 
Принимаем для механизма передвижения два приводныхунифицированных агрегата типа ПК с двигателем МТКН 211-6мощностью5,6кВтприПВ60%, n=920об/мин.Максимальныймоментдвигателя226Н·м.
Общаямощностьмеханизмпередвижениясоставит5,6х 2=11,2
кВт.
Определяемскоростьпередвижениякранасунифицированнойтележкойидвигателем
Vкр=πDхкnэ/60ic=3.14·0.5·920/60·75.6=0.318м/с.
Превышение фактической скорости над заданной Vкр = 0,3 м/с непревышает6%.
Номинальныймоменткаждогоэлектродвигателя
Мн=9550Nэ/nэ= 9550·5,6/920=58,13Н·м.
Среднийпусковоймоменткаждогодвигателя
Мcn=2.5Мн=2,5·58,13=145Н·м.
Проверяемвремяразгонакранаприпускемеханизмовпередвижения.
(𝑄кр+𝑄гр)𝐷2 2
𝑛дв[1,2𝐽𝑝+ 2 хк] 920[1,2·0,11 (753200+39200)0,5 ]
4·𝑖𝑝·𝜂тр + 4 ·75,62·0,95
tp= = =5,27с.
9,55[М − ∑𝑊·𝐷хк] 9,55[2·145−34750·0,5]
𝑐𝑛 2𝑖тр𝜂тр 2·75,6·0,95
Времяразгонаприпускемеханизмапередвижениянаходитсявдопустимыхпределах.Ускорениеaприэтомсоставит.
а=Vкр/tp=0.3/5.27=0.057м/с2<[0,15м/с2]
2.4.Проверкаходовыхколёсна контактнуюпрочность
Действующиеконтактныенапряженияприкаченииколесапорельсувычисляем поформуле:


σ=7500·К·К3 𝐾д·𝐹𝑐 = 7500·0,119·1,13 1,06·501/2 =462МПа,
f √ 𝐷2 √ 502
𝑥𝑘
гдеК=0,119приотношениирадиусаR головкирельсаKP120кдиаметруколесаDхкпри R/D=1;
Kf = 1.1 – учитывает касательную нагрузку для строительныхкранов,работающихнаоткрытыхплощадках;
Kд=1+аVкр=1,06–учитываетдинамикуижесткостькрановогопути,уложенногонажелезобетонныхбалках.
| |
|
|
|
|
|
Расчет механизма передвижениякрана
|
Лист
|
|
|
|
|
|
29
| |
Изм.
|
Лист
|
№ докум.
|
Подпись
|
Дата
|

Приведенныедопускаемыенапряжениязанормативныйсрокслужбыопределяемпоформуле:

[σ]=[σ]9 1000 9 10000
N 0√ = 920 √ =583МПа>478Мпа.
𝑁𝑛 596582
2.5.Определениенагрузкииразмеровваловходовыхколёс
Конструкцию установки приводного ходового колеса принимаем порис1.8всоответствиискинематическойсхемойнарис1.41.Эскизвалаколесапоказаннарис2.2.
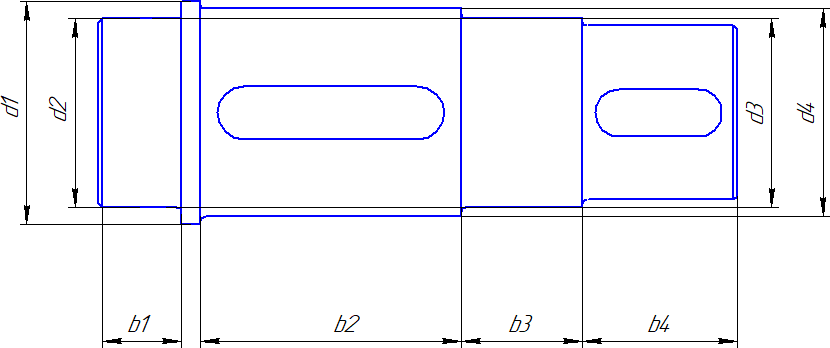
Рис2.2Эскизвалаходовогоколеса
Размеры вала выбирались в соответствии с размерамистандартных колёс по ГОСТ 3569. Размер d4 = 110 мм принимаем поразмеру отверстия выбранного ходового колеса. Диаметр бортикапринимаем d1= d4 + 8 = 118 мм, а его длину - 16 мм. Длину b2= 138 мм валапринимаем на 4 короче, чем ширину ступицы колеса. Диаметры d2 должныбыть меньше d4на 3-4 мм, быть кратным 5 и обеспечить посадку k7роликовыхсферическихподшипников.ПринагрузкенаходовуютележкуFc= 501 кН на каждый подшипник колеса воспринимает статическуюнагрузку Rп= Fc / 4 = 501/4 ≈ 125 кН.Выбираем сферические роликовыеподшипники№3520.РазмерыподшипникаdхDхB= 100x180x46.
Подшипникимеетдопустимуюстатическуюнагрузку184кН,
динамическуюнагрузку184,динамическуюнагрузку–216кН.Размерваладля посадки подшипника d2= 100. Длину b1принимаем b1= B – 2 мм = 46 –2 = 44 мм; b3= B +18 = 46 + 18 = 64 мм. Длину шлицевой части вала b4cполнымпрофилемшлицовпринимаемb4≈ d3= 100мм.
Кинематическую связь ходовых колёс тележки с приводнымагрегатомосуществляемзубчатойшестернейсколичествомзубьевzIII
| |
|
|
|
|
|
Расчет механизма передвижениякрана
|
Лист
|
|
|
|
|
|
30
| |
Изм.
|
Лист
|
№ докум.
|
Подпись
|
Дата
|
= 19. При передаточном числе открытой зубчатой передачи Iоп= 2,52.Число зубьевколесаzk=zIII·iоп=19·2,52=48.Принимаемпредварительномодуль зубьев mon = 10 мм по аналогии с серийными зубчатыми колёсамиприводных ходовых тележек. Диаметр начальной окружности шестернибудет dIII = zIII · mon= 19 · 10 = 190 мм. Диаметр начальной окружностизубчатогоколеса dk=zk·mon=48· 10=480мм.
Величину окружности силы Fo, действующей в зацеплениишестернисколесом,принимаемизусловиядействияноминальногомоментадвигателя
Fo= 2Мнio/dIII=2·58·75.6/0.19=44564H=44.46кН.
Максимальнаяокружнаясилараспределяетсянадваколеса
Fom=Fo/2=44.46/2=22.28кН.
Возникающиевзубчатомзацеплениирадиальныесилывычисляемпоформуле
Fp= Fo·tga=22.28·0.364=8.1кН,
Гдеа= 20°-уголзацепления.
Дляисключенияизгибающих валшестернисил,возникающихвзацеплении,осиколёсвшестерниразмещаемнаоднойпрямой
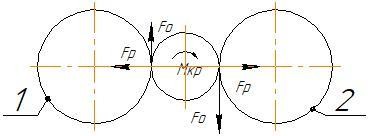
Рис 2.3. Схема действия сил открытой зубчатой передачиОпределение расчетных размеров плеч сил, действующих в
разработанной конструкции ходовой тележки, принимаем согласночертежу(рис.2.4).
| |
|
|
|
|
|
Расчет механизма передвижениякрана
|
Лист
|
|
|
|
|
|
31
| |
Изм.
|
Лист
|
№ докум.
|
Подпись
|
Дата
|
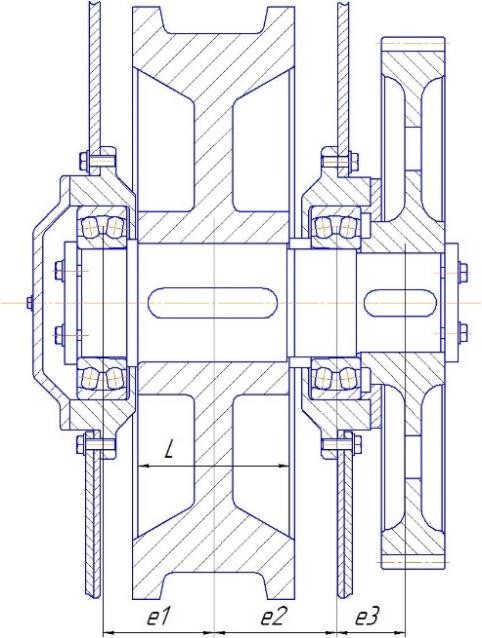
Рис.2.4.Сборочныйчертежходовогоколеса
Расчетная схема действия сил на валы 1 и 2 колес ходовой тележкипридвижениивлевопоказананарис.2.5.
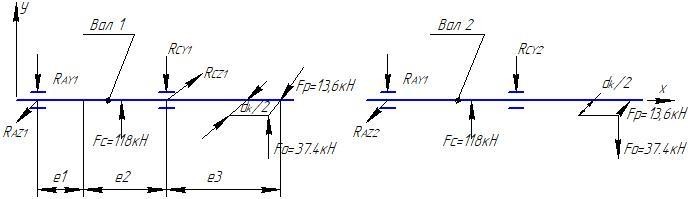
Рис2.5.СхемадействиясилнавалыходовыхколеспридвижениивлевоПлечиприложениядействующихнавалысилопределяемпо
следующимвыражениям
e1=(В+ L)/2+17мм= (46+140)/2+ 17= 110мм;e2=(L+B)/2= (140+46)/2=93мм;
e3= (B+b4)/2+ 17мм= (46+ 100)/2+17= 90мм.
ИзуравнениямоментовсилотносительноточкиАввертикальнойплоскостиХ–У находимреакцииRCY1иRCY2
RCY1=[Fce1+Fo(e1+e2+ e3)]/(e1+ e2)=[501·0.11+22.28(0.11+0.093+0.09)]/(0.11+0.093)=308кН.
RCY2=[Fce1-Fo(e1+e2+e3)]/(e1+e2)=[501·0.11+22.28(0.11+0.093+0.09)]/(0.11+0.093)=243кН.
| |
|
|
|
|
|
Расчет механизма передвижениякрана
|
Лист
|
|
|
|
|
|
32
| |
Изм.
|
Лист
|
№ докум.
|
Подпись
|
Дата
| |
 Скачать 2.74 Mb.
Скачать 2.74 Mb.