Системы координат. Углы ориентации летательного аппарата. Реферат Системы координат. Углы ориентации ЛА_2. Реферат по дисциплине Введение в авиационную, ракетную и космическую технику на тему Системы координат. Углы ориентации летательного аппарата (ЛА).
 Скачать 0.9 Mb. Скачать 0.9 Mb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Федеральное государственное бюджетное образовательное учреждение высшего образования «Московский авиационный институт (национальный исследовательский университет)» Институт № 3 «Системы управления, информатика и электроэнергетика» Кафедра 315 «Управление высокотехнологичными предприятиями» РЕФЕРАТ по дисциплине: «Введение в авиационную, ракетную и космическую технику» на тему: «Системы координат. Углы ориентации летательного аппарата (ЛА).» Выполнила студентка группы: М3О – 123Б – 21 Кутузова Ксения Альбертовна Научный руководитель: д.т.н., проф. Зайцев А.В. Москва 2021 Содержание Введение 2 Системы координат 3 Системы координат, связанные с Землей 3 Системы координат, связанные с летательным аппаратом 6 Углы ориентации ЛА 10 Угол атаки 10 Угол скольжения 11 Углы Эйлера 14 Угол тангажа 15 Угол рыскания 16 Угол крена 17 Заключение 19 Список литературы 20 ВведениеСовременный мир невозможно представить без авиации и ракетно-космической техники. Они играют важную роль для каждого человека. Появление различных летательных аппаратов способствовало открытию огромного количества возможностей перед человеком, а также значительно упростило нашу жизнь. Поэтому важно и дальше уделять большое внимание этой сфере и способствовать её развитию. При изучении летательных аппаратов, а также для решения различных задач, необходимо прежде всего грамотно им управлять и знать его положение не только в пространстве, но и относительно других объектов. Земля находится в постоянном движение, поэтому для решения различных прикладных задач, прогнозирования движения спутников, вычисления их орбит следует рассматривать как неподвижные системы отсчета, так и иные. Для более точного управления необходимо изучить также углы ориентации, оказывающие большое влияние на траекторию движения летательного аппарата, и углы Эйлера, отвечающие за поворот тела в трехмерном пространстве. Цель: изучить системы координат и углы ориентации летательного аппарата. Системы координатАэродинамические расчёты и изучение динамики движения летательного аппарата предполагают собой использование различных систем координат. Сделав удобный выбор системы отсчёта (координат), можно упростить уравнение движения объекта в задачах динамики. В некоторых ситуациях правильный выбор также способствует улучшению информативности определения положения тела в пространстве. Системы координат (СК), которые применяют в динамике полета, представляют собой правые прямоугольные декартовые системы. Говоря о правых системах координат, предполагаем, что для наблюдателя, смотрящего из положительного направления оси OZ на плоскость XOY кратчайшим направлением поворота положительной полуоси OX в положение положительной полуоси OY является направление против часовой стрелки. Для характеристики систем координат необходимо задать некоторое положение начало координат, опорное направление и основную плоскость. Выделяют системы координат, связанные с землей, и системы координат, связанные с летательным аппаратом (ЛА). Системы координат, связанные с ЗемлейРассмотрим системы координат, применение которых связано с моделями движения космического аппарата в околоземном пространстве: Инерциальная (абсолютная геоцентрическая экваториальная) система координат OИXИYИZИ (рис.1) представляет систему координат, начало которой (ОИ) находится в центре Земли, а основной плоскостью при этом является плоскость экватора (ОИXИYИ). Ось OИXИ в день весеннего равноденствия параллельна линии Земля-Солнце. Ось OИZИ направлена вдоль оси вращения Земли в сторону северного полюса. Ось OИYИ дополняет систему координат до правой. Эта система координат считается инерциальной в связи с тем, что направление её осей не зависит от времени (то есть оно неизменно относительно звёзд), при этом ускорением движения системы относительно Солнца можно пренебречь. Однако важно также отметить, что начало инерциальной системы координат может и не совпадать с центром Земли. Инерциальные системы, которые не участвуют в суточном вращении Земли называют небесными или звёздными. Земная (вращающаяся геоцентрическая экваториальная) система координат OОXОYОZО (рис.1) так же, как и инерциальная имеет начало в центре Земли (то есть совпадает с OО). Ось OОXО лежит в плоскости экватора и пересекает гринвичский меридиан. Ось OОZО направлена вдоль оси вращения в сторону северного полюса. Ось OОYО дополняет систему координат до правой. Система координат вращается вместе с Землей вокруг оси OОZО с угловой скоростью вращения Земли. ϕ – геоцентрическая широта, λ – геоцентрическая долгота  – расстояние от центра Земли до центра масс летательного аппарата, λ0 = ω3·S0 – угол между осями OИXИ OОXО, ω3 – угловая скорость вращения Земли, ω3 = 7,2921·10-5 рад/с. – расстояние от центра Земли до центра масс летательного аппарата, λ0 = ω3·S0 – угол между осями OИXИ OОXО, ω3 – угловая скорость вращения Земли, ω3 = 7,2921·10-5 рад/с.Земная система координат используется для того, чтобы определить положение летательного аппарата в качестве точечного объекта относительно наземных ориентиров. Для ближних полетов можно ограничиться прямоугольной системой, а в дальних, где необходимо учитывать, что Земля представляет собой «шар», используют полярную систему координат. Оси координат обычно привязываются к базовым наземным ориентирам, которые используются при прокладке маршрута полёта. Стартовая система координат OСXСYСZС (рис. 1) имеет начало OС на поверхности Земли и совпадает с точкой старта летательного аппарата в начальный момент движения. Ось OСYС направлена вверх по прямой, совпадающей с направлением силы тяжести в рассматриваемой точке. Направление осей OСXС и OСZС зависит от конкретной задачи. Данная система координат вращается вместе с Землей. Скорость летательного аппарата относительно земной и стартовой систем при этом является называют земной скорость летательного аппарата. 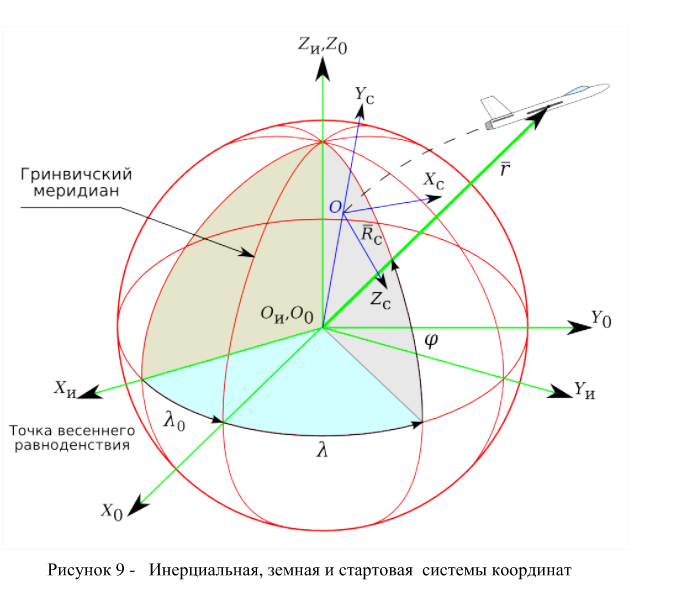 Рисунок 1 Инерциальная, земная и стартовая системы координат Системы координат, связанные с летательным аппаратомСистемы координат, связанные с летательным аппаратом, по-другому еще называют подвижными системами, то есть системами начало которых находится в центре масс летательного аппарата. Подвижные системы координат используются для записи векторных уравнений движения в проекциях. Для данных систем координат важно задать опорное направление и основную плоскость по отношению к системе отсчета или эйлеровы углы. Нормальная система координат OXgYgZg (рис.2, 4) имеет начало в центре масс летательного аппарата (O). Ось OXg направлена на север по касательной к географическому меридиану. OZg, в свою очередь, параллельна касательной к географической параллели в направлении запад-восток. Ось OYg направлена вверх по местной вертикали. Точка O описывает трассу полёта ЛА и определена координатами ϕ (широта) и λ (долгота). Плоскость OXgZg совпадает с местной горизонтальной плоскостью. В процессе движения летательного аппарата нормальная система координат поворачивается относительно стартовых осей с угловой скоростью, которую вычисляют по формуле:  Также направление осей OXg и OZg обычно зависит от конкретной задачи. Связанная система координат OXYZ (рис. 2, 3) имеет начало в центре масс летательного аппарата. Ось OX является продольной и имеет направление по оси симметрии вперед и параллельна ей. OY представляет собой нормальную ось, лежит в плоскости симметрии и направлена вверх. Ось OZ – поперечная ось, которая дополняет данную систему до правой. Все три оси жестко фиксированы по отношению к ЛА. Положение связанной СК определяется углами Эйлера (углы тангажа, крена и рысканья). Связанная система координат используется для того, чтобы определить положение различных объектов внутри летательного аппарата. В проекциях на оси данной системы координат могут задаваться аэродинамические силы (продольная, нормальная и поперечная) и моменты (крена, рыскания и тангажа соответственно, действующие на летательный аппарат в полёте. 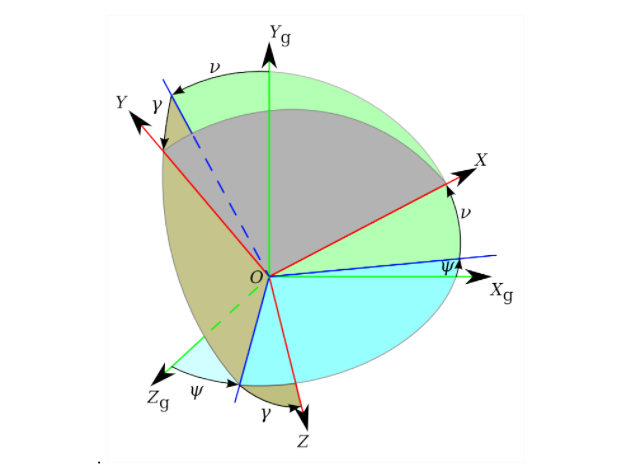 Рисунок 2 Нормальная и связанная системы координат Скоростная система координат OXaYaZa (рис. 3) имеет начало в центре масс летательного аппарата, как и две предыдущие системы. Ось OXa направлена по воздушной скорости  или скоростной оси. OYa лежит в плоскости симметрии летательного аппарата и направлена вверх (ось подъемной силы). OZa дополняет данную систему координат до правой и имеет боковое направление (ось боковой силы). или скоростной оси. OYa лежит в плоскости симметрии летательного аппарата и направлена вверх (ось подъемной силы). OZa дополняет данную систему координат до правой и имеет боковое направление (ось боковой силы).Как и связанная система координат, скоростная определяется углами Эйлера, однако по отношению к нормальной системе координат она повернута на углы ψa, ϑa, ϒa – скоростные углы тангажа, рысканья и крена, которые выводятся аналогично Эйлеровым углам связанной СК. Скоростная система координат используется для определения положения летательного аппарата относительно воздушного потока и расчета аэродинамических сил, действующих на летательный аппарат. В связи с этим основным направлением в этой системе координат будет направление воздушной скорости самолета V (то есть скорости относительно воздушной среды). Если воздух неподвижен, то воздушная скорость будет совпадать с земной.  Z=Ze 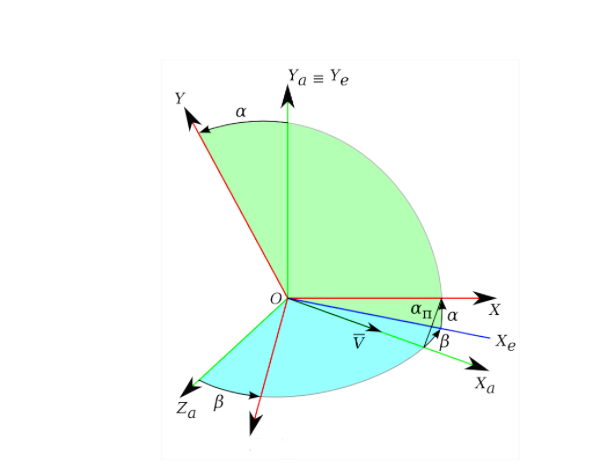 Рисунок 3 Скоростная, связанная и полусвязанная системы координат Полусвязанная система координат OXeYeZe (рис. 3) также имеет начало в центре масс летательного аппарата. Ось OXe направлена по проекции воздушной скорости на плоскость симметрии летательного аппарата. OYe совпадает с OYa скоростной системы координат, то есть лежит в плоскости симметрии и направлена вверх. Ось OZe совпадает с OZ связанной системы координат, иными словами, совпадает с поперечной осью летательного аппарата. Траекторная система координат OXKYKZK (рис. 4) имеет начало в точке O, то есть в центре масс летательного аппарата. Ось OXK совпадает с направлением земной скорости летательного аппарата или, другими словами, со скоростью летательного аппарата относительно Земли. OYK лежит в вертикальной плоскости летательного аппарата, проходящей через ось OXK. OZK дополняет данную систему координат до правой.Рассмотрим также углы, образующиеся в траекторной системе координат. Угол пути Ψ является углом между проекцией земной скорости ЛА на местную горизонтальную плоскость OXgZg и осью OXg. Угол наклона траектории θ представляет собой угол между земной скоростью и горизонтальной плоскостью. При отсутствии ветра Ψ=ψK, θ=ϑK оси OXa OXK совпадают. 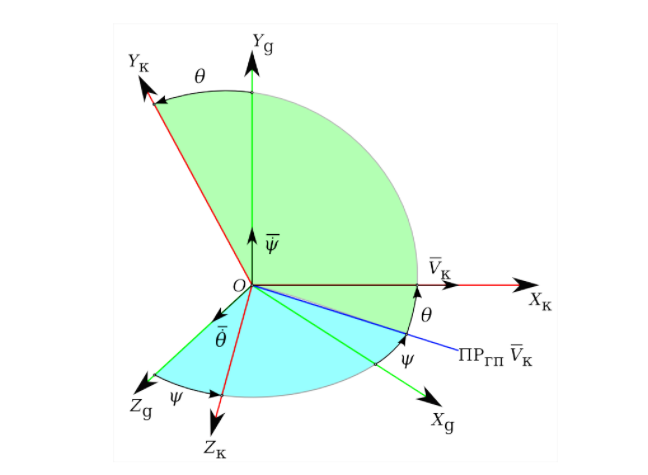 Рисунок 4 Нормальная и траекторная системы координат Углы ориентации ЛАРазнообразие систем координат, которые используются часто совместно в определенной задаче по исследованию движения летательного аппарата, приводит к необходимости установления связи между различными системами координат. Взаимное положение систем координат определяется двумя факторами: взаимным положением начал систем координат; взаимным угловым положением осей систем координат. Первый фактор определяется скоростью движения центра масс летательного аппарата относительно земной поверхности. Второй, в свою очередь определяется с помощью той или иной системы углов. Угол атакиУгол атаки α (рис. 5) –угол между направлением вектора скорости набегающего на тело потока (жидкости или газа) и характерным продольным направлением, выбранным на теле (продольной осью ЛА). Этот угол является ключевой характеристикой движения летательного аппарата и определяет подъемную силу крыла. Его необходимо считать положительным, если проекция скорости на нормальную ось отрицательна. Также существует понятие пространственного угла атаки. Он представляет собой угол между продольной осью летательного аппарата и проекцией его скорости. Его особенностью является то, что этот угол всегда положителен. Пространственный угол атаки вычисляется по следующей формуле:  где β – угол скольжения летательного аппарата.  Рисунок 5 Угол атаки Интересным фактом может послужить то, что существуют самолеты, способные изменять угол атаки (путем изменения угла установки крыла) в полете или на земле. Примером может служить американский палубный самолет А-8. Угол скольженияСкольжением в авиации называют движение летательного аппарата относительно воздуха, в процессе которого встречный воздух набегает на самолет не строго спереди, а сбоку, под углом к плоскости симметрии. Угол, под которым набегает воздух называется углом скольжения. Угол скольжения β (рис. 6) представляет собой угол между плоскостью симметрии летательного аппарата и направлением его скорости. Угол скольжения следует считать положительным при условии, что проекция скорости летательного аппарата на поперечную ось положительна.  Рисунок 6 Угол скольжения Угол скольжения является аналогом угла атаки. Различие между углом атаки и углом скольжения заключается в том, что угол атаки является углом между летательным аппаратом и направлением набегающего потока в вертикальной плоскости, а угол скольжения – в горизонтальной плоскости. Углы атаки и скольжения определяют взаимное положение связанной и скоростной систем короординат (рис. 7).  Рисунок 7 Взаимное положение связанной и скоростной системы координат Углы ЭйлераУглы Эйлера (рис. 8) – это три угла, которые определяют последовательные повороты (взаимное положение) твердого тела или связанной с ним системы координат относительно исходной системы координат. При использовании углов Эйлера для того, чтобы описать положение летательного аппарата в пространстве необходимо задавать последовательность поворотов и связь между осями и углами.  Рисунок 8 Эйлеровы углы Повороты системы на углы Эйлера называются прецессия, нутация и поворот на собственный угол или вращение. Углы Эйлера позволяют привести любое положение системы к текущему. Обозначим начальную СК как (x, y, z), а конечную как (X, Y, Z). Пересечение координатных плоскостей xy и XY называется линией узлов N. Прецессия – явление, при котором ось вращения тела меняет свое направление в пространстве. Углом прецессии будет называться угол α между осью x и линией узлов. Нутация – слабое нерегулярное движение вращающегося твёрдого тела, совершающего прецессию. Угол нутации – угол между осями z и Z. Вращение – круговое движение объекта. Угол собственного вращения представляет собой угол между линией узлов и осью X. Говоря об ориентации летательных аппаратов относительно какой-либо системы координат, рассмотрим три угла, соответствующих Эйлеровым – угол тангажа, угол рыскания и угол крена. Эти углы также называют самолетными (корабельными) углами Угол тангажаТангаж – угловое движение летательного аппарата относительно главное поперечной оси инерции. Выделяют два вида тангажа: положительный и отрицательный. При положительном тангаже идет увеличение угла тангажа, то есть подъем носа, и происходит процесс кабрирования. При отрицательном тангаже – уменьшение угла тангажа, опускание носа, пикирование. Данные манёвры осуществляются путем создания момента тангажа за счёт отклонения органов управления: руля высоты или элевонов. Углом тангажа ϑ (рис. 9) называют угол между продольной осью летательного аппарата и горизонтом. Угол тангажа оказывает влияние на составляющую подъемной силы, которая уравновешивает вес самолёта. 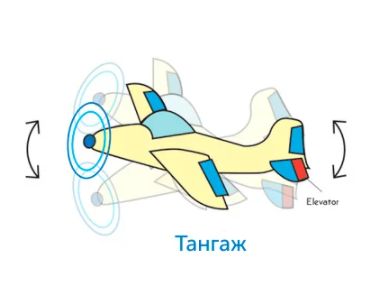 Рисунок 9 Угол тангажа Угол рысканияВ понятие рыскания входят угловые движения летательного аппарата относительно вертикальной оси и небольшие изменения курса вправо (влево). Угол рыскания ψ (рис. 10) – угол поворота корпуса летательного аппарата в горизонтальной плоскости. Обычный рассматриваемый диапазон углов рыскания – ±180 градусов. Угол рыскания изменяется с помощью руля направления или поверхности, заменяющей его. 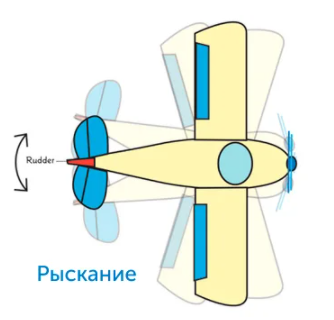 Рисунок 10 Угол рыскания Угол кренаКреном называют поворот летательного аппарата вокруг его продольной оси. Крен осуществляется с помощью элеронов или иных частей, выполняющих их функцию. Положительным принято считать крен против часовой стрелки. На практике также применяются такие выражения, как «правый крен», «левый крен». Если летательный аппарат повернуть вокруг его продольной оси на 180 градусов, то ЛА будет считаться перевернутым вверх дном, такой поворот называется оверкилем. Углом крена ϒ или же углом вращения (рис. 11) летательного аппарата, очевидно, является угол поворота летательного аппарата относительно его продольной оси. 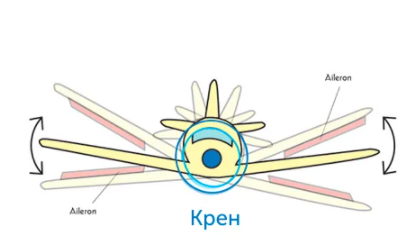 Рисунок 11 Угол крена В полете допустимым пределом значений угла крена является 25 градусов. При обходе препятствий этот предел увеличивается до 30 градусов. Максимальное допустимое значение угла крена составляет 67 градусов. Однако в критических ситуациях разрешается превышать максимальные значения угла крена в целях сохранения жизни пассажиров. Важно также отметить, что ограничение для каждого летательного аппарата существует свое и вычисляется в зависимости от прочности, конструкции, скорости и аэродинамики. ЗаключениеАвиация действительно является важной отраслью в жизни человека, сильно изменившей его мир. Поэтому необходимо и дальше развивать ее, привлекая к ней все большее количество людей. Итак, обращаясь к теме управления летательным аппаратом, для описания положения ЛА в пространстве используют системы координат, связанные с Землей (инерциальная, земная, стартовая) и системы координат, связанные непосредственно с летательным аппаратом (нормальная, связанная, скоростная, полусвязанная, траекторная), углы ориентации (угол атаки и угол скольжения) и углы Эйлера (угол тангажа, угол рыскания, угол крена). Правильный выбор системы отсчета значительно упрощают решение определенной задачи, а углы ориентации и углы Эйлера определяют взаимное положение систем координат. Таким образом положение летательного аппарата в пространстве определяется системами координат, углами ориентации и углами Эйлера. Они задают его траекторию, направление и другие характеристики. Именно поэтому системы координат и углы ориентации занимают особое место в современной авиационной, ракетной и космической технике. Список литературыБелов С.В., Гордиенко А.В., Проскурин В.Д. «Аэродинамика и динамика полёта: учебное пособие». Энциклопедия «Авиация» Г.П.Свищев. ГОСТ 2005880 «Динамика летательных аппаратов в атмосфере. Термины определения и обозначения». Чепурных И.В. «Динамика полёта самолётов»: учебное пособие. https://avia.pro http://aerodriving.ru Д.Н. Назаров, А.Н.Никитин, Е.В.Тарасова «Экспериментальная аэродинамика»: учебное пособие. http://ooobskspetsavia.ru/ https://studopedia.su/2_61192_ugli-ispolzuemie-dlya-opredeleniya-polozheniya-letatelnogo-apparata.html |