|
И
02.12.2021
нформатика, 11 класс К.Ю. Поляков, Е.А. Еремин
Системы управления
Программа ShipControl.exe, которая используется в этой работе, позволяет изучить различные законы управления движением судна. Нужно привести судно в район, обозначенный красной точкой; в этом районе находится радиомаяк, так что экипаж в любой момент может определить курс на маяк 0 и собственный курс судна (см. рисунок).
Судно управляется вертикальным рулём, который можно повернуть на угол от –35 до 35 относительно оси симметрии судна. Положительным будем считать такой угол поворота руля , который приводит к вращению судна по часовой стрелки (для человека, который смотрит в направлении движения судна, это будет поворот вправо). В ситуации, которая изображена на рисунке, нужно поворачивать влево, поэтому угол поворота руля должен быть отрицательным.
В работе вы попробуете привести судно в заданный район , используя четыре варианта управления судном:
ручное управление, когда вы сами изменяете угол поворота руля;
авторулевой, использующий релейный закон управления – переключение между двумя углами перекладки руля, положительным и отрицательным:
Эта запись означает следующее: «если угол меньше, чем 0, то повернуть руль на угол R; если угол больше, чем 0, то повернуть руль на угол –R;».
авторулевой, использующий пропорциональный закон управления (П-регулятор), при котором сигнал управления вычисляется как ошибка = 0 – (разность между направлением на маяк и направлением движения судна), умноженная на некоторый коэффициент k:
 . .
авторулевой, использующий пропорционально-дифференциальный закон управления (ПД-регулятор), при котором сигнал управления учитывает не только значение ошибки , но и скорость её изменения :
 . .
Здесь K и Kd – коэффициенты регулятора, которые вам предстоит выбрать во время выполнения работы.
Главная проблема состоит в том, что судно – это инерционный объект, поэтому оно не сразу реагирует на поворот руля, а затем, когда оно начнёт поворачиваться, не так просто остановить вращение.
Уровень А.
Запустите программу ShipControl.exe. Попробуйте вручную изменять угол поворота руля, перетаскивая мышью рукоятку манипулятора влево и вправо. Убедитесь, что датчик показывает изменение угла поворота руля.
Попробуйте управлять положением руля, используя клавиши-стрелки «влево» и «вправо».
Щелкните по кнопке  и попытайтесь привести судно в заданный район, управляя им вручную. Если не получилось с первого раза, попробуйте снова. Сделайте не более 5 попыток. Ответьте на вопросы: и попытайтесь привести судно в заданный район, управляя им вручную. Если не получилось с первого раза, попробуйте снова. Сделайте не более 5 попыток. Ответьте на вопросы:
Удалось ли вам привести судно в заданный район:
Да
Добавьте в отчёт скриншот вашей лучшей траектории движения:
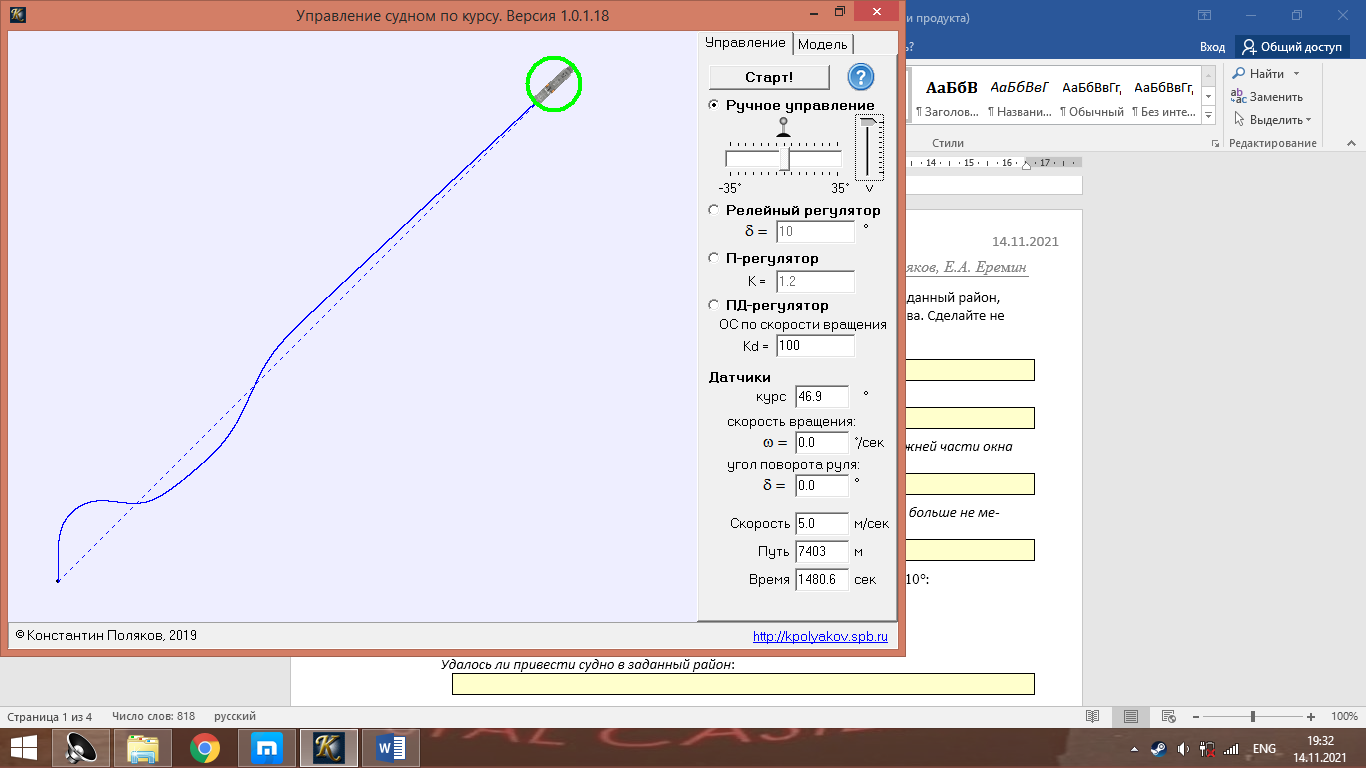
Чему равна длина пути до заданного района (это число выводится в нижней части окна программы):
7403 м
Как будет двигаться судно, если переложить руль на некоторый угол и больше не менять его положение:
Судно будет двигаться по кругу
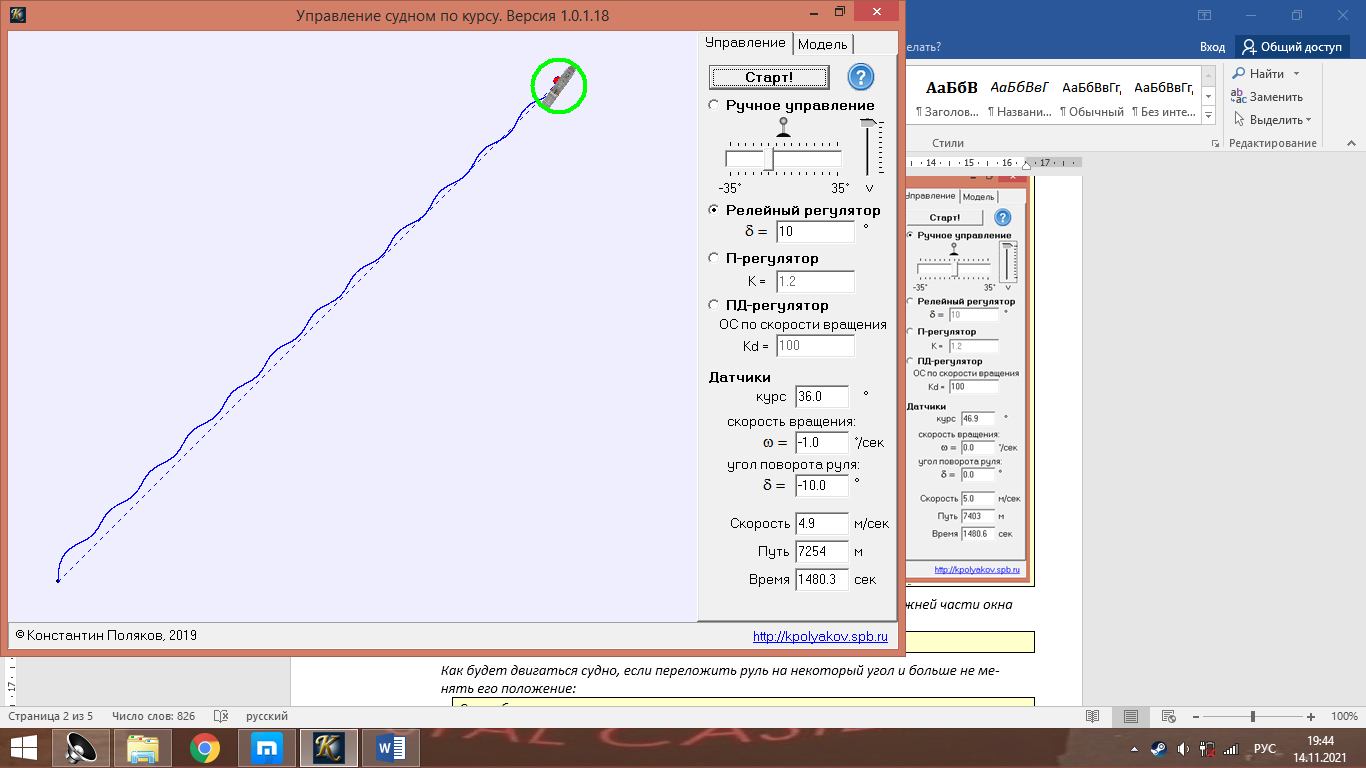
Попробуйте использовать авторулевой с релейным регулятором при R = 10:
Удалось ли привести судно в заданный район:
Да
Сколько времени занял выход в заданную точку:
1480.3 сек
Добавьте в отчёт скриншот траектории движения:
Уменьшите угол перекладки релейного регулятора до R = 4 и повторите моделирование.
Сколько времени занял выход в заданную точку:
1450.8 сек
Что изменилось в поведении судна в сравнении с первым вариантом:
Траектория движения была более прямая
Попробуйте использовать авторулевой с пропорциональным регулятором (П-регулятором) при K= 1,0:
Удалось ли привести судно в заданный район:
Да
Добавьте в отчёт скриншот траектории движения:
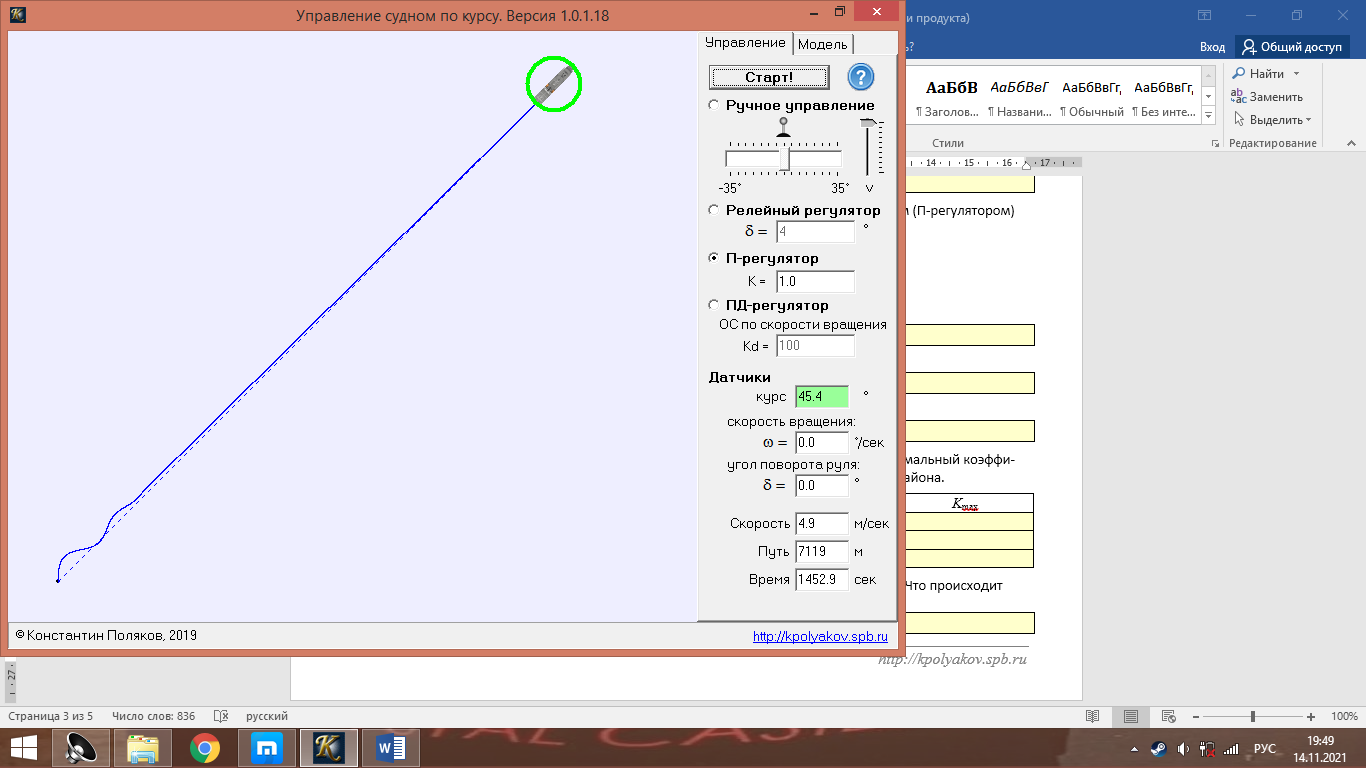
Сколько времени занял выход в заданную точку:
1452.9 сек
Экспериментально определите с точностью до 0,1 минимальный и максимальный коэффициенты усиления П-регулятора, при которых судно достигает заданного района.
-
|
Kmin
|
K
|
Kmax
|
Значение K
|
0,1
|
1,0
|
1,2
|
Число колебаний курса
|
1
|
4
|
10
|
Время движения до точки
|
1452.7
|
1452.9 сек
|
1492.8
|
Сравните траектории движения при Kmin и Kmax со случаем, когда K = 1,0. Что происходит при уменьшении и при увеличении K?
При уменьшении K резкость поворотов уменьшается, и траектория стремится принять линейный вид. При увеличении K судно движется с большими колебаниями.
Уровень B.
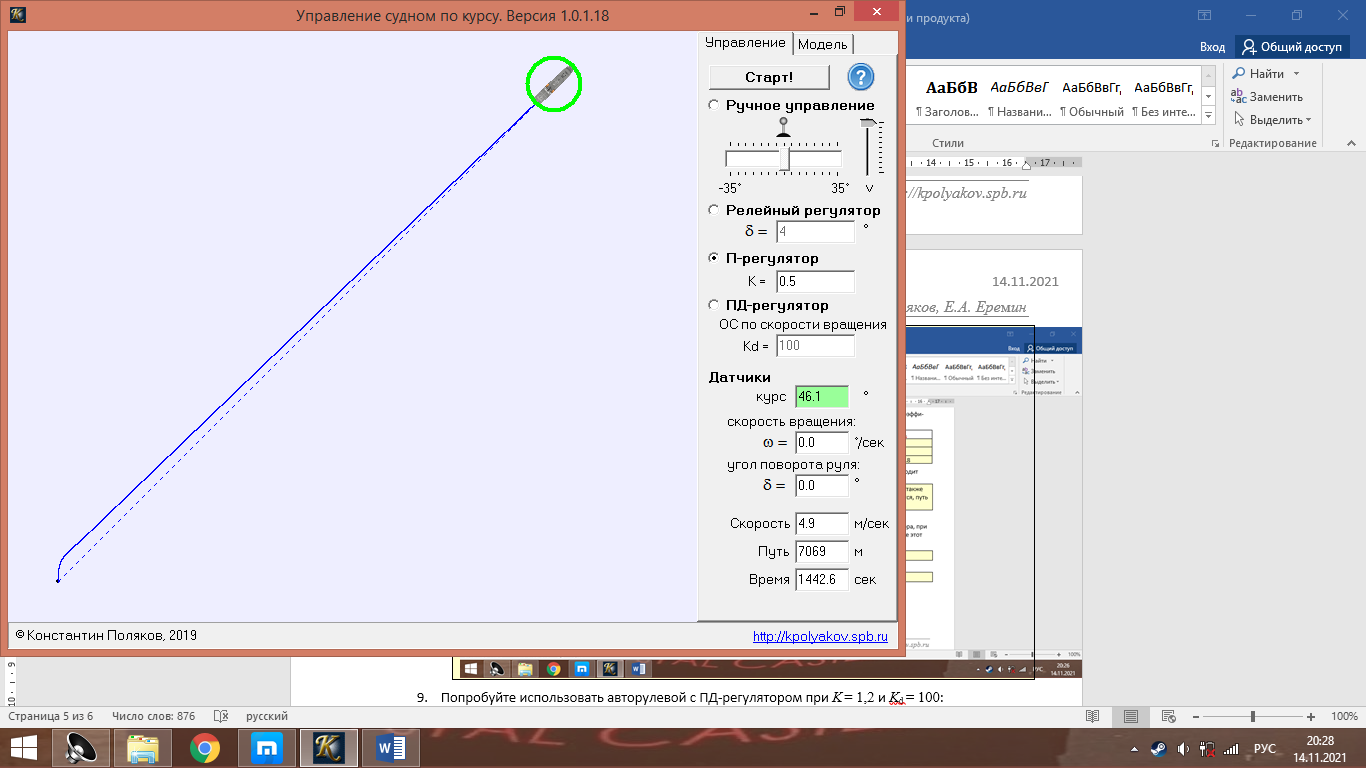
Экспериментально определите с точностью до 0,1 коэффициент усиления П-регулятора, при котором судно достигает заданного района за наименьшее время. Запишите в ответе этот коэффициент и время движения.
K = 0,5; время – 1442.6 сек
Добавьте в отчёт скриншот траектории движения:
Попробуйте использовать авторулевой с ПД-регулятором при K = 1,2 и Kd = 100:
Удалось ли привести судно в заданный район:
Да
Добавьте в отчёт скриншот траектории движения:
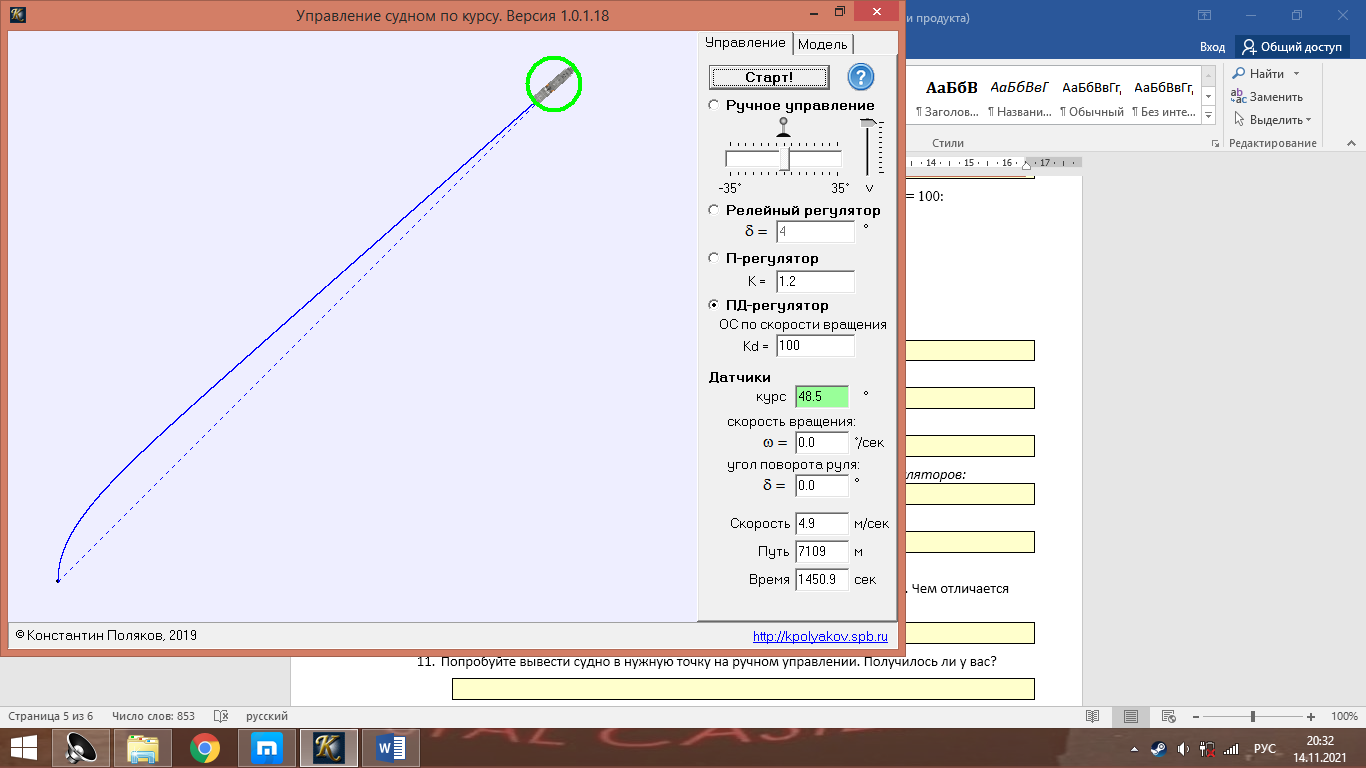
Сколько времени занял выход в заданную точку:
1450.9 сек
Чем отличается результат управления при использовании П- и ПД-регуляторов:
При использовании ПД-регулятора траектория движения судна имеет меньшее количество колебаний.
Какой регулятор вы бы выбрали? Почему?
Я бы выбрал ПД-регулятор. При его использовании судно быстрее достигает заданной точки.
Уровень С.
Перейдите на вкладку Модель и выберите модель судна-контейнеровоза. Чем отличается эта модель от модели учебного судна?
Контейнеровоз менее поворотлив чем учебное судно.
Попробуйте вывести судно в нужную точку на ручном управлении. Получилось ли у вас?
Как вы думаете, почему управлять контейнеровозом сложнее, чем учебным судном:
Контейнеровоз имеет большую скорость.
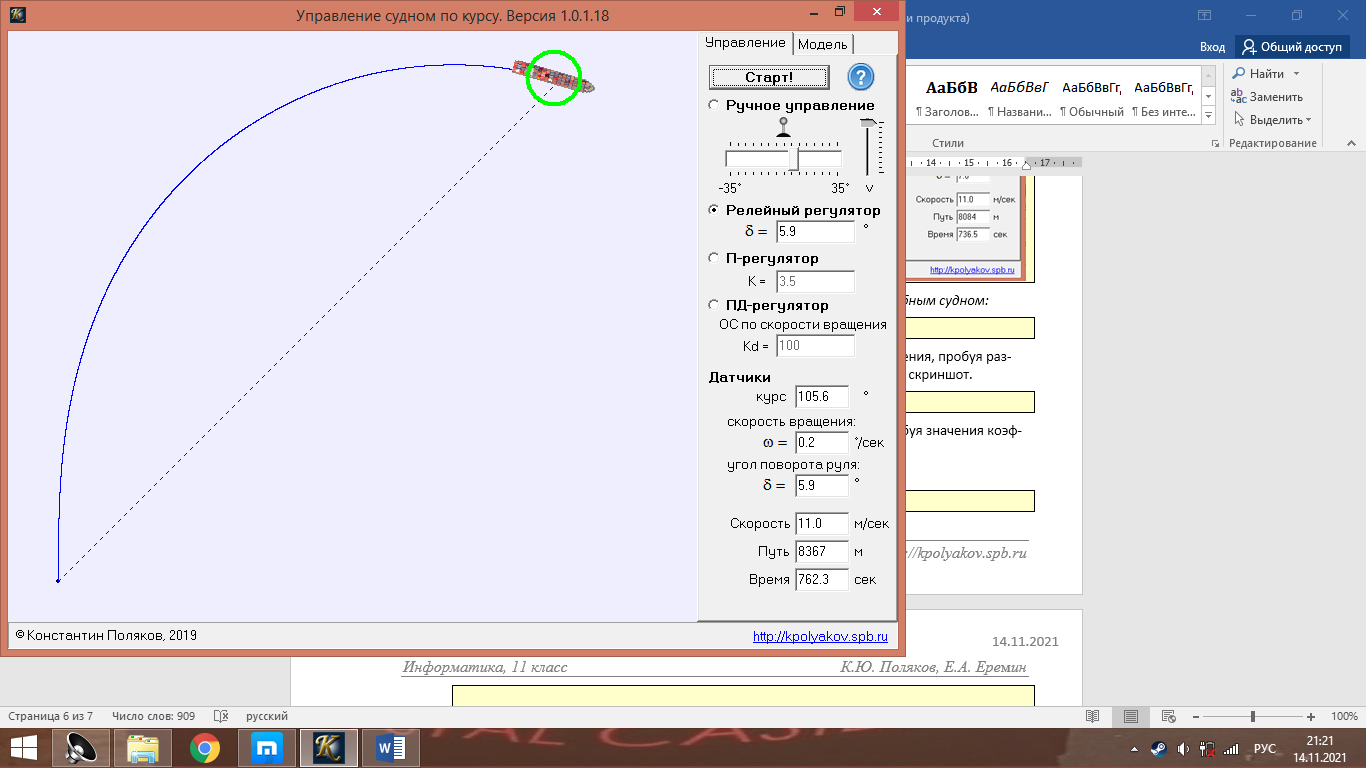
Попробуйте вывести судно в нужную точку с помощью релейного управления, пробуя разные углы перекладки руля. Получилось ли у вас? Если да, вставьте в отчёт скриншот.
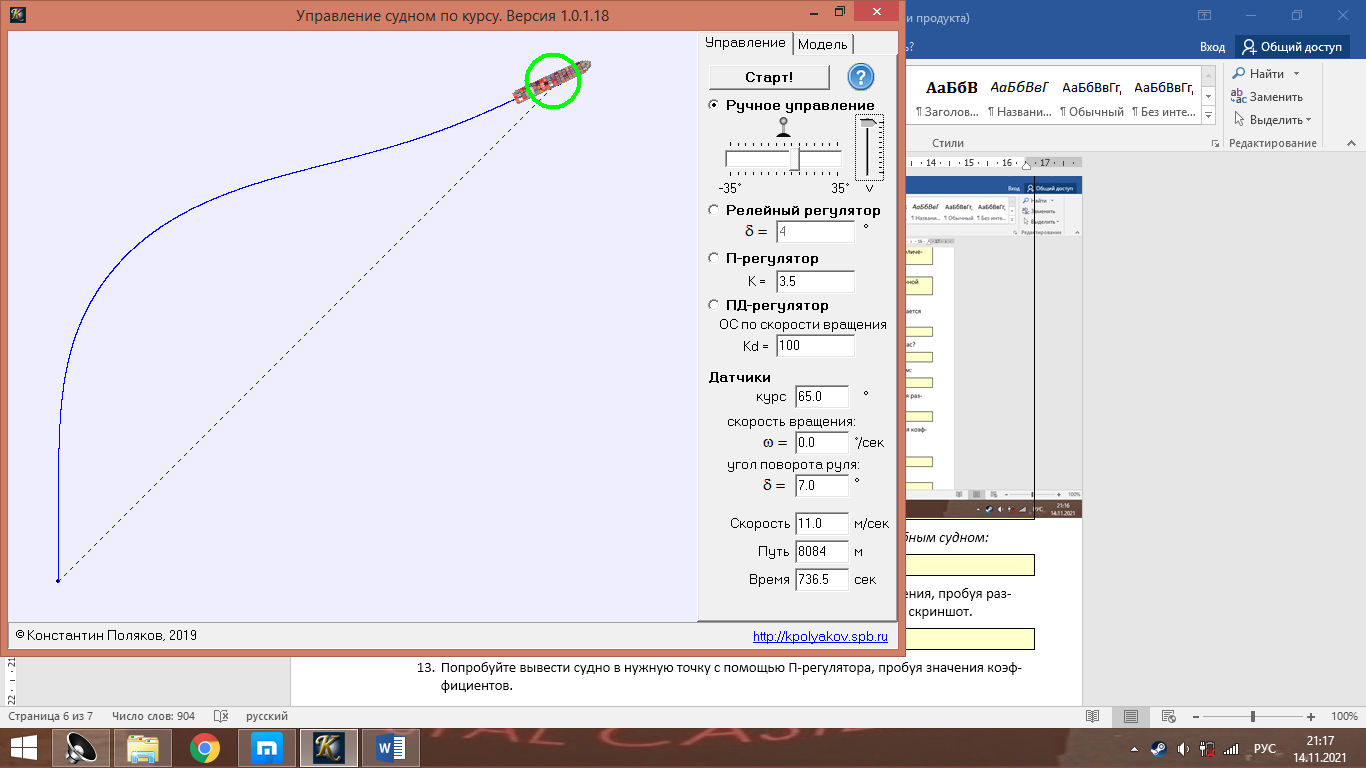
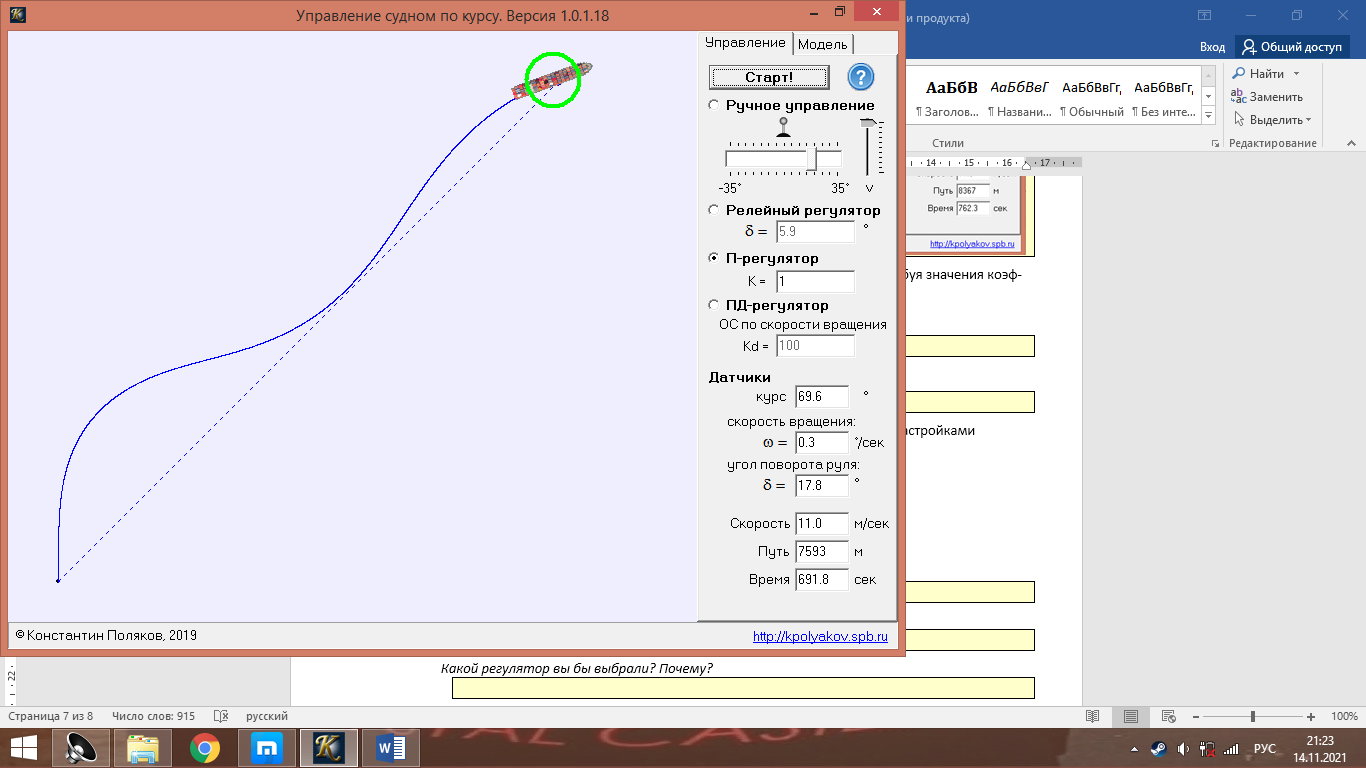
Попробуйте вывести судно в нужную точку с помощью П-регулятора, пробуя значения коэффициентов.
Получилось ли у вас? При каком значении K?
Да, при K = 1
Если да, вставьте в отчёт скриншот.
Попробуйте вывести судно в нужную точку с помощью ПД-регулятора с настройками
Получилось ли у вас? Если да, вставьте в отчёт скриншот.
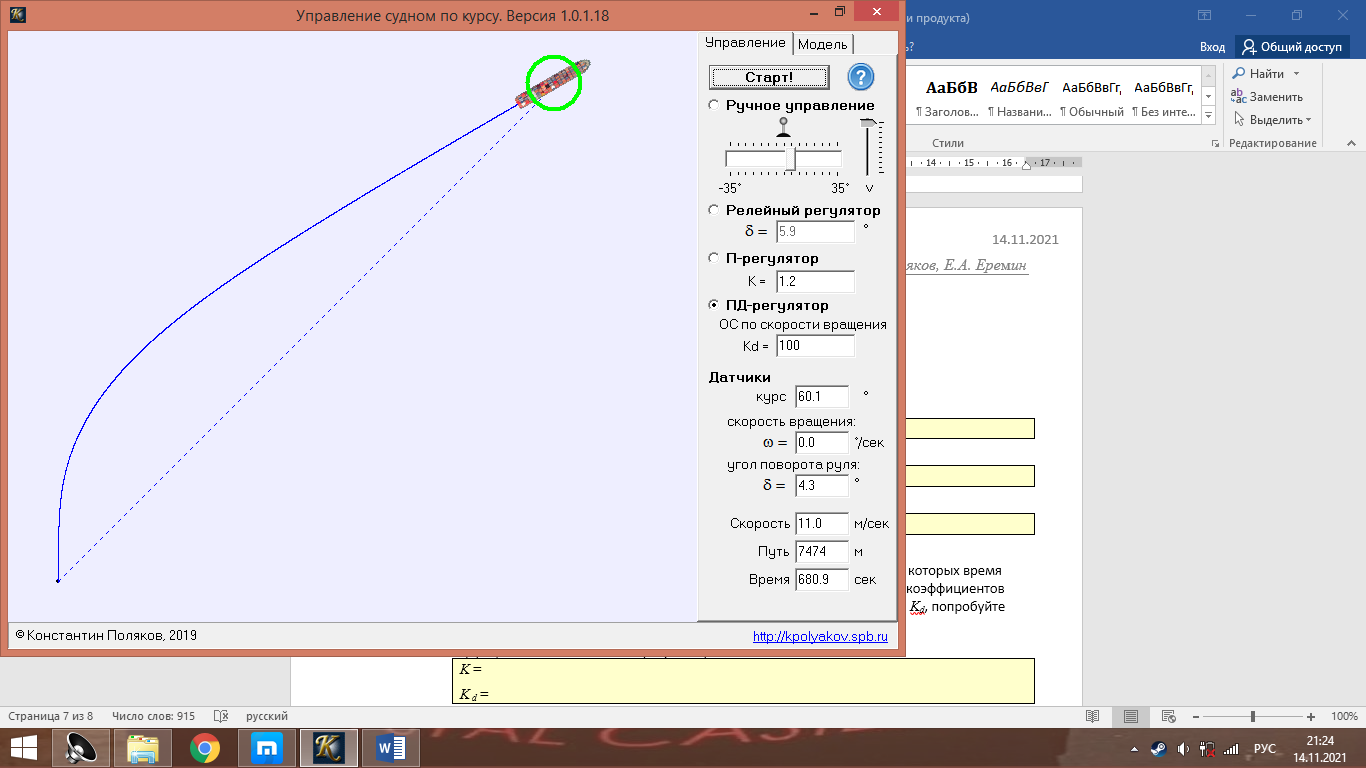
Сколько времени потребовалось?
680.9 сек
Какой регулятор вы бы выбрали? Почему?
Я бы выбрал ПД-регулятор, потому что при его использовании судно достигает заданную точку быстрее.
Уровень D.
Экспериментально найдите значения коэффициентов ПД-регулятора, при которых время выхода в заданную точку наименьшее. Можно сначала изменять один из коэффициентов (например, Kd с шагом 10), и найти лучший вариант. Затем, зафиксировав Kd, попробуйте изменять коэффициент Kтак, чтобы ещё улучшить результат.
Коэффициенты оптимального регулятора:
K = 1.4
Kd = 70
Добавьте в отчёт скриншот траектории движения:
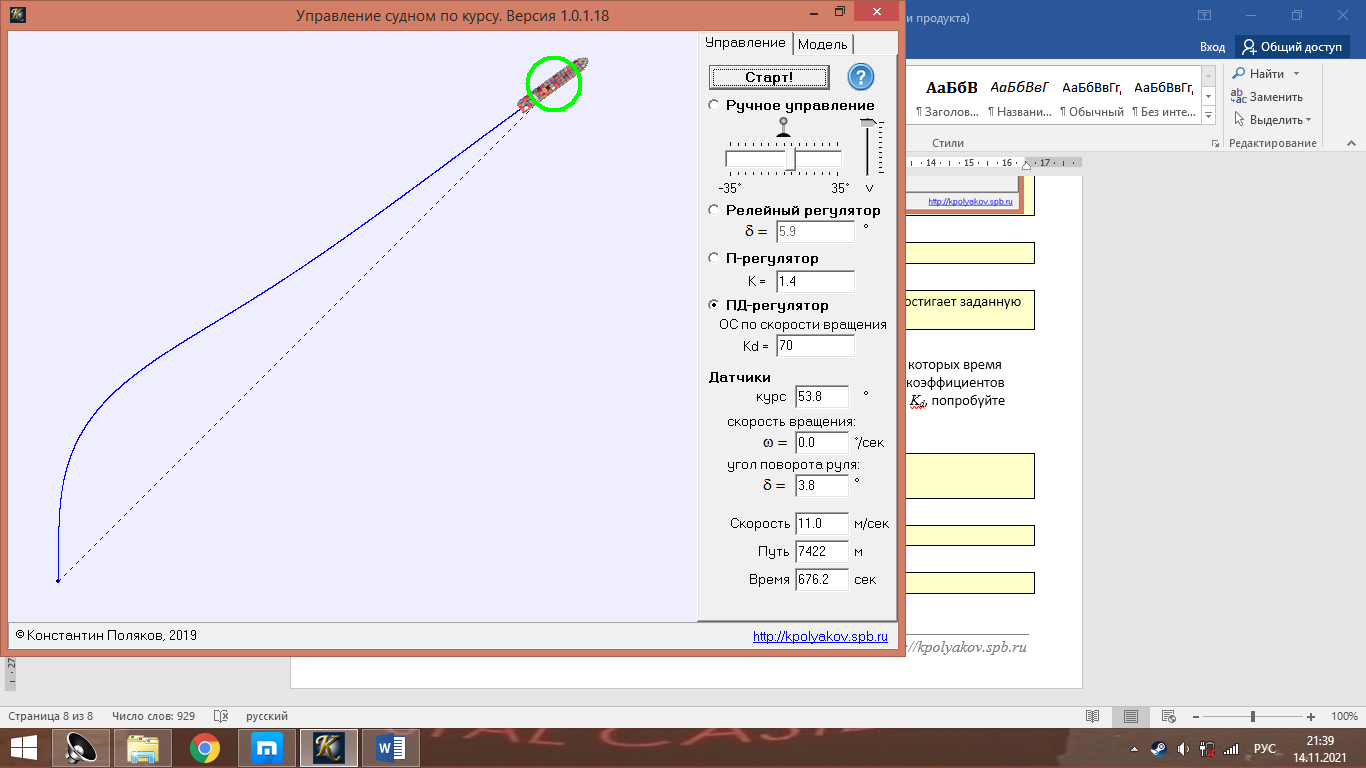
Сколько времени занял выход в заданную точку:
676.2 сек
http://kpolyakov.spb.ru
|
 Скачать 1.26 Mb.
Скачать 1.26 Mb.