диплом. Рисунок 1 Кинематическая схема прессножниц комбинированных нг 5222
 Скачать 0.89 Mb. Скачать 0.89 Mb.
|

 ВВЕДЕНИЕ Пресс-ножницы предназначены для резки листа, резки сортового металла и пресса для пробивки отверстий. Все эти механизмы смонтированы на одной станине и имеют общий привод. Механизм управления ползуном сортовых и листовых ножниц рычажный, управление дыропробивным прессом рычажное или педальное. Основные параметры комбинированных пресс-ножниц регламентирует ГОСТ 7355 – 77. Толщина разрезаемых листов от 10 до 32 мм, диаметр отрезаемого круга от 36 до 75 мм, сторона квадрата от 32 до 65 мм, число ходов в минуту от 66 до 28. Резка на ножницах является самым экономичным способом разделки проката на заготовки. При резке важно (во избежание двойного среза), чтобы глубина внедрения ножей в металл не превышала V4 высоты разрезаемого сечения, особенно в случае резки высокопластичных металлов или заготовок, подогретых до высокой температуры. Чтобы предотвратить образование трещин на торцах (вследствие хрупкости некоторых сталей), прибегают к подогреву заготовок. Вхолодную режут углеродистые стали, содержащие до 0.5 % углерода. На качество реза влияет и скорость внедрения ножей в металл, для углеродистых сталей предпочтительнее повышенная скорость, а для легировочных сталей пониженная. В связи с этим новые конструкции ножниц рационально снабжать двухскоростными электродвигателями. 1. РАСЧЕТ ПАРАМЕТРОВ МЕХАНИЗМА Кинематическая схема пресс-ножниц представлена на рисунке 1.1. 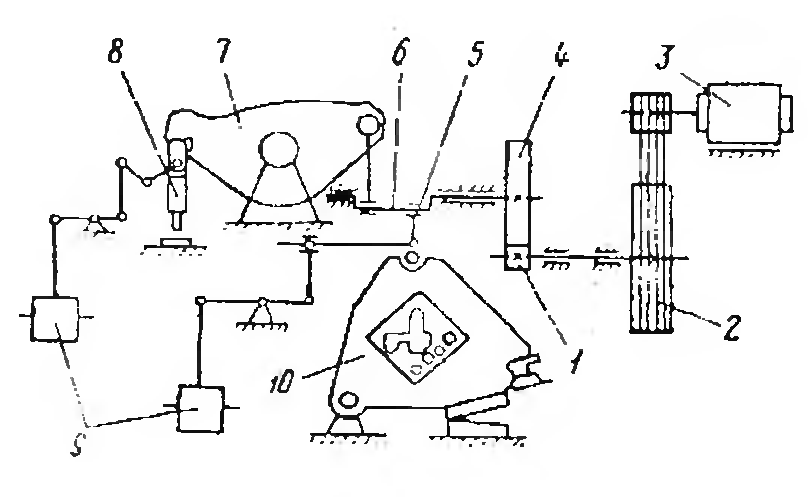 1 – вал-шестерня; 2 – маховик; 3 – электродвигатель; 4 – колесо зубчатое; 5 –шатун; 6–вал; 7 –балансир; 8–ползун пресса; 9–электромагнит; 10–ползун сортополосов секции Рисунок 1.1 – Кинематическая схема пресс-ножниц комбинированных НГ 5222 Привод пресс-ножниц осуществляется от электродвигателя 3 через клиноременную передачу, маховик 2 и одноступенчатую передачу 1, 4 к эксцентриковому валу 6. Зубчатая пара 1, 4 прямозубая, цилиндрическая. Движение на ползун 10 сортополосовой секции передается через балансир 7 и западающий камень. Включение и выключение исполнительных механизмов осуществляется через систему рычагов, связанных с одной стороны с шатуном и западающим камнем, а с другой стороны- с электромагнитами 9. Вал-шестерня: z1=14 – ширину обода 80 мм и изготовлено из стали 35Л ГОСТ977 – 88. Технические данные пресс-ножниц приведены в таблице 1.1. Таблица 1.1 – параметры пресс-ножниц комбинированных НГ 5222
Пресс – ножницы комбинированные (рисунок 1.1) предназначены для отрезки полосы, отрезки проката до 1000 мм по упору, отрезки уголка, круга, швеллера, двутавра; пробивки пазов треугольной и прямоугольной формы; пробивки отверстий круглой, прямоугольной, квадратной и любой другой формы. Все операции проводятся на одном и том же станке, что обеспечивает гибкую и экономичную обработку проката в крупном машиностроительном производстве, на строительных площадках, а также в любой ремонтной мастерской. Конструкция пресс–ножниц и множество вариантов дополнительной оснастки позволяют использовать пресс – ножницы для обработки проката различного профиля и разных параметров. 2 РАСЧЕТНАЯ ЧАСТЬ 2.1 Расчет параметров пресс-ножниц В таблице 2.1 приведены технические данные пресс – ножниц. Таблица 2.1–Технические данные пресс-ножниц
Для построения упрощённой нагрузочной диаграммы Mc=f(t) необходимо найти соотношение между углом α и линейным перемещением ножа. Угловая скорость кривошипа при установившемся движении для заданной скорости двигателя  . (2.1) . (2.1)Зададимся скоростью вращения двигателя nдв=500 об/мин, тогда  (2.2) (2.2)Средняя скорость кривошипа за полный его оборот  (2.3) (2.3)Тогда время работы кривошипа составит  (2.4) (2.4)Скорость перемещения ножа Перемещение ножа На рисунке 2.1 представлена зависимость скорости и перемещения ножа.  Рисунок 2.1 – Зависимости скорости vH, и перемещения ножа LH от времени Пользуясь графиком LH(t) определяем время перемещения ножа на расстояние h3–h=110-10=100 мм, t1=0.83 c. Время цикла  (2.7) (2.7)Время паузы  (2.8) (2.8)Относительная продолжительность включения  (2.9) (2.9) 2.2 Предварительный выбор электродвигателя по мощности Последовательность идентичных циклов работы, каждый из которых включает время работы при неизменной нагрузке, за которое машина не нагревается до установившейся температуры, и время стоянки, за которое машина не охлаждается до температуры окружающей среды.  (2.10) (2.10) где Ps1-номинальная мощность двигателя; К0 - отношение потерь холостого хода к потерям при нагрузке; ПВ - относительная продолжительность включения, %.ПВ=49.3%. Подставив значения в формулу получим  (2.11) (2.11) 2.3 Расчет выбранного электродвигателя и построение механической характеристики электропривода. Объектом управления является асинхронный электродвигатель с короткозамкнутым ротором типа АИР 100 L2, паспортные данные которого представлены ниже. Входные параметры Тип сети трехфазная 4-х проводная Номинальное входное напряжение, В 380 Частота входного напряжения, гц 50 Выходные параметры: Номинальная мощность, Квт 5.5 Номинальная частота вращения, об/мин 3000 Режим работы S3 cos φ 0.88 КПД, % 88 Iп, А 79,5 Iн, А 11  1.4 1.4 2.1 2.1 0.9 0.9Номинальное скольжение, % 1.2 Момент инерции ротора,  0.080 0.080 Построим естественную механическую характеристику (рисунок 2.2) электродвигателя М=f(S). Наиболее распространенным методом является построение механической характеристики асинхронного двигателя по пяти характерным точкам, определяющим рабочие режимы в следующих координатах: – пусковой режим М=  , S=1, (ω=0); , S=1, (ω=0);– критический режим  , S= , S= , ( , ( ); );– номинальный режим  , S= , S= , , ; ;– идеальный холостой ход S=0,  . .Для этого рассчитаем ряд значений – синхронная угловая скорость   – номинальная скорость  – минимальная скорость   – критическая скорость  где критическое скольжение  – номинальный момент  – критический момент  – пусковой момент  – минимальный момент  Механическая характеристика электродвигателя представлена на рисунке 2.2.  Рисунок 2.2 – Механическая характеристика электродвигателя 2.4 Проверка выбранного двигателя по нагреву При выборе асинхронного двигателя из двигателей серии АИР, предназначенных как для продолжительных, так и повторно-кратковременного режима, рекомендуется проверить его на нагрев. В этом случае используется метод средних потерь, которые определяются за время цикла нагружения по формуле  , (2.21) , (2.21)где ΔАП, ΔАТ – потери энергии при пуске, торможении; ΔРу·– потери мощности при установившейся частоте вращения; β0, βТ – коэффициент, характеризующий различные условия охлаждения при паузе и торможении (β0=0.25 – 0.35), принимаем β0=0.3; tп, tу, tт, t0 – время пуска, работы (установившегося режима), торможения и останова (паузы) соответственно. Коэффициент при пуске находится по следующей формуле  , (2.22) , (2.22) . (2.23) . (2.23) Коэффициент при номинальной нагрузке находят  , (2.24) , (2.24)где ω0 – угловая скорость идеального холостого хода  , (2.25) , (2.25) где f – частота сети, равная 50 Гц; р – число пар полюсов. ωн = ωмех = 310.2 рад/с,  рад/с, (2.26) рад/с, (2.26) (2.27) (2.27)Потери мощности при установившейся частоте вращения  Вт, (2.28) Вт, (2.28) где ηу – коэффициент полезного действия (КПД) электродвигателя при нагрузке, отличающийся от номинального; ηу = Ммин / Мн =15.75 / 17.5 =0.9, (2.29) ΔРн – потери за цикл, Вт  , (2.30) , (2.30)где ηдв – номинальный КПД электродвигателя.  Вт, (2.31) Вт, (2.31) Вт. (2.32) Вт. (2.32)Время цикла найдём по следующей формуле  , (2.33) , (2.33) где tц – время одного цикла, с; е – относительная продолжительность включения, %.  с, (2.34) с, (2.34)  , (2.35) , (2.35) с, (2.36) с, (2.36)  с, (2.37) с, (2.37) (2.38) (2.38)где Jp – момент инерции ротора, кг·м2; Jp = 0.008 кг·м2; Jмех = 0.006 кг·м2; i – передаточное отношение привода.  , (2.39) , (2.39)где ω2н – номинальная угловая скорость вращения ротора АД, рад/с,  рад/с , (2.40) рад/с , (2.40) рад/с, (2.41) рад/с, (2.41) (2.42) (2.42) кг·м2. (2.43) кг·м2. (2.43)Из следующего соотношения найдём пусковой момент  (2.44) (2.44)где Мн – номинальный момент двигателя, Н∙м  , (2.45) , (2.45) Н∙м, (2.46) Н∙м, (2.46)18.4 Н∙м > 17.5 Н∙м – условие выполняется. Мп = 2·Мн = 2∙18.4 = 36.8 Н·м. (2.47) Из следующего соотношения найдём минимальный момент сопротивления двигателя  (2.48) (2.48)Мmin = 1.6∙Мн = 1.6∙18.4 = 29.44 Н·м, (2.49)  с. (2.50) с. (2.50)Из следующего соотношения найдём тормозной момент Mт = 2.4∙Мн = 2.4∙18.4= 44.16 Н∙м , (2.51)  с, (2.52) с, (2.52) , с, (2.53) , с, (2.53) с, (2.54) с, (2.54) , (2.55) , (2.55) , (2.56) , (2.56) Н·м, 2.57) Н·м, 2.57) (2.58) (2.58) (2.59) (2.59) Вт. (2.60) Вт. (2.60)Если средние потери за цикл ΔРср не превышают номинальных ΔРн, то это указывает, что двигатель по нагреву выбран правильно. ΔРср < ΔРн , 454.77 Вт < 750 Вт. 2.5 Расчет и построение статических нагрузок Нагрузочная диаграмма электропривода учитывает статические и динамические нагрузки, преодолеваемые электроприводом в течение цикла работы механизма. Статическая нагрузочная диаграмма (рисунок 2.3) механизма представляет график функциональной зависимости  . Для периодического повторно-кратковременного режима работы (S3) с неизменной нагрузкой ( . Для периодического повторно-кратковременного режима работы (S3) с неизменной нагрузкой ( ) в общем случае график выглядит следующим образом ) в общем случае график выглядит следующим образом  Рисунок 2.3 – Упрощенная нагрузочная диаграмма механизма ножниц 2.6 Выбор преобразователя частоты фирмы Micromaster 440 Для расчета потребуются следующие величины. Pn – номинальная мощность двигателя (кВт); J – приведенный к валу двигателя момент инерции нагрузки (Нм). Если вал двигателя не связан с инерционными механизмами или двигатель работает на холостом ходу, то приведенный момент инерции равен моменту инерции ротора двигателя. n – частота вращения (об/мин), до которой нужно разогнать двигатель за время t. t – время (сек) в течении которого требуется разогнать двигатель до частоты вращения n. Un – значение напряжения (В) на обмотках двигателя на номинальных оборотах. k – коэффициент искажения тока, на выходе преобразователя. k=0.95…1.05. при расчетах предельных параметров лучше использовать максимальное значение коэффициента. η – коэффициент полезного действия (КПД) двигателя. cosφ – коэффициент мощности электродвигателя.
Номинальный момент на валу двигателя  Динамический момент на валу  Расчет пусковой мощности двигателя  На основании этой величины выбирается мощность преобразователя частоты, которая должна соответствовать условию  При этом ток, потребляемый двигатель при линейном разгоне – Id, не должен превышать пусковой ток преобразователя частоты.  Исходя из полученных данных, по каталогу выбираем подходящий преобразователь частоты. Micromaster 440 серии 6se6440-2ud31-5da1 был специально разработан для решения сложных функциональных задач с высокими требованиями к динамике. Система векторного управления преобразователя частоты SIEMENS MICROMASTER 440 обеспечивает высокое качество работы привода даже при резких изменениях нагрузки. С помощью быстрых входов и функции точного останова возможно точное позиционирование без использования энкодера. Благодаря интегрированному тормозному резистору, привод работает с высокой точностью даже во время торможения и в режимах резкого замедления скорости. Все это возможно в диапазоне мощностей от 0.12 кВт до 250 кВт. И главной особенностью преобразователя частоты MICROMASTER 440 является использование его при двух видах нагрузки, постоянной и переменной. Что позволяет использовать преобразователь меньшей мощности для управления электродвигателем большей мощности. Выбор коммутационный аппаратуры 2.3 Выбор дросселя Защитные дроссели защищают батерии статических конденсаторов от перегрузки токами высших гармоник. Вместе с емкостью конденсаторов они образуют резонансные контуры, ограничивающие амплитуды токов высших гармоник. Защитный дроссель защищает от появления резонансных контур, которые влияют на срок службы конденсаторов, отключение предохранителей и/или дефекты чувствительных приборов. Компенсационные дроссели являются индуктивной нагрузкой, которая устраняет нежелательную емкостную мощность, которая возникает на паразитных элементах разветвленных кабельных сетей, например длинные системы с неполной нагрузкой, ВН кабели с металлическим покрытием и т.п.  Рисунок 2.4 - Дроссель трехфазный сетевой EI-09996 Исходя из паспортных данных двигателя(Iн=11 A) выбираем трехфазный сетевой дроссель. Класс изоляции - B, провода – F. Конструкция - ферромагнитный сердечник с двойным воздушным пробелом. Обмотка и сердечник импрегрированные. Присоединение - зажимы RSA, с 20 кВАр плоские СU наконечники. Допуск - макс. 3% от номинального значения. Безопасность - биметаллический выключатель . Номинальное напряжение 380В, 50Гц. Коэффициент сглаживания 7%. 2.3 Выбор тормозного резистора Описание: micromaster 4 тормозной резистор 380-480 v 27r 24000 w pk 1200 w cont 515 x 270 x 175 mm в x ш x г ip20  Рисунок 2.5 – внешний вид тормозного резистора 2.4 Выбор плавкой низковольтной вставки фирмы Siemens Предохранитель Siemens 3NA, низковольтный, GL/GG c неизолированными выступами для монтажа/демонтажа, типоразмер 00, Iн=50A, Uн=380 В Предохранители NH получили очень широкое распространение благодаря своей универсальности. Они применяются в электроустановках административных и жилых зданий, на различных промышленных предприятиях и небольших производствах, а так же в системах энергосбережения и комплектных распределительных устройствах. Предохранители служат для защиты важных участков установок и сооружений. Предполагается, что обслуживание предохранителей NH производится только квалифицированными специалистами. В них не требуется конструктивных мер по защите в случае неправильного выбора номинала предохранителя и от прикосновения к токоведущим частям. В предохранителях NH для обеспечения безопасной замены и отключения электроустановок конструктивные элементы и вспомогательные средства выполнены соответствующим образом. 2.5 Выбор автоматического выключателя Siemens 3rv1042-4ka10
2.6 Выбор кнопок управления и сигнальной аппаратуры Кнопка нажимная, утапливаемая: –3SB36 011HA200CC0,2 А Кнопка грибовидная аварийного останова, освобожд. вытягиванием: –3SB36 020AA410CC0, AC/DC 24 В,2А Сигнальный индикаторYl1-105 лампа 7mm 24 3. ВЫБОР КОНТРОЛЛЕРА И ЕГО КОМПЛЕКТУЮЩИЕ 3.1 Выбор контроллера Выбираем контроллер Simatic S7-300 — программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Основные особенности контроллера: модульная конструкция, монтаж модулей на профильной шине (рельсе); естественное охлаждение; применение локального и распределенного ввода -вывода; возможности коммуникаций по сетям MPI, Profibus Industrial Еthernet/PROFInet, AS-i, BACnet, MODBUS TCP; поддержка на уровне операционной системы функций, обеспечивающих работу в реальном времени; поддержка на уровне операционной системы аппаратных прерываний; поддержка на уровне операционной системы обработки аппаратных и программных ошибок; свободное наращивание возможностей при модернизации системы; возможность использования распределенных структур ввода-вывода и простое включение в различные типы промышленных сетей. Из всего разнообразия микропроцессоров серии S7-300 выбираем CPU315–2DP, так как обладает рядом необходимых нам свойств, отличающих его от других контроллеров данной серии. Основным отличием является возможность поддержки интерфейс сети Profibus. CPU 315–2 DP отличаются следующими свойствами: может использоваться как Master-устройство DP (DP-Master) или как Slave-устройство DP (DP-Slave) 48 Кбайт рабочей памяти; 80 Кбайт встроенной загрузочной памяти RAM (может быть расширена с помощью платы памяти емкостью от 16 Кбайт до 512Кбайт, в CPU программируемы до 256 Кбайт; скорость: ок. 0,3 мс на 1000 двоичных команд; при смешанной централизованной и децентрализованной структуре в целом могут быть подключены до 1024 байт входов и 1024 байт выходов; как DP–Slave CPU конфигурируется в STEP 7, начиная с версии 3.1 или с помощью COM PROFIBUSначиная с версии 3.1. Характеристики мощности CPU 315–2 DP: рабочая память (встроенная) 48 Кбайт; загрузочная память; встроенная 80 Кбайт RAM; расширяемая до 512 Кбайт FEPROM (плата памяти); в CPU программируется до256 Кбайт; cкорость около 0,3 мс на 1000 двоичных команд; число меркеров – 2048; устанавливаемая от MB 0 до MB 255; предустановленная 16 меркерных байтов реманентны (от 0 Мб до Mб 15); количество счетчиков – 64; количество Таймеров – 128; тактовые меркеры 8 (1 меркерный байт); свободно выбираемый адрес меркерного байта (меркеры, которые могут быть использованы получения такта прикладной программе); локальные данные всего 1536 байт на класс приоритета 256 байт; глубина вложения 8 на класс приоритета; интерфейс DP; количество подключаемых Slave-устройства DP 64; cкорость передачи до 12 МБод; Память передачи (как DP-Slave) 122 байта выходов, конфигурируемы не более, чем в 32 адресных областях, макс. 32 байта на адресную область. Расстояние передачи данных зависит от скорости передачи. Конфигурация максимально 32 модуля на четырех носителях модулей. Технические данные: номинальное напряжение 24 В постоянного тока (-10 %/+15%); нотребление тока от 24 В (на холостом ходу) тип. 0,9 A; нок включения 8 A; внешняя защита питающих проводов (рекомендация) Выключатель с предохранителями; A, тип B или C; мощность потерь тип. 10 Вт; размеры Ш/В/Г (мм) 80/125/130; вес 0,53 кг (без платы памяти и буферной батареи или аккумулятора); время буферизации с буферной батареей мин. 1 год (при 25 °C и непрерывной буферизации CPU); время буферизации с аккумулятором для часов реального времени тип. 120 Ч; время зарядки аккумулятора тип. 1 ч; CPU 315–2 DP с помощью его второго интерфейса (PROFIBUS-DP) может использовать как DP-Master или как DP-Slave в сети PROFIBUS–DP. CPU 315-2 DP можете эксплуатировать как DP-Master не более, чем с 64 Slave-устройствами DP системы S7 или других систем. CPU 315-2 DP может подсоединяться как DP-Slave к Master-устройству DP системы S7 или к другому Master-устройству DP в соответствии со стандартом EN. В нашем случае используем режим DP-Slave, так как наш контроллер получает управляющие сигналы от контроллера. 3.2 Выбор модулей ввода вывода микроконтроллера Модули ввода дискретных сигналов предназначены для преобразования входных дискретных сигналов контроллера в его внутренние логические сигналы. К входам модулей могут подключаться контактные датчики или бесконтактные датчики BERO. Модули выпускаются в пластиковых корпусах. На их лицевых панелях расположены: - зеленые светодиоды, индицирующие состояние входных цепей; - красный светодиод индикации отказов и ошибок; - разъем для установки фронтального соединителя, закрытый защитной крышкой; - паз на защитной крышке для установки этикетки с маркировкой внешних цепей. 3.2.1 Аналоговый модуль ввода SM321 DI 32x24В Технические характеристики SM321 DI 32x24V (6ES7321-1BL00-0AA0): –габариты 40×125×117мм; –масса 0,26кг; –количество входов 32; –номинальное значение напряжения 24 V; –длина кабеля не более 600м; –потребляемая мощность 6,5 ВТ. 3.2.2 Дискретный модуль выхода SM321 DI 16×24B Технические характеристики SM321 DI 16x24V (6ES7321-1CH00-0AA0) : –габариты 40×125×117мм; –масса 0,26кг –количество входов 16; –номинальное значение напряжения 24 V; –длина кабеля не более 600м; –потребляемая мощность 1,5 ВТ. 3.3 Выбор источника питания системы управления Для подачи напряжения питания на контроллер принимаем к установке источник питания PS 307; 2 A, который имеет следующие отличительные характеристики: – выходной постоянный ток 2 [A]; –выходное напряжение 24 [В], защита от короткого замыкания и обрыва цепи; –подключение к однофазной системе переменного тока напряжением 120/230 [В], 50/60 [Гц]; –надежная изоляция в соответствии с EN 60 950. Номер заказа источника питания: 6ES7 307–1BA00–0AA0. Принимаем к установке процессор CPU 315-2 DP. Описание системы управления. Исходя из недостатков базовой системы и требованиям технического задания заменим систему управления с релейно-контакторной на микропроцессорную. Управление будет осуществляться через пульт оператора и кнопочную панель. Все операции управления механизмов пресс-ножниц осуществляется в ручном и автоматическом режимах. Ручной режим является вспомогательным режимом, а автоматический режим является основным. Выбор режима управления осуществляется оператором. Ручной режим предусматривается для проведения ремонтно-наладочных работ, опробования (ручного раздельного управления после завершения наладочных работ), ликвидации аварийных и нештатных ситуаций. В ручном режиме управления реализованы следующие функции: пуск и останов толкателя, пресс-крышки, подпрессовщика, прижима и ножниц; Для выполнения этих функций на пультах поста управления пресс-ножниц предусмотрен соответствующий набор органов управления, включая, избиратель режима управления. После того как системе управления будет подан сигнал на автоматическую работу и будет загружена партия металлолома, и исходя из начального состояния (опираясь на данные бесконтактных выключателей), система управления может полностью провести цикл резки металлолома. В случае нарушений технологического процесса, оператор имеет возможность вмешаться в работу и внести соответствующие коррективы. Аварийный останов выполняется в случае возникновения нештатных или аварийных ситуаций при работе установки пресс-ножниц, а также для предотвращения аварийных ситуаций, угрожающих безопасности обслуживающего персонала.Системой управления установкой предусмотрены:ключ-бирка, установленная на пульте управления - без перевода данного ключа в рабочее положение оператор не может выполнять управление стендом; защита цепей питания электрооборудования автоматическими выключателями; аварийный останов стенда с помощью кнопки «Аварийный стоп», установленной на пульте управления ; включение световой и звуковой сигнализации на пульте управления при возникновении аварийных ситуаций (реализуется через панель оператора); Управление установкой пресс-ножницУправление работой стенда осуществляется с пульта управления. На крышке пульта будут размещены следующие органы управления и индикации: световой индикатор белый, «Напряжение подано», указывает на то, что на пульт управления подано напряжение ;ключ-бирка, с фиксацией, на 2 положения, «Ключ – бирка», без перевода данного ключа в рабочее положение оператор не может выполнять управление стендом;кнопка нажимная, красная, «Аварийный стоп», служит для аварийного останова работы стенда;световой индикатор красный, «Авария», указывает на то, что при работе стенда произошла авария;звуковое сигнальное устройство, «Звуковой сигнал», подача звукового сигнала указывает на то, что при работе стенда произошла авария;кнопочные панели , служат для управления установкой пресс-ножниц;Расположение органов пульта на крышке пульта представлено на рисунке  Рисунок - Расположение органов управления на крышке пульта |