ТОАТ КУРСОВОЙ. Реферат Построение функциональной схемы сау эп
 Скачать 1.23 Mb. Скачать 1.23 Mb.
|

|
5. Построение структурной схемы ЭП и её преобразование. Путем объединения структурных схем узлов ТП, ДПТ и механической части ЭП получат общую структурную схему ЭП как объекта управления САУ. Такая схема представлена на рисунке 5.1.  Рисунок 5.1 – Общая структурная схема ЭП как объекта управления САУ. Отметим воздействия, приложенные к объекту: Uy – напряжение управления – управляющее воздействие на объект; Uп, Мд.пот., Мн.с. – соответственно, напряжение питания ЭП, момент потерь в двигателе, момент сопротивления на ЭП. Причем, изменение Мн.с. – возмущающее воздействие нагрузки, а изменения Uп и Мд.пот – возмущающие воздействия помех; ωк – угловая скорость вращения вала нагрузки – управляемая (регулируемая) величина. Даже при отсутствии контура главной обратной связи (по управляемой переменной) в САУ ЭП, структурная схема ЭП является многоконтурной. Она содержит два контура местных обратных связей по угловой скорости вращения якоря ωя и по току якоря ДПТ iя. Обычно многоконтурные структурные схемы САУ приводят к одноконтурному виду, наиболее удобному для исследования. Одноконтурная САУ имеет один контур главной обратной связи, который после размыкания представляет собой цепь из последовательно соединенных звеньев. Преобразование структурных схем к одноконтурному виду и их упрощение производят на основании определенных правил. Эти правила основаны на том что при любых преобразованиях передаточная функция по любому воздействию недолжна измениться. Основные правила преобразования приведены в таблице 2.1 [ ] При преобразовании схем имеющиеся типовые соединения звеньев (последовательное, параллельное, с внутренней обратной связью) следует заменить эквивалентным звеном. Затем выполняется перенос точек разветвления и сумматоров, чтобы в преобразованной таким образом схеме образовались новые типовые соединения звеньев. Эти соединения опять должны быть заменены эквивалентными и т.д. В процессе любых преобразований необходимо проводить и пересчет передаточных функций эквивалентных элементов и схем. Для получения преобразованной структурной схемы ЭП (блока «ТП-ДПТ-Р-Н) без контуров местной обратной связи в данном проекте предлагается провести следующие преобразования (рисунок 5.1) 1) Перенесите сумматор Σ2 влево за Σ1 (по правилу 8 [ ]); 2) Заменить контур с сумматором Σ1 эквивалентным звеном (по правилу 3 [ ]); 3) Перенести сумматоры Σ3 и Σ4 на выход вправо за звено с передаточной функцией 1/r (по правилам 4а, 9а [ ] – для каждого сумматора); 4) Заменить образовавшийся контур с сумматором Σ2 эквивалентным звеном (по правилу 3 [ ]) В результате проведенных преобразований получается структурная схема ЭП не содержащая контуров с обратными связями, которые имелись на исходной схеме (рисунок 5.1) на участках от точки действия ЭДС ет.п. до выходной переменной. Общий вид такой схемы приведен на рисунке 5.2.  Рисунок 5.2 – Общая структурная схема ЭП после преобразований По полученной схеме легко определить передаточную функцию блока «ТП-ДПТ-Р-Н» по любому воздействию. В частности, для схемы на рисунке 5.1 (после её преобразования к виду на рисунке 5.2) передаточные функции по воздействиям ет.п., Мд.пот. и Мн.с. после их приведения к стандартному виду выражаются соотношениями (с учетом знаков у сумматоров Σ3 и Σ4):  (5.1) (5.1) (5.2) (5.2) (5.3) (5.3)где   Относительно управляющего сигнала uy передаточная функция, согласно структурной схеме на рисунке 5.2, для рассматриваемого случая имеет вид (без учета БО1):  (5.4) (5.4)где  . .Используя параметры звеньев, полученные ранее, определим числовые значения всех коэффициентов и постоянных времени передаточных функций.       При этом  На основании схемы на рисунке 5.2 можно записать соотношение, связываюшее выходную переменную блока «ТП-ДПТ-Р-Н» с воздействиями uy, Мд.пот. и Мн.с.. Это выражение имеет вид[с учетом (5,6),(5,2) и (5,3)]:  (t). (5.5) (t). (5.5)6. Исследование статических и динамических характеристик ЭП на модели. Исследование статических и динамических характеристик ЭП проводится на компьютере путем моделирования с помощью программы Vissim. При структурном моделировании по структурной схеме с помощью «графического редактора» на основе «библиотеки типовых блоков» на экране дисплея строится схема модели. Затем выполняется моделирование и проводится анализ полученных результатов. Модель любого устройства или системы в Vissim представляет собой диаграмму, под которой понимают набор функциональных блоков, соединенных между собой линиями связи и отображаемым в окне диаграммы. На диаграмме все параметры звеньев (коэффициента передачи, постоянные времени и т.д.) представляются в виде конкретных чисел – это исходные и расчетные значения параметров, полученные ранее. На рисунке 6.1 приведена схема модели ЭП, построенная по структурной схеме на рисунке 5.1. Блоки модели соответствуют звеньям структурной схемы. Для возможности изменения переменных Uy , Uп, Mн.с. предусмотрены блоки SP1,SP2 и SP4 типа slider (ползунок); непосредственно на этих блоках отображаются текущие значения переменных. Постоянная величина Мд.потгенерируется блоком SP3 (блок const). В модели предусмотрены блоки G1, G2,преобразующие значения угловых скоростей ωяи ωн в значения частот вращения якоря ДПТ (nя) и вала нагрузки (nн). Измерение значений переменных Uя , iя , nя и nн производится цифровыми измерительными приборами D1  D4 (блоки display). Наблюдение за изменением во времени величин iяи nя производится с помощью осциллографов P1 и P2(блоки plot). D4 (блоки display). Наблюдение за изменением во времени величин iяи nя производится с помощью осциллографов P1 и P2(блоки plot).Проведем исследование статических и динамических характеристик ЭП как объекта управления САУ. 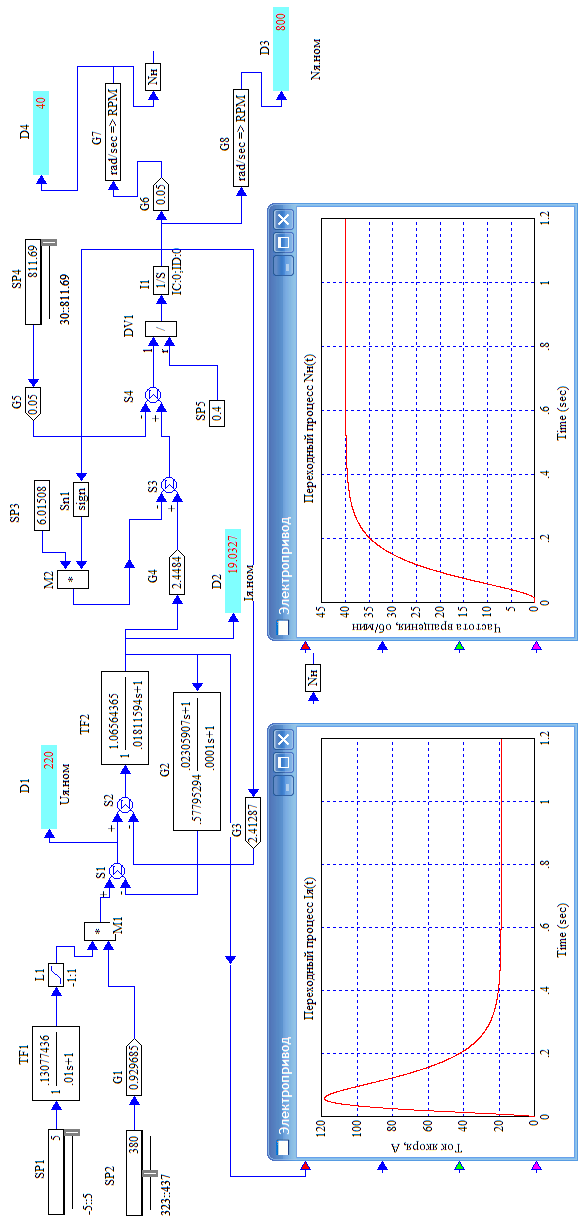 Некоторыми результатами исследований приведены на диаграмме, рисунок 6.1. Установим номинальные значения всех входных воздействий: Uy.ном=5 В, Uп.ном=380 В,Mн.с.ном=811,6902Н·м. При таких воздействий все переменные, характеризующие работу ЭП в установившемся режиме должны соответствовать номинальным значениям. Видим: Uя.ном=220В;Iя.ном =19,0797А, nя.ном =800об/мин и nн.ном =40об/мин. Эти значения приборов весьма близки к номинальным, что указывает на соответствие построенной модели ЭП его структурной схеме по крайней мере для статических режимов. Изменение выходных величин nн носит апериодический характер. Ток iя на начальном этапе переходного процесса резко нарастает и достигает больших значений ( 118А). Это обуславливается тем, что непосредственно после пуска ДПТ имеем nя =0, ЭДС ея=0, скорость нарастания тока iя ограничена только индуктивностью Lя.п, которая невелика. При ея=0 ток iя стремится к значению  (измерено на модели при отключении сигнала ея ). По мере разгона двигателя ЭДС ея возрастает и ток снижается до номинального значения. (измерено на модели при отключении сигнала ея ). По мере разгона двигателя ЭДС ея возрастает и ток снижается до номинального значения.С помощью модели ЭП исследуем влияние по нагрузке (Mн.с.) на nн в статическом режиме. Уменьшение Mн.с приводит к увеличению nн. в частности, измерения ,проведенные на модели (при Uп.), показали: изменения Mн.с.ст в заданном диапазоне (229,5 765Н·м) вызывает изменение nн.ст в пределах от 43,6183 до 40,2903 об/мин. А· Δnн.ст ·(Mн.с) 3,328об/мин.Обеспечить выполнение условия nн.=nн.з. (в заданном диапазоне nн.з. ) при действии возмущений можно только за счет изменения сигнала управления Uy. Очевидно, что минимальное значение Uy в статическом режиме соответствует Uп.ст.=Uп.макс ,Mн.с.ст=Mн.с.мин и nн.ст =nн.ст.мин=8об/мин. При моделировании было получено Uy.ст.мин.=0,961В. Максимальное значение Uy.ст соответствует Uп.ст.=Uп.min=323В, Mн.с.ст=Mн.с.макс=765Н·м и nн.ст =nн.ст.макс=40об./мин. При моделировании получено Uy.ст.макс=5,845В. Таким образом, путем изменения сигнала Uy.ст в пределах от 0,961 до 5,485В можно для статических режимов обеспечить любое значение nн. при любых внешних возмущениях. Характер кривых nн.(t) и iя.(t) говорит о том, что ЭП в статическом режиме является устойчивым ОУ(рисунок 6.1). При Uy.= Uy.ном. исследуем переходные процессы nн.(t) и iя.(t) при скачкообразных изменениях напряжения питания Uп. отUп.мин. доUп.макс(и обратно) и момента нагрузки Mн.с от Mн.с.мин до Mн.с.макс(и обратно). Для этой цели разместим на диаграмме(рисунок 6.2) генераторы, позволяющие формировать ступенчатые изменения переменных Uп.и Mн.с . Модель генераторов ступенчато изменяющихся переменных строится с помощью блоков «step» («скачок»). Добавляя к исходным значениям переменных Uп.и Mн.с соответствующие скачкообразные приращения ΔUп.и ΔMн.с с определенными знаками можно в требуемые моменты времени ступенчато изменять Uп.и Mн.с в заданных пределах. Для этого применим несколько блоков «step» и два сумматора с расширением количества входов. Для визуального упрощения диаграммы все блоки с неизменными параметрами настройки объединим в один эквивалентный блок. Программа Vissim позволяет произвести объединение любого количества блоков в единый блок с теми же характеристиками. Модель для исследования ЭП при действии возмущений и результаты этих исследований приведены на рисунке 6.2. 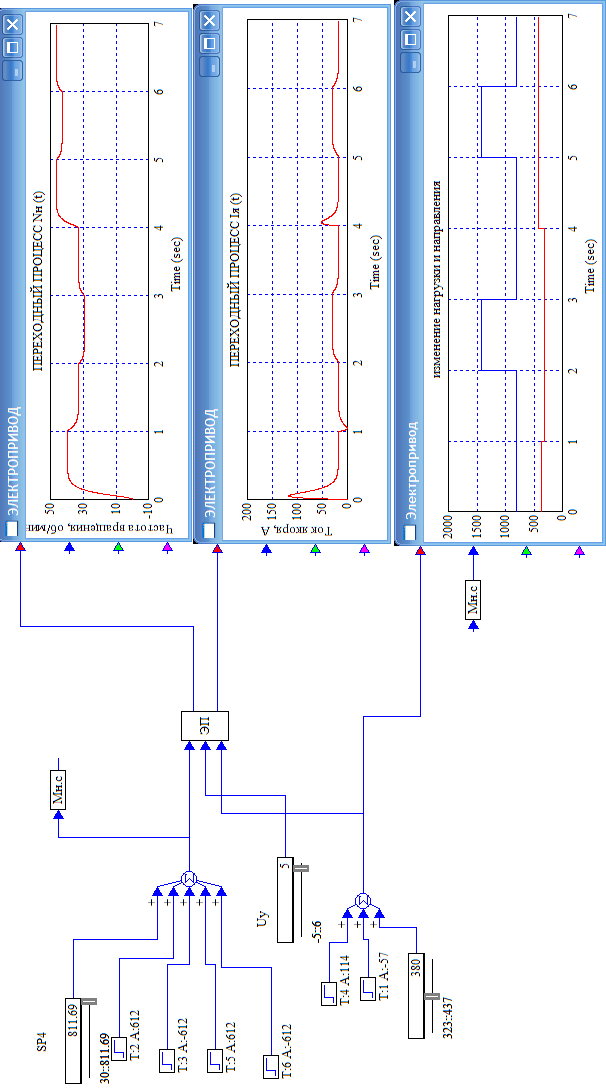 На модели объединенный блок «ТП-ДПТ-Р-Н» («тиристорный преобразователь – двигатель постоянного тока – редуктор – нагрузка») представляет собой объект управления – ЭП. Осциллограмма nн.(t) дает полное представление о зависимости частоты вращения вала нагрузки от внешних возмущений и позволяет определить диапазон её изменения в установившихся режимах. Определим максимальное и минимальное установившиеся значения переменное nн., а также максимальное отклонение Δnн.уст.макс= nн.уст.макс - nн.уст.мин. : nн.уст.макс 50,345 об./мин.nн.уст.мин. 32,966 об./мин.При nн.з.=40 максимальное отклонение фактического значения частоты вращения вала нагрузки составляет:  Анализ осциллограмм указывает на большой разброс установившихся значений частоты вращения вала нагрузки: Δnн.уст.макс=11,5 об./мин. Максимальное установившееся значение частоты вращения вала нагрузки превышает заданное (nн.макс=40об./мин)на 10 об./мин. Все это говорит о существенной зависимости значения переменной nн от внешних возмущений и необходимости использования системы автоматического управления для выполнения заданных технических условий. Характер кривых nн.(t) и iя.(t) (после снижения нагрузки nн и iя принимают первоначальное значение) говорит о том, что рассматриваемый ЭП является устойчивым ОУ. 7. Анализ САУ ЭП с пропорциональным законом управления. Цель управления электроприводом [изменение значения регулируемой переменной y(ωн) в соответствии с изменением задающего сигнала y3 и уменьшение влияния на у внешних возмущений] реализуется устройством управления (рисунок 1.1),разработка которого и является конечной задачей курсового проекта. Важным этапом проектирования при этом является обоснованный выбор закона управления. Законом управления называют математическую зависимость, в соответствии с которой УУ формирует управляющее воздействие иу. Применительно к системам управления по отклонению законы управления характеризуют зависимость uy=f(Δy), при этом uy может зависеть от самого отклонения Δy, от интегралов и производных от Δy. В общем случае  (7.1) (7.1)Где К1,…К5 – постоянные коэффициенты. Простейшим является пропорциональный закон управления, когда управляющее воздействие иу.(t) пропорционально самому отклонению  , т.е. когда в выражении (7.1) не равен нулю только коэффициент К1. Регуляторы (т.е. УУ), реализующие этот закон, называют пропорциональным (П-регуляторами). В ЭП в качестве П-регулятора обычно используют усилитель постоянного тока. Работа такого ЭП рассмотрена в разделе 1. , т.е. когда в выражении (7.1) не равен нулю только коэффициент К1. Регуляторы (т.е. УУ), реализующие этот закон, называют пропорциональным (П-регуляторами). В ЭП в качестве П-регулятора обычно используют усилитель постоянного тока. Работа такого ЭП рассмотрена в разделе 1.Закон управления, вытекающий из (1.6) и (1.5), выражается соотношением  (7.2) (7.2)Полная структурная схема САУ ЭП с П-регулятором получается добавлением к ОУ звеньев УУ в соответствии с соотношением (7.2) и замыканием через сумматор главной обратной связью выходной величины объекта  с задающим воздействием регулятора с задающим воздействием регулятора  Обобщенный вид такой схемы приведен на рисунке 7.1  Рисунок 7.1 – Обобщенная структурная схема САУ – ЭП с П-регулятором. На этой схеме блок «ТП-ДПТ-Р-Н» условно объединяет все звенья ЭП как объекта управления. При курсовом проектировании структурную схему ЭП с П-регулятором рекомендуется построить в двух вариантах. В первом варианте используется полная исходная (непреобразованная) структурная, схема «ТП-ДПТ-Р-Н» (потребуется при моделировании САУ ЭП). Во втором варианте блоку «ТП-ДПТ-Р-Н» должна соответствовать преобразованная схема, т. е. полная схема САУ ТП должна быть одноконтурной Полученная одноконтурная структурная схема позволяет провести анализ работы САУ ЭП в статических и динамических режимах. Известно, что в одноконтурной замкнутой системе передаточная функция по любому воздействию в точке «х» может быть определена на основании следующего соотношения:  (7.3) (7.3)В этом выражении  - передаточная функция прямой цепи по воздействию х, т.е. участке цепи от точки воздействия х до выхода у; - передаточная функция прямой цепи по воздействию х, т.е. участке цепи от точки воздействия х до выхода у;  - передаточная функция разомкнутой цепи, т.е. цепи, образованной из звеньев контура обратной связи (звеньев замкнутого контура), после размыкания этого контура в любом месте. - передаточная функция разомкнутой цепи, т.е. цепи, образованной из звеньев контура обратной связи (звеньев замкнутого контура), после размыкания этого контура в любом месте.По известной передаточной функции можно определить реакцию системы на воздействие  (7.4) (7.4)Если на систему действуют одновременно n внешних воздействий, то на основании принципа суперпозиции  (7.5) (7.5)Используя соотношение 7.3 для схем на рисунке 7.2. б можно получить передаточные функции замкнутой системы по любому внешнему воздействию. В частности, по задающему воздействию и по моменту нагрузки Мн.с. будем иметь: Уменьшить отклонение  можно увеличением коэффициента К, например, за счет увеличения коэффициента усиления Ку. Однако увеличение К может привести к потере устойчивости замкнутой системой. можно увеличением коэффициента К, например, за счет увеличения коэффициента усиления Ку. Однако увеличение К может привести к потере устойчивости замкнутой системой. Рисунок 7.2 – Структурные схемы САУ ЭП: а) непреобразованная многоконтурная; б) преобразованная одноконтурная. |