Расчет сцепления автомобиля
 Скачать 0.61 Mb. Скачать 0.61 Mb.
|

Привод управления сцеплениемОсновная задача привода управления сцепления состоит в выборе таких кинематических параметров, которые удовлетворяли бы допустимым нагрузкам на педаль управления и данному ходу педали, работе совершаемой при выключении сцепления. 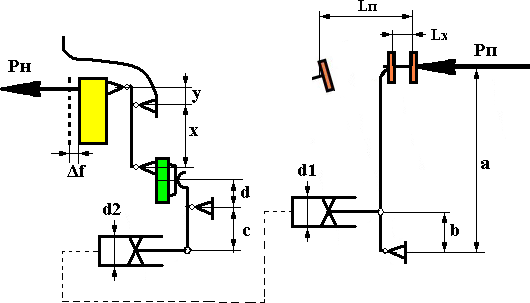 Привод управления сцепления бывает механическим и гидравлическим. Расчеты этих приводов аналогичны т.к в гидравлическом приводе используются диаметры исполнительного и рабочего цилиндров, а они равны друг другу и при определении передаточного числа они сокращаются. Привод управления сцепления бывает механическим и гидравлическим. Расчеты этих приводов аналогичны т.к в гидравлическом приводе используются диаметры исполнительного и рабочего цилиндров, а они равны друг другу и при определении передаточного числа они сокращаются.Схема гидравлического привода управления сцеплением В пояснительной записке необходимо обосновать выбор одной из схем привода управления сцеплением. Механический привод устанавливается преимущественно на легковых автомобилях, оснащенных силовыми агрегатами малой мощности. Данный вид привода отличается предельно простым устройством и дешев при производстве. Кроме того, механический привод весьма прост в обслуживании и ремонте, т.к содержит минимальное количество конструктивных элементов. Гидравлический привод имеет более сложное устройство в сравнении с механическим. В его устройстве также присутствуют педаль и вилка сцепления, однако гибкий трос заменен следующими элементами: Главный цилиндр Бачек для жидкости Рабочий цилиндр Гидравлическая магистраль Несмотря на большое количество конструктивных элементов и более сложное устройство, гидравлический привод более совершенен, нежеле механический. Главной особенностью гидравлического привода является отсутствие троса, который является механическим элементом, подверженный износу и поломкам. Также из за относительно высокой мощности автомобиля ЗИЛ предпочтение отдается гидравлическому сцеплению. Принимаем размеры f и e равными 20мм и 70мм соответственно. Вычислим передаточное отношение рычагов выключения сцепления: 𝑈2 = 𝑒/ƒ (42) 𝑈2 = 70 = 3.5  20 20Вычислим передаточное отношение педального привода т.е предварительно приняв общее передаточное число равным 50. 𝑈1 = 𝑈пc/𝑈2 (43) 𝑈1 = 50  3,5 3,5= 14,29 Исходя из условий обеспечения требуемого передаточного отношения педального привода, примем размер a,c,d равными 170мм, 110мм, 60мм соответственно, а также диаметры рабочего dr2=28мм и главного цилиндра dr1=26мм Вычисляем значение размера b: 𝑏 = 𝑎*𝑐*𝑑𝑟2  22 (44) 𝑈1*𝑑*𝑑𝑟1 Вычислим ход педали: 𝑏 = 170 * 110 * 28  14.29 * 60 * 26 14.29 * 60 * 26= 23.48mm 𝑆пeд = * 𝑈пc + ∆2 * 𝑈1 (45) Где s=(1.5…2.0)мм величина отвода нажимного диска; ∆2=(3,5…4) зазор между рычагами сцепления и выжимного подшипника 𝑆пeд = 1.7 * 50 + 3.5 * 14,29 = 135,015mm Вычислим усилие на педаль: 𝑃пeд 𝑃 = 1.2*𝑀𝑒𝑚𝑎𝑥* пeд µ*𝑟cp*𝑧𝑥*𝑈пc*𝑦пc  = 1,2 * 402 * 1,6 = 1,2 * 402 * 1,60,4 * 0,2625 * 2 * 50 * 0,9 = 81.67 H (46) Где ϻ=0,4 коэффициент трения пc - кпд привода сцепления (принимаем 0,9) 𝑟cp = 0,5 * (Дh + 𝑑h) (47) 𝑟cp = 0,5 * (340 + 185) = 262,5(0,2625) 𝑃пeд = 81.67H ≤ 𝑃пeд ≤ 150H При максимально возможном ходе педали усилие на ней не превосходит 150 Н, следовательно, применять усилитель нет необходимости. ЗаключениеТаким образом мы спроектировали сцепление и привод сцепления, отвечающий основным требованиям: Надежная передачи крутящего момента от двигателя к трансмиссии Плавность и полнота включения / выключения Минимальный момент инерции ведомых элементов Хороший отвод теплоты от поверхности трения Предохранение трансмиссии от динамических нагрузок Поддержание нажимного усилия в заданных пределах в процессе эксплуатации минимальные затраты физических усилий на управление хорошая уравновешенность. Кроме того, выполняется и такие требования как обеспечение минимальных размеров и массы. Простота устройства и обслуживания. Технологичность. Ремонтопригодность. Низкий уровень шума. Список литературыКраткий автомобильный справочник /Гос.НИИавтомоб.трансп.– М.:Транспорт, 1976, 1979, 1984, 1994. Автомобильные транспортные средства /Под ред. Д. П. Великанова. –М.: Транспорт, 1977. –326 с. Автомобиль (основы конструкции)/Под ред. Островцева А.Н. – М.: Машиностроение, 1976. Гаспарянц Г.А. Конструкция, основы теории и расчете автомобиля.– М.: Машиностроение, 1979. Цимбалин В.В. и др. Шасси автомобиля: Атлас конструкций. – М.: Машиностроение, 1977.    1  |