Рисунок 1.5 – Принципиальная схема реостатного пуска двигателя Сопротивление Rп подбирают так, чтобы для машин большой и средней мощности Iп= (1,5-1,8)Iном, а для машин малой мощности Iп= (2-2,5) Iном. Реостатный пуск электродвигателей с независимым и параллельным возбуждением осуществляется так же, как и в двигателях с последовательным возбуждением, путем постепенного выключения отдельных ступеней пускового реостата. При работе электродвигателя по естественной характеристике развиваемый им электромагнитный момент М и частота вращения п изменяются автоматически в соответствии с изменением нагрузочного момента на валу Мвн. В процессе же пуска при работе на реостатных характеристиках электромагнитный момент двигателя можно регулировать независимо от значения Мвн. Момент М должен быть больше Мвн, чтобы обеспечить разгон двигателя и подвижного состава с заданным ускорением. Развиваемый двигателем при пуске электромагнитный момент зависит от сопротивления пускового реостата и от скорости его изменения, т. е. скорости выключения отдельных его ступеней. Реостатный пуск применяют на электровозах и электропоездах постоянного тока. При реостатном пуске возникают довольно большие потери энергии в пусковом реостате. Этот недостаток можно устранить, если пускать двигатель путем плавного повышения напряжения, подаваемого на обмотку якоря. Такой пуск называют безреостатным. Для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Безреостатный пуск применяют на э. п. с. переменного тока и тепловозах. Кроме двигательных режимов электродвигатели также могут работать в тормозных режимах. Тормозной режим характеризуется тем, что скорость вращения и момент двигателя имеют разные знаки. Быстрота и точность, с какой будут протекать переходные процессы остановки или реверса во многом определяют производительность механизма, а иногда и качество вырабатываемого продукта. Возможны три варианта электрического торможения: рекуперативное торможение; динамическое торможение; торможение противовключением. Каждый тормозной режим является генераторным, так как энергия поступает в машину с вала, преобразуется в электрическую и либо отдаётся в сеть, либо затрачивается на нагрев элементов якорной цепи, обладающих активным сопротивлением, и рассеивается в окружающую среду. Режим рекуперативного торможения возникает, когда скорость двигателя больше скорости идеального холостого хода двигателя, то есть выполняется условие ω>ω0. При этом ЭДС двигателя становится больше напряжения сети, и ток двигателя меняет направление. При этом двигатель работает генератором и отдает энергию в сеть. Электромагнитный момент двигателя при этом противодействует внешнему вращающему моменту. Данный вид торможения является наиболее экономичным, так как энергия возвращается в сеть. Применение этого способа является эффективным энергосберегающим средством. Этот режим целесообразен, когда привод работает с частыми пусками и остановками. Например, электротранспорт. При движении под уклон также возникают благоприятные условия для возникновения этого режима торможения. Необходимость в динамическом торможении возникает, когда после отключения двигателя от сети его якорь продолжает вращаться под действием запаса кинетической энергии. Если по технологии требуется более быстрый останов двигателя, чем время остановки на выбеге, используется динамическое торможение. При данном способе торможения якорь двигателя замыкается на тормозное сопротивление, а обмотка возбуждения остаётся подключенной в сеть для создания тормозного момента. Вырабатываемая при этом энергия переходит в тепловую и рассеивается в окружающее пространство. В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС, т.е. станет отрицательным. В результате электромагнитный момент также изменит направление и станет тормозящим. Процесс торможения продолжается до полной остановки якоря (n = 0). Допустим, что двигатель работает в основном (двигательном) режиме с номинальной нагрузкой. При отключении двигатели от сети вращающий момент М = 0, но якорь двигателя за счет кинетической энергии вращающихся масс электропривода некоторое время будет продолжать вращение, т.е. произойдет выбег двигателя. Чтобы уменьшить время выбега двигателя, применяют торможение противовключением. С этой целью изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (-U). Но якорь двигателя под действием кинетической энергии вращающихся масс электропривода сохраняет прежнее (положительное) направление вращения, и так как направление магнитного потока не изменилось, то ЭДС якоря также не меняет своего направления и действует согласно напряжению (-U), при этом ток якоря создается суммой напряжения сети U и ЭДС якоря. В этих условиях электромагнитный момент станет отрицательным. Под действием тормозящего момента — Mт, частота вращения якоря уменьшается, достигнув нулевого значения. Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя и его якорь под действием момента, который прежде был тормозным, начнет вращение в противоположную сторону. При этом двигатель перейдет в двигательный (основной) режим с отрицательными значениями частоты вращения и вращающего момента. Во избежание нежелательного реверсирования операцию торможения противовключением автоматизируют, чтобы при нулевом значении частоты вращения цепь якоря отключалась от сети. |