Реферат АУЖЦП. Габидуллин И.Р. АУЖЦП РЕФЕРАТ. Реферат по дисциплине Адаптивные и оптимальные цифровые системы управления по теме Прохождение случайной функции через стационарную линейную систему
 Скачать 371.51 Kb. Скачать 371.51 Kb.
|

Кафедра АТПП Реферат по дисциплине «Адаптивные и оптимальные цифровые системы управления» по теме: «Прохождение случайной функции через стационарную линейную систему» Выполнил: студент гр. ЗАТу-1-20 Габидуллин И.Р. Преподаватель: к.т.н., доцент каф. АТПП, Борисова О.В. Казань 2023 СОДЕРЖАНИЕ Стр «КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ЭНЕРГЕТИЧЕСКИЙ УНИВЕРСИТЕТ» 1 ВВЕДЕНИЕ________________________________________________________ 3 СЛУЧАЙНЫЕ ПРОЦЕССЫ_________________________________________5 СТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ПРОЦЕССЫ__________ ___________ 11 ПРОХОЖДЕНИЕ СЛУЧАЙНОГО СИГНАЛА ЧЕРЕЗ ЛИНЕЙНУЮ СИСТЕМУ_______________________________________________________ 14 ЗАКЛЮЧЕНИЕ___________________________________________________24 ЛИТЕРАТУРА____________________________________________________26 ВВЕДЕНИЕ Прежде чем рассматривать поведение автоматических систем при случайных воздействиях, напомним некоторые сведения о случайных величинах, случайных процессах и об их вероятностных характеристиках. К категории случайных событий можно отнести такие, точное предсказание протекания которых в каждом отдельном случае оказывается невозможным. Так, например, если бросать монету, то выпадение герба или цифры будет случайным событием. Если повторить этот эксперимент N раз, то можно зафиксировать определенное число выпадений герба и число выпадений цифры Относительная величина называется частотой события выпадения герба, а величина — частотой события выпадения цифры. Если устремить число экспериментов до бесконечности, то частоты событий будут стремиться к некоторому пределу называемому вероятностью данного события. В рассмотренном случае очевидно, что обе вероятности выпадения герба и цифры одинаковы и равны 0,5. Вероятность каждого события лежит в интервале  Рис. 11.1. Если событие является невозможным, вероятность его равна нулю; если событие является достоверным, его вероятность равна единице. В примере с бросанием монеты рассматривалась дискретная случайная величина, которая могла принимать два фиксированных значения — выпадение герба и выпадение цифры. Существуют случайные величины, которые могут принимать непрерывные значения. Так, например, если рассмотреть стрельбу из орудия (рис. 11.1), то расстояние от орудия до места падения снаряда будет случайной величиной, которая на определенном отрезке может принимать все возможные значения. В этом случае можно говорить о вероятности нахождения случайной величины в некотором интервале от и до Таблица 11.1  СЛУЧАЙНЫЕ ПРОЦЕССЫ Случайная величина х, изменяющаяся во времени t, называется случайным или стохастическим процессом. Случайный процесс не есть определенная кривая х (t), а является множеством возможных кривых х (t), так же как случайная величина не имеет определенного значения, а является совокупностью (множеством) возможных значений. Можно еще сказать, что случайный процесс есть такая функция времени, значение которой в каждый момент времени является случайной величиной. Примерами случайных процессов могут, например, являться: координаты самолета, замеряемые радиолокационной станцией; угол визирования движущейся цели головкой самонаведения; помехи в системе телеуправления; нагрузка электрической сети и т. п. Итак, в случайном процессе нет определенной зависимости х (t). Каждая кривая множества (рис. 11.11) является лишь отдельной реализацией случайного процесса. Никогда нельзя сказать заранее, по какой кривой пойдет процесс. Однако случайный процесс может быть оценен некоторыми вероятностными характеристиками. В каждый отдельный момент времени  свой закон распределения. Поскольку это — непрерывная случайная чина, то надо пользоваться понятием плотности вероятности. Обозначим причем по свойству (11.14) для каждого из них Для каждого заданного момента времени можно найти характеристики случайных величин, определенные в § 11.1. В результате будем иметь среднее по множеству (математическое ожидание) и дисперсию Среднее значение случайного процесса представляет собой некоторую среднюю кривую (рис. 11.12), около которой группируются все возможные отдельные реализации этого процесса, а дисперсия D(t) или среднеквадратичное отклонение σ(t) характеризуют рассеяние отдельных возможных реализаций процесса около этой средней кривой. Кроме этих осредненных характеристик величины Переход к пределу здесь необходим для того, чтобы характеризовать не какой-нибудь отдельный участок кривой, а всю возможную кривую х (t) в целом. Для того чтобы знать связь между возможными значениями случайной функции х (г) ъ последующие моменты времени со значениями в предыдущие моменты, вводится понятие двумерной плотности вероятности смысл которого можно пояснить следующим образом. Вероятность того, что в момент времени t1 величина х находится в интервале 
между ними. Простейшим типом случайного процесса является чисто случайный процесс. В таком процессе все значения случайной величины в отдельные моменты времени и вообще Это — самые простые соотношения в теории случайных процессов. Они могут применяться для характеристики некоторых видов помех (чисто случайные хаотические помехи). Для характеристики полезных входных сигналов систем регулирования и следящих систем соотношения (11.39) и (11.40) практически не могут применяться, так как для этих сигналов ход процесса в последующие моменты времени в какой-то степени зависит от того, что было в предыдущие моменты времени. Так, например, если речь идет о слежении за самолетом, то он не может как угодно быстро менять свое положение и скорость. Поэтому если он в момент времени t1 занял положение х1, то этим самым его возможное положение х2 в следующий момент t2 ограничено, т. е. события Кроме того, имеет место следующая связь между основными плотностями вероятности: так как Написанные соотношения справедливы для случайных процессов любых типов. В зависимости же от того, до какого порядка принимаются во внимание плотности вероятности, а также от разных дополнительных гипотез о формах связи между Другая классификация всех случайных процессов состоит в разделении их на стационарные и нестационарные. Теория стационарных случайных процессов наиболее разработана и чаще всего применяется на практике.  СТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ПРОЦЕССЫ Стационарным случайным процессом называется такой процесс, вероятностные характеристики которого не зависят от времени. Все плотности вероятностей Можно сказать, что стационарный случайный процесс в какой-то мере аналогичен обычным стационарным или установившимся процессам в автоматических системах. Например, при рассмотрении обычных установившихся периодических колебаний ничего не изменится, если перенести начало отсчета на какую-нибудь величину. При этом сохранят свои значения такие характеристики, как частота, амплитуда, среднеквадратичное значение и т. п. В стационарном случайном процессе закон распределения один и тот же для каждого момента времени, т. е. плотность вероятности не зависит от времени: Отсюда получаем будет прямая .процессе, определяемое Аналогичным образом и двумерная плотность вероятности также будет «одна и та же для одного и того же промежутка времени и также для n-мерной плотности вероятности. Задание всех этих функций распределения плотности определяет случайный процесс. Однако более удобно иметь дело с некоторыми осреднен-ными и характеристиками процесса. Прежде чем перейти к ним, отметим два важных для практики ^свойства. 1.Ограничиваясь только стационарными случайными процессами, можно будет определить только установившиеся (стационарные) динамиче--ские ошибки автоматических систем при случайных воздействиях. Такой прием применялся и ранее при рассмотрении регулярных воздействий, когда определялись динамические свойства систем регулирования по величине динамических ошибок в установившемся периодическом режиме. 2.Стационарные случайные процессы обладают замечательным свойством, которое известно под названием эргодической гипотезы. Для стационарного случайного процесса с вероятностью, равной единице (т. е. практически достоверно), всякое среднее по множеству равно соответствующему среднему по времени, в частности В самом деле, поскольку вероятностные характеристики стационарного случайного процесса с течением времени не меняются (например, Для многих случаев существует математическое доказательство этого свойства. Тогда оно сводится к эргодической теореме. Итак, среднее значение (математическое ожидание) для стационарного «процесса будет Аналогичным образом могут быть записаны моменты более высоких порядков — дисперсия, среднеквадратичное отклонение и т. п. Эргодическая гипотеза позволяет сильно упрощать все расчеты и эксперименты. Она позволяет для определения Таким образом, важное свойство стационарного случайного процесса •состоит в том, что отдельная его реализация на бесконечном промежутке времени полностью определяет собой весь случайный процесс со всеми бесчисленными возможными его реализациями. Этим свойством не обладает никакой другой тип случайного процесса. ПРОХОЖДЕНИЕ СЛУЧАЙНОГО СИГНАЛА ЧЕРЕЗ ЛИНЕЙНУЮ СИСТЕМУ Рассмотрим линейную систему (рис. 11.25) с передаточной функцией W(р) и функцией веса Выходной сигнал х2 (t) на основании формулы свертки (7.44) Рассматривая в этой формуле математические ожидания, имеем Для получения корреляционной функции на выходе запишем исходную формулу для центрированных значений  (11.96) (11.96)После перемножения получим  (11.97) (11.97)Далее, переходя к математическому ожиданию, можно найти корреляционную функцию Для определения дисперсии на выходе О2(1) в формуле (11.98) следует положить  (11.99) (11.99)В случае использования канонического разложения случайной функции выходная величина может быть представлена в виде  где Корреляционная функция выходного сигнала а дисперсия Для нахождения математического ожидания В случае, когда на входе (рис. 11.25) действует случайный стационарный процесс, корреляционная функция а дисперсия – из (11.99) Если рассматриваемая система устойчива, то (11.105) и (11.1 06) , если положить Тогда Пусть, например, на входе интегрирующего звена с передаточной функцией т. е. дисперсия растет пропорционально времени. Нетрудно видеть, что Для расчета установившегося стационарного процесса на выходе системы (рис. 11.25) более удобно исходить из известной спектральной плотности на входе Это же соотношение имеет место и для выходного сигнала:  В линейной системе изображения Фурье Отсюда можно найти  (11.109) (11.109)Таким образом, спектральная плотность выходной величины может быть получена умножением спектральной плотности входной величины на квадрат модуля частотной передаточной функции линейной системы. Отметим, что приведенное выше доказательство, вообще говоря, не является строгим, так как существование стационарного случайного процесса на выходе не доказано. При известной спектральной, плотности Получим выражение (11.109) более строго. Для этого используем формулу (11.107). Так как в реальных системах весовая функция тождественно равна нулю при t < 0, то нижние пределы интегрирования можно положить равными центрированный процесс Найдем теперь спектральную плотность для выходного сигнала. Она связана с корреляционной функцией соотношением (11.65): Подставляя в последнюю формулу значение корреляционной функции из (11.110), получаем Последнее выражение совпадает с (11.109), что и требовалось доказать, Для нахождения дисперсии, или среднего квадрата выходной величины, необходимо проинтегрировать по всем частотам спектральную плотность:  (11.112) (11.112)Отметим, что закон распределения для случайной величины может, вообще говоря, меняться при прохождении ее через линейную систему. Однако, в случае, если на входе линейной системы имеется нормальное распределение случайной величины х1 (t), то на выходе для случайной величины х2 (t) также будет иметь место нормальное распределение. При вычислении интеграла (11.112) обычно приходится иметь дело с подынтегральным выражением вида 
системе может быть не выше 2n — 2. Для удобства интегрирования написанное выше выражение обычно представляют в виде Полином множитель j означает поворот комплексного числа на угол Таким образом, вычисление дисперсии (11.112) можно свести к нахождению интеграла  (11.113) (11.113)В общем случае, при любом га для устойчивой системы интеграл 1п может быть представлен в виде [38] где  (11.115) (11.115)совпадает со старшим определителем Гурвица, а числитель определяется выражением  (11.116) (11.116)Интегралы такого вида вычислены до n = 7 и сведены в таблицы (см. приложение 2). Заметим, что знаменатель правых частей приведенных в приложении 2 формул представляет собой В заключение рассмотрим два важных случая прохождения случайного сигнала через линейную систему. Статистическое дифференцирование. При поступлении случайного сигнала на идеальнбе дифференцирующее устройство с передаточной функцией W (р) = р спектральная плотность выходной величины (производной от входной величины) может быть получена умножением спектральной плотности входной величины на при двойном дифференцировании — на 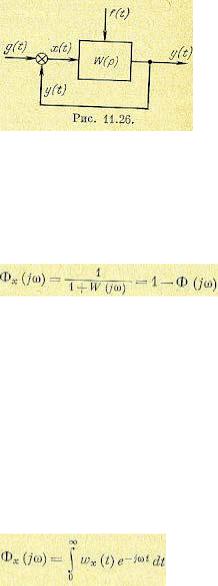 Статистическое интегрирование. При поступлении случайного сигнала на идеальное интегрирующее звено с передаточной функцией от входной величины) может быть получена делением интегральной плотности входной величины на при двойном интегрировании — на ЗАКЛЮЧЕНИЕ До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д.). Однако во многих случаях характер воздействия бывает таким, что его нельзя считать определенной функцией времени. Оно может принимать с течением времени самые разнообразные случайные значения. В таких случаях мы можем оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени. Это происходит не потому, что оно неизвестно заранее, а потому, что сама природа реального задающего или возмущающего воздействия такова, что величина его в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно или с любым сдвигом во времени И т. д. Возьмем, например, систему автоматического регулирования напряжения электрического генератора. Возмущающее воздействие здесь является результатом изменения нагрузки в сети, зависящей от включения, выключения и изменения режима работы множества потребителей электрической энергии. Другой пример — автопилот. На него действуют обычно возмущающие воздействия случайного характера: порывы ветра и изменения других атмосферных факторов, изменение тяги, изменения напряжения питания усилителей и рулевых машинок и т. д. Третий пример — следящие системы, на вход которых попадают вместе с полезным сигналом помехи. Например, в радиолокационной системе сопровождения отраженный от цели сигнал содержит в себе помехи в виде многочисленных флуктуаций, происходящих от вибраций и поворотов цели, замирания сигнала и т. п. Аналогичные помехи случайной природы имеют место в других автоматических устройствах. ЛИТЕРАТУРА 1. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. – СПб: Изд-во «Профессия», 2004. – 752 с. 2. Душин С.Е., Зотов Н.С., Имаев Д.Х. и др.Теория автоматического управления. Учебник/под ред. В.Б. Яковлева.-2-е изд.,перераб.-М.:Высш. шк.,2005.-567с 3. Ерофеев А.А..Теория автоматического управления. Учебник/ -2-е изд.,доп.и перераб.-СПб.:Политехника,2005.-302с. | |||||||||||||||