ким. откет ким. Роль ким в современной измерительной технике. Измерение прямых линий
 Скачать 1.33 Mb. Скачать 1.33 Mb.
|

1 2 Билет №1 Роль КИМ в современной измерительной технике. Измерение прямых линий. Измерение прямых линий. Различают: - минимально достаточный способ; - способ с использованием массива точек. Если известны координаты двух точек (рис...), то способами аналитической геометрии определяются длина линии и ее угол наклона . Это минимально необходимая информация, часто недостаточная для оценки точности. Например, для определения непрямолинейности прямой линии нужен массив точек. 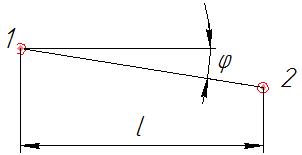 Рис…Измерение параметров прямой линии по двум точкам. 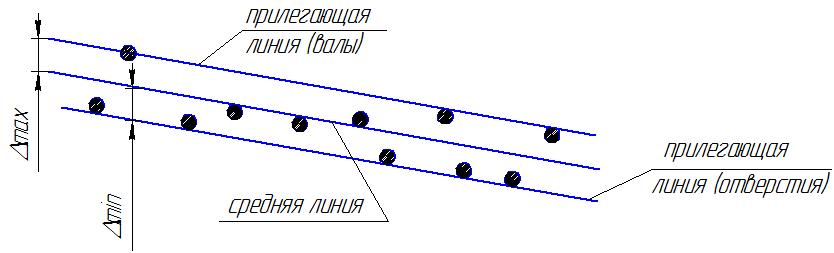 Рис…Контроль прямой линии с помощью массива точек. Число контролируемых точек назначает оператор, исходя из точности контроля. Обычно используется автоматическое измерение. Компьютер КИМ при специальной команде выполняет обработку результатов. Вначале определяется средняя линия с использованием метода наименьших квадратов. Прилегающие линии проводится через точки наиболее удаленные по величине ∆ от средней линии, в нашем случае выше ее для поверхностей деталей относящимся к валам и ниже для отверстий, т.е. в сторону сопряженной детали, которая контактирует с измеряемой. С использованием этих линий решаются задачи по определению степени прилегания двух контактирующих прямых линий (рис...). Обычно степень прилегания контролируют по краске, напросвет с помощью специальных устройств. Это очень трудоемкие способы, в отличие от них КИМ может рассчитать прогноз степени прилегания, используя информацию., полученную при измерениях этих прямых с помощью массивов точек. Возможные три ситуации, показанные на рисунке : а) средние линии прилегающих линий совпадают или параллельны друг другу. Это означает, что базирование этих линий друг относительно друга выполнено правильно. б) средние линии пересекаются с левой стороны; в) средние линии пересекаются с правой стороны 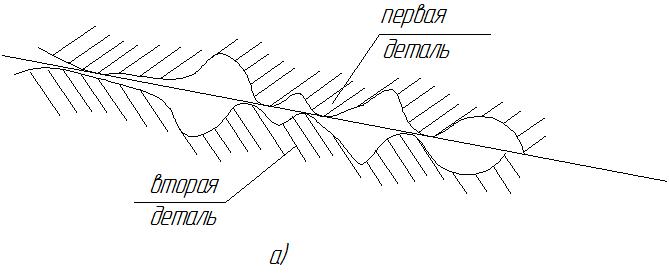 . 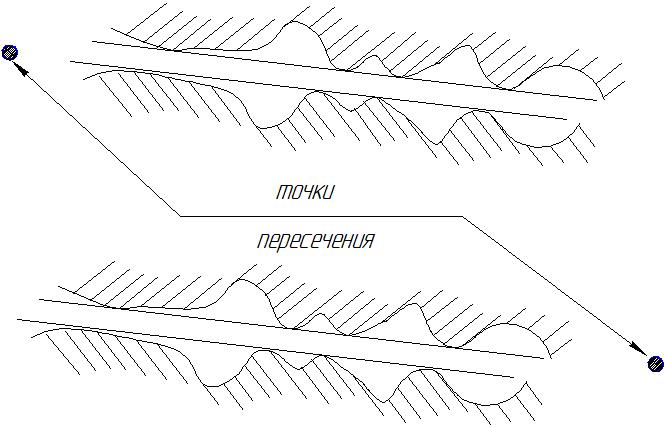 Рис….Возможные варианты взаимного расположения сопрягаемых прямых. В случаях б и в взаимное базирование деталей выполнено неправильно. Вначале необходимо устранить ошибки в изготовлении измерительных баз поскольку иначе картина прилегания будет некорректной. Тем не менее полученная информация является очень полезной. В рассмотренных случаях КИМ практически итспользует модели линий и определяет степень их взаимного прилегания. Все чаще конструкторы и технологи требуют от контролеров информацию о топографии поверхностей и линий. Поскольку только координатные измерения массивов точек могут дать информацию о погрешностях формы, роль КИМ постоянно возрастает. Технология, когда опытные мастера обеспечивали точность сборки за счет использования пригонки, ушла в прошлое, в настоящее время только разумное сочетание станков с ЧПУ при изготовлении деталей и КИМ при контроле позволяет без пригонки обеспечить нужную точность. Практика показывает, что при повышении точности на один квалитет, например, с 8Н до 7Н затраты на производство возрастают примерно в 10 раз. При использовании квалитетов ниже шестого точность деталей без использования КИМ обеспечить практически невозможно. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №2 Объясните, почему КИМ считается мехатронной системой? Контроль параметров окружности. Контроль параметров окружностей Окружности, цилиндрические и конические поверхности широко используются при конструировании деталей. Во всех случаях окружность является основным контролируемым элементом. Различают: - минимально достаточный способ; - способ с использованием массива точек. Второй способ более точный, первый менее точный, но очень простой (рис...). 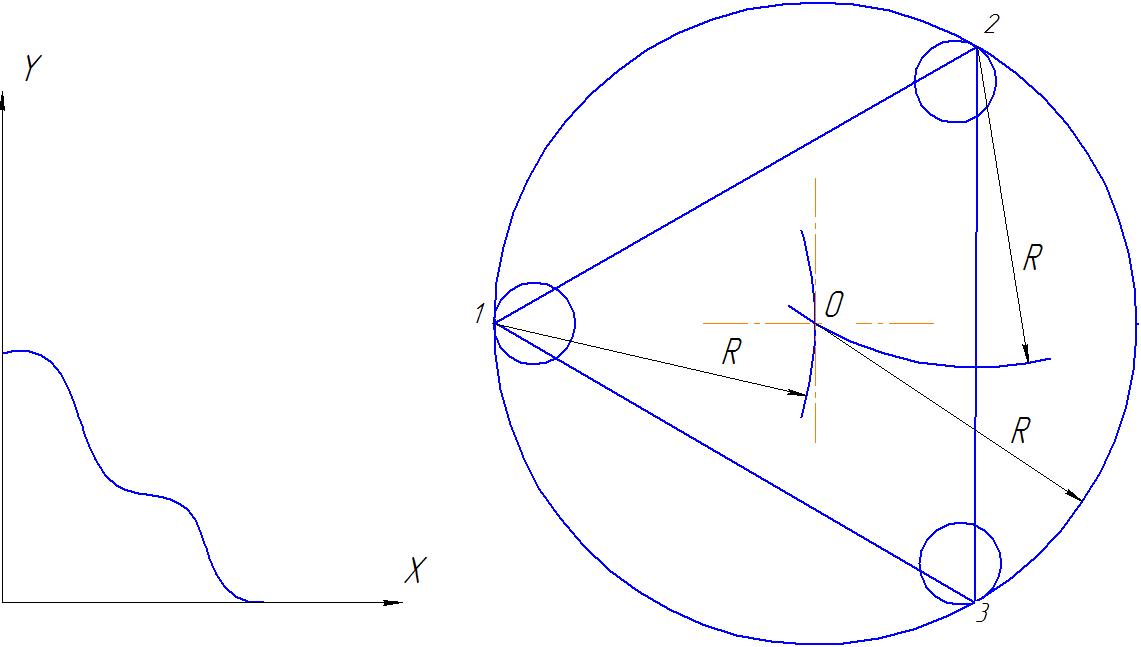 Рис…..Контроль окружности трем точкам. Известны координаты минимально трех точек. Необходимо найти координаты центра О. В начале определим с использованием правил геометрии радиус окружности R, а затем из 1 и 2 проводим две окружности с радиусом R, их пересечение и есть центр окружности. Математически задача давно решена, поэтому реальные формулы не приводятся. Нужно стремиться, чтобы площадь треугольника 1-2-3 была возможно больше. Это повышает точность измерения. Результатом контроля являются координаты центра окружности и ее радиус. Очень часто этой информации недостаточно. 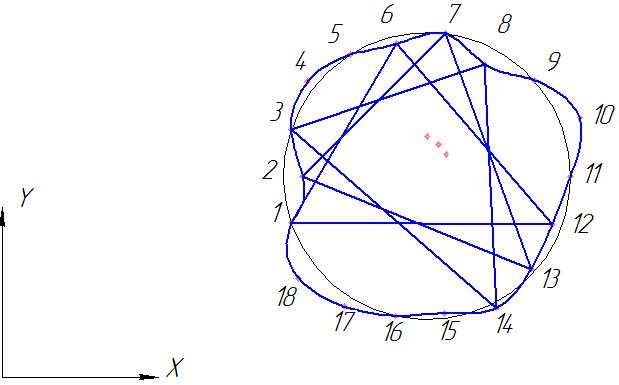 Рис….Контроль окружности с помощью массива точек. По трем точкам радиус окружности точно определить нельзя, поскольку всегда имеются погрешности формы. Для повышения точности обычно используется массив точек, кратный 3. Первый раз центр определяем по точкам 1, 6, 12, второй раз по точкам 2, 7, 13, третий по точкам 3, 8, и 14 и так в нашем примере 6 раз. Образуется массив точек положения центра окружности. Один из способов расчета наиболее вероятного центра использует правило определения средней величины. Нет формул 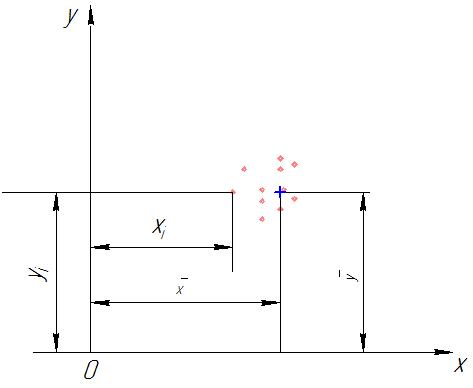 Рис……Определение координат центра окружности с помощью массива точк. Обычно используют большое число точек n ≥ 30, а средние значения заменяют на математическое ожидание. Такие способы точнее, они позволяют далее определить некруглость окружности, а если использовать первый способ определения координат центра, некруглость измерить нельзя. :В конечном итоге можно теоретически решить задачу прилегания вала и окружности, что очень важно при изготовлении точных механизмов. Например прилегание конических отверстий и валов очень важно при изготовлении кранов, шпинделей станков и базирующихся по ним оправок. На рисунке ... показаны результаты контроля на прилегание. Зоны взаимного контакта заретушированы. Результатом контроля является процентное выражение площади прилегания к общей площади сопрягаемых поверхностей, например, конструктор допускает 70%, а КИМ проверяет это требование. 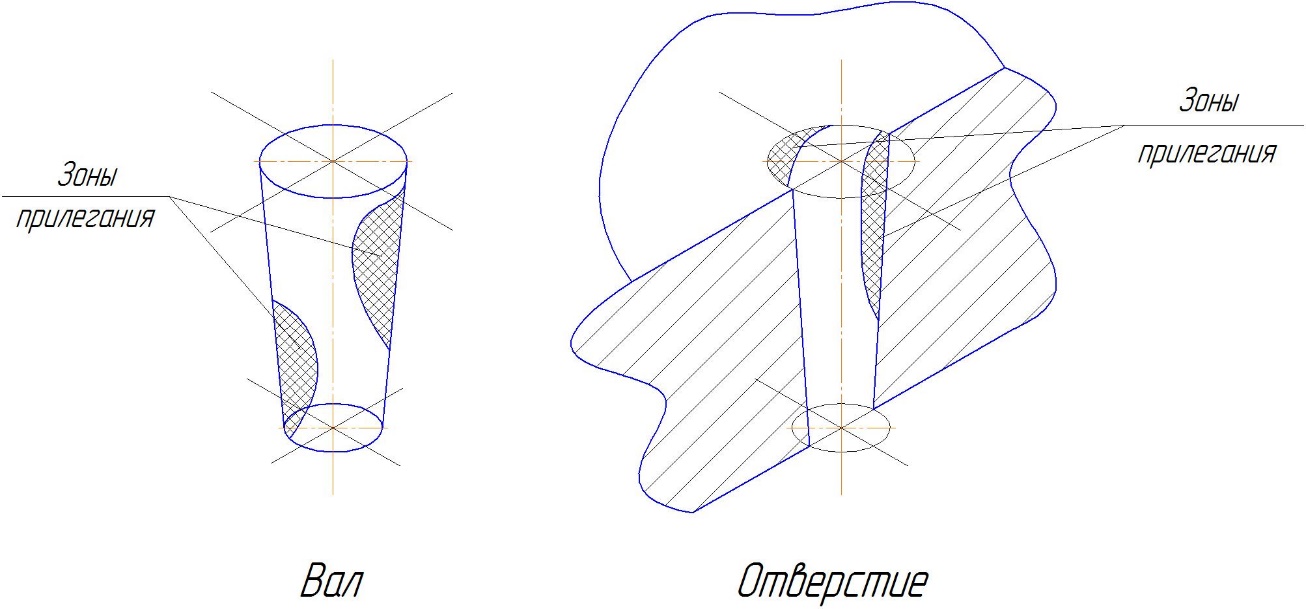 Рис…..Зоны прилегания сопрягаемых вала и окружности. Здесь, (рис...) вначале необходимо оценить взаимное базирование деталей, которое может мешать правильному сопряжению. Устранив погрешности базирования можно с помощью КИМ степень взаимного прилегания этих поверхностей. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №3 Поясните принцип работы КИМ. Как используется индуктосин? Определение координат окружности. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №4 Устройство нулевой измерительной головки и принцип её работы. Определение параметров плоскостей. Параметры U, V и K. Определение параметров плоскостей Плоскости наиболее часто используются в чертежах деталей. Кроме того они определяют систему координат измеряемых деталей, поэтому их контроль очень важен. Как и ранее используются два способа: - минимально достаточный; - с помощью массива точек. В первом случае параметры плоскости определяются по трем точкам. Эти точки составляют базовый треугольник (рис...) и его габариты должны быть как можно больше. Для определения уравнения плоскостей используются зависимости аналитической геометрии в специальных программах, имеющихся в библиотеке КИМ. 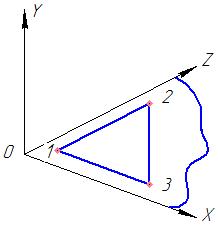 Рис. Определение положения плоскости по трем точкам. Второй способ выполняется сканированием плоскости с заданными шагами tx, ty, tz. Плоскости задаются векторами  , ,  , ,  а также числом и величиной шагов в направлении каждого вектора. Принято следующее обозначение векторов: - ось ОХд; - ось Оуд; - ось Оzд. а также числом и величиной шагов в направлении каждого вектора. Принято следующее обозначение векторов: - ось ОХд; - ось Оуд; - ось Оzд.Запись Q →(V=3, U=5), t=10 означает плоскость ХдОУд на которой по оси Хд необходимо иметь три шага tх, а по оси Уд – пять шагов tу (рис…). Сканирование выполняется в автоматическом режиме. Курсор выводиться на начальную точку, далее контроль соответствует рисунку…. 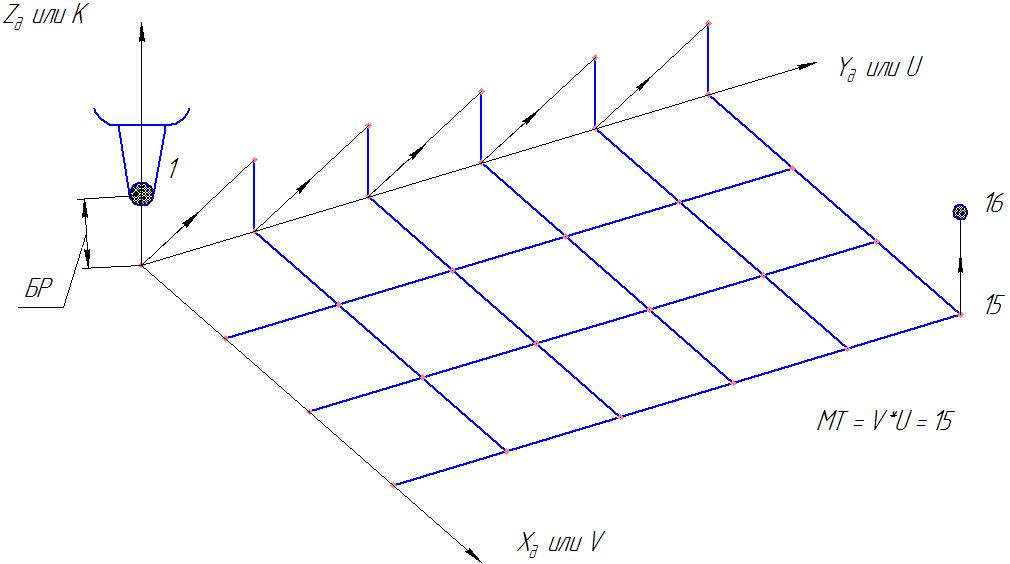 Рис…….Сканирование плоскости в автоматическом режиме. БР-безопасное расстояние, необходимое для работы измерительной головки. Контроль плоскости может выполняться по схеме прямоугольника (рис...) и по схеме треугольника (рис...), координатные стороны которого также задаются векторами , , с заданным числом шагов.Схема контроля плоскости ZдОУд показана на рисунке.... 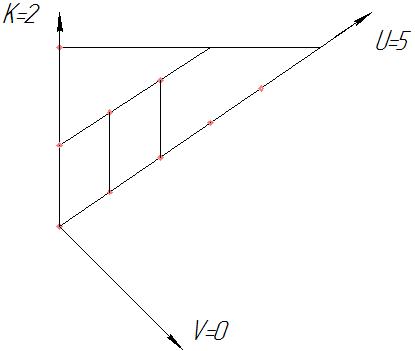 Рис….Контроль вертикальной плоскости в виде треугольника. "Умная" КИМ не будет контролировать точки, находящиеся вне площади треугольника. При контроле плоскостей используется понятие безопасного расстояния (БР) (рис...), - на эту величину отходит щуп от контролируемой плоскости и совершает пилообразную траекторию. По результатам контроля контактирующих между собой поверхностей составляется карта их прилегания. 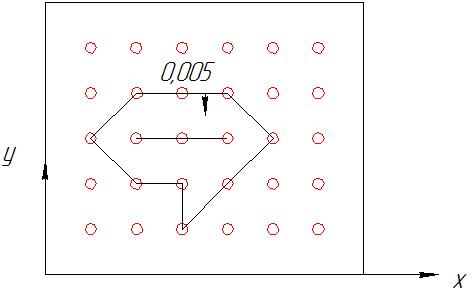 Рис….Топография плоскости по результатам измерений. Точки, параметры которых не укладываются в поле допуска (рис...) окрашиваются в красный цвет. Степень отклонения может также поясняться цветом. Сравнив топографию прилегания можно сделать заключение о его пригодности. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №5 Как выполняется калибровка щупов? Правила выбора щупов. Калибровка щупа. Щуп является той частью измерительной системы, которая соприкасается с деталью и обеспечивает выполнение измерения. Контролируемый элемент определяет тип и размер используемого щупа. Во всех случаях максимальная жёсткость щупа и сферичность наконечника являются наиболее важными факторами. Калибровка щупа - процедура, в ходе которой измерительный процессор определяет радиус наконечника щупа и его положение относительно нулевых меток линеек КИМ или другой точки отсчета путем тарирования калибровочной сферы или кольца. Положение отдельных щупов с шариками и диаметры шариков определяются с использованием специальной программы калибровки датчиков. Поочередно выполняется касание щупа с датчиком контрольных точек. Эталонная деталь обычно представляет собой шарик с известным диаметром, изготовленный с исключительно высокой точностью. Точные размеры калибруемого шарика заносятся в программу для измерений. Если предполагается использовать щуп для измерения в нескольких отдельных точках, то калибровка щупа выполняется в 5-6 точках в верхней части калибровочного шарика. Калибровка щупа происходит следующим образом: Установить на измерительный стол тарировочную сферу (рисунок 11). На панели инструментов выбираем кнопку «калибровка». В сетке положения щупов выбираем положение датчика подлежащие калибровки и нажимаем кнопку «автоматическая калибровка». В открывшемся окне нажимаем кнопку «начать калибровку». В открывшемся окне вводим размеры удлинения щупа и нажимаем «старт». В открывшемся окне подтверждаем начало калибровки. Р  ис. 11. - Установка на измерительный стол тарировочной сферы. Формирование бланка отчета с изображение откалиброванных положений датчика. К  алибровка завершена. Рис. 12. - Блок сменных щупов. После каждой смены датчика касания проводится калибровка. Определение параметров произвольных поверхностей. Определение параметров произвольных поверхностей. Все чаще, особенно в предметах широкого потребления, вместо простых форм используются более сложные. Например, прямоугольные формы (рис...) заменяются на фасонные. 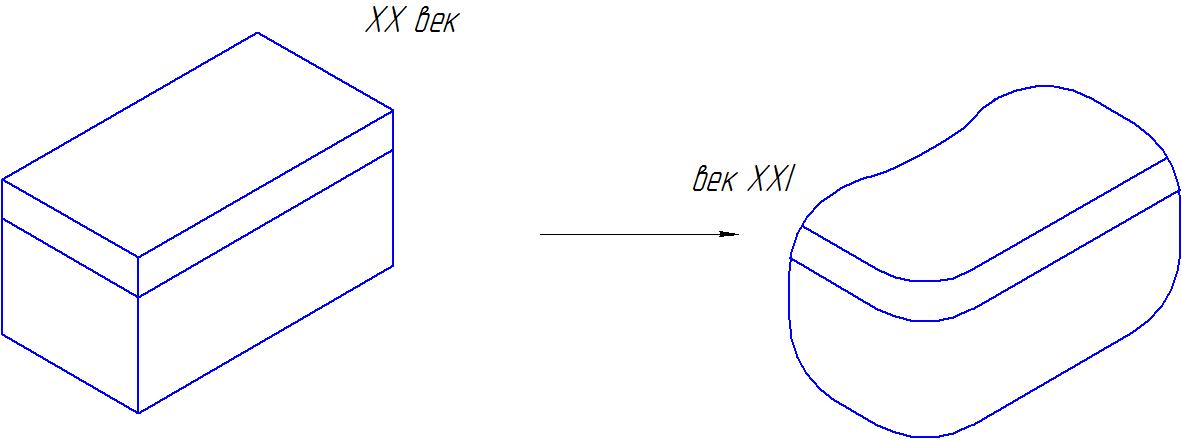 Например, коробка для сапожной щетки изменилась, как показано на рисунке. Закрывается коробка даже с поворотом крышки на 180° лучше чем старая. Здесь точность обеспечивается за счет точности литейных форм, но они металлические и должны тоже правильно прилегать друг к другу. Примеры по решению задач на прилегание можно расширить это: -контроль автомобильных дверей; - крышек емкостей для жидкостей; - пластиковыых оконныех рам; - подвижных частей механизмов и, особенно стрелкового оружия, и т.п. Во всех случаях КИМ не только выполняет контроль сопряжения поверхностей, но и требует от конструкторов новых решений по нормированию их точности. Эта задача в настоящее время решена только частично. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №6 Дифференциальные измерительные головки, их недостатки и преимущества. Измерение и просмотр погрешностей формы. Измерение и просмотр отклонений формы. Устройство для просмотра отклонений формы позволяет отображать отклонение формы для проверенных объектов. INCA3D отображает вычисленный объект, список проверенных точек, отклонение для каждой проверенной точки, гистограмму со статистикой. Гистограмма содержит распределение проверенных точек объекта, соответствующих допуску отклонения формы (некруглость, неплоскостность, непрямолинейность, нецилиндричность). Если любой допуск отклонения формы соответствует проверенному объекту, то INCA3D вычисляет только результаты минимальных и максимальных отклонений. Эта функция доступна для линий, плоскостей, окружностей, прямоугольников, круглых отверстий, цилиндров, конусов и сфер. При измерениях указывают один из приведенных символов и условные обозначения рис..., расшифровка которых приведена на рисунке.... 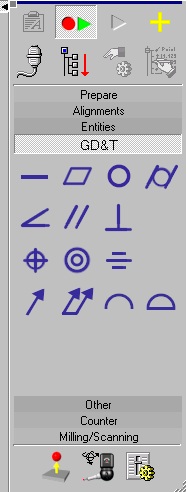  Рис…Общая панель отклонений формы и условные обозначения измеряемых погрешностей 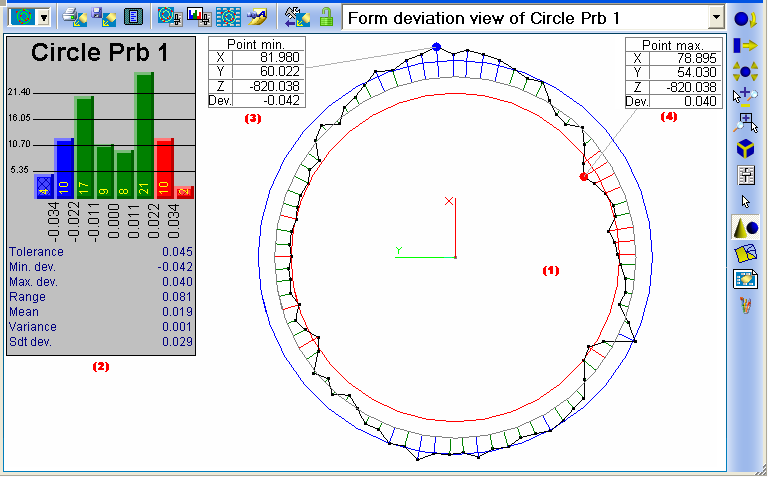 Рис…..Контроль некруглости при контроле окружностейю INCA3D показывает вид отклонения формы (1) проверенной окружности и статистические результаты гистограммы (2), вычисленные в соответствии с допуском отклонения формы. Она также отображает 2 символа (3) (4), соответствующие точкам с минимальными и максимальными отклонениями. 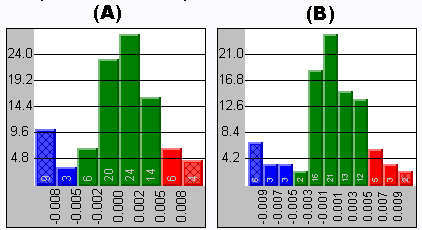 Рис….Гистограммы,отражающие результаты контроля окружностей. … Пример(А). Имеется 12 (9+3) проверенных точек меньше нижнего допускаемого отклонения и 10 (6+4) проверенных точек большего верхнего допускаемого отклонения. Пунктирные столбцы представляют проверенные точки вне выбранных диапазонов (меньше 0,008 и больше 0,008). Диапазон допуска: Tolerance/4. Пример (В). На этом примере используется 5 столбцов в пределе допуска и 2 столбца вне пределов допуска. Имеется 12 проверенных точек меньше нижнего допускаемого отклонения и 10 проверенных точек выше верхнего допускаемого отклонения. Диапазон допуска: Tolerance/4. Вычисленный диапазон допуска является меньше предыдущего. В режиме увеличения результаты контроля двух крайних точек показаны на рисунке.... 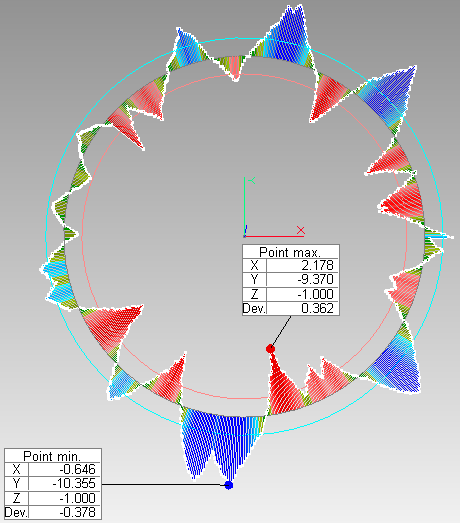 Рис…Результаты контроля окружности. Рисунок позволяет заключить, что, экстремальные точки находятся рядом друг с другом. Такое расположение точек ,как правило, является следствием скачка усилий резания при обработке вала, например, при фрезеровании, когда припуск после одного оборота заготовки резко уменьшается. Вообще, круглограммы, сопровождаемые гистограммами являются мощным инструментом анализа операций формообразования. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №7 Задачи базирования и выравнивания при эксплуатации КИМ. Контроль округлости на КИМ и форма регистрации результатов. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №8 Выравнивание деталей по одной точке. Контроль прямолинейности на КИМ и форма представления результатов. Контроль прямолинейности. Используется при контроле прямых линий и плоскостей. Пример контроля с построением гистограммы приведен на рисунке.... Приведенные результаты по своей форме одинаковы при контроле всех отклонений формы. 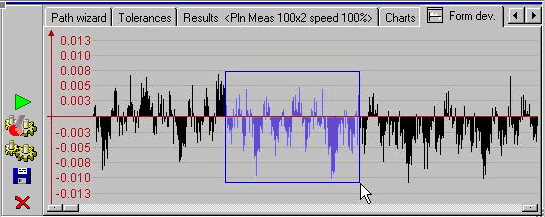 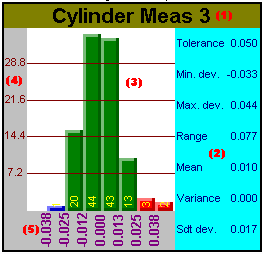 Рис…..Результаты контроля прямолинейности. 1-надпись о исследуемом объекте 2-основные измеренные параметры 3-графическая часть (гистограмма) 4-шкала в процентах % 5-интервалы гистограммы. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №9 Выравнивание деталей по двум точкам. Погрешности измерения при контроле на КИМ. Составляющие погрешности измерения на координатно-измерительных машинах. На погрешность измерения при использовании КИМ влияют следующие погрешности: - от механической части - ∆1; - от измерительных (отсчетных) систем - ∆2; - от контактирования щупа с поверхностью измеряемой детали - ∆3; - от воздействия окружающей среды - ∆4; - методические погрешности - ∆5. Погрешности от механической части машины связаны с тем, что перемещение по координатным осям осуществляется в действительности не по прямым линиям и не перпендикулярно друг другу. Эта погрешность зависит от точности изготовления направляющих, от точности монтажа, трения в направляющих, наличия люфтов, прогиба под действием собственного веса подвижных частей, инерционности движущихся масс и некоторых других причин. Погрешность эта носит как систематический так и случайных характер. Погрешность от измерительных систем. Эта погрешность зависит от погрешности используемых масштабов (шкал), от преобразования для получения дискретных более мелких значений, чем на шкале, с помощью дополнительных устройств, от параллельности расположения отсчетных систем относительно координатных осей (например, от нарушения принципа Аббе). Погрешности, зависящие от измерительных систем, являются в основном систематическими и в значительной мере компенсируются введением соответствующих поправок с помощью ЭВМ. Погрешности, связанные с контактированием щупа вызываются износом и нестабильностью измерительного усилия. Износ минимизируется использованием корундовых сферических наконечников а вариация измерительных усилий снижается за счет конструкции измерительных головок. Воздействие окружающей среды минимизируется использованием т.н. термоконстантных помещений, нормированием влажности и использованием виброопор для установки самой КИМ. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №10 Выравнивание деталей по трём плоскостям. Методическая погрешность при использовании КИМ. Методическая погрешность измерения. Этот вид погрешности связан с тем, что на КИМ измеряются координаты положения отдельных точек в пространстве. Вполне естественно, что измерить все точки на поверхности измеряемого элемента невозможно, а, следовательно, всегда возможно положение, при котором предельные выступающие точки этой поверхности не будут измерены. Как говорилось ранее, для определения диаметра идеальной окружности достаточно определить положение трех точек. На реальной окружности всегда будет отклонение формы, т. е. отклонение от круглости. Можно также говорить о влиянии отклонений формы на погрешность измерения. Следовательно, под методической погрешностью, а более точно, под методической составляющей погрешности измерения понимают погрешность, связанную с используемой методикой измерения, в результате которой не выявляется размер «действующий» при сборке измеренного элемента. В связи с этим при измерении предусмотрена возможность измерять большое число точек на одной поверхности. Другая часть методической погрешности связана с алгоритмом обработки результатов измерения координат точек, расположенных на реальной поверхности, т.е. имеющей отклонения формы. После измерения большого числа точек во всех КИМ рассчитывается средний размер измеряемого элемента (средний диаметр окружиности, средний диаметр цилиндра, средняя прямая и т. д.). Однако при нормировании точности геометрических параметров, относящихся к размерам, отклонениям форм и расположения, за основу принимается так называемая прилегающая поверхность Так, за наибольший размер вала должен приниматься размер идеального цилиндра который проходит через выступающие точки реального цилиндра (прилегающий или описанный цилиндр). При расчетах результатов измерения на КИМ определяются размеры и положения не прилегающих, а средних поверхностей. В общем случае оси прилегающих цилиндров и средних цилиндров не совпадают, а, следовательно, в результаты математической обработки войдет методическая ошибка, в данном случае из-за использования алгоритма, по которому ведется расчет. Расчет средних поверхностей вместо прилегающих, (его часто называют методом наименьших квадратов), объясняется тем, что это расчет более простой и занимает меньше машинного времени Необходимо отметить, что методическая погрешность измерения имеет место и при других видах измерений. Например, при измерении диаметра вала с помощью микрометра тоже не находят диаметр прилегающего цилиндра для определения наибольшего диаметра. Но при этих измерениях оператор не связан измерением ограниченного числа точек, а производит некоторое число измерений, направленного на то, чтобы выявить предельные размеры. При этом последовательность измерений и число измеренных сечений может быть разным для одинаковых деталей. Но для КИМ, где методика измерений в большинстве случаев запрограммирована, а процесс измерения относится только к отдельным точкам, методическая составляющая погрешности измерения является специфичной и часто доминирующей погрешностью. ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ №11 Выравнивание деталей по плоскости, линии и точке. Элементная проверка КИМ с помощью интерферометра. 1 2 |