ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ. мдк1. Содержание Пневматические исполнительные механизмы
 Скачать 302.59 Kb. Скачать 302.59 Kb.
|

  содержаниеПневматические исполнительные механизмы…………………………….3Как читать пневматические схемы………………………………………..10 Обозначение элементов на пневмосхемах………………………………..11 Обозначение компрессора…………………………………………………11 Ресивер на пневматической схемы………………………………………..12 Пневмомотор……………………………………………………………….12 Обозначение пневмоцилиндра……………………………………..….…..12 Обозначение пневматического распределителя на схемах………….…..13 Обозначения пневмоклапанов на схемах…………………………………15 Обратный клапан…………………………………………………….……..15 Редукционный клапан……………………………………………………...15 Пневматический предохранительный клапан…………………………....15 Дроссель на пневмосхемах…………………………………………….….15 Элементы пневмологики…………………………………………………..16 Порядок чтения пневматической схемы………………………………….16 СПИСОК ЛИТЕРАТУРЫ Пневматические исполнительные механизмыПневматический исполнительный механизм (ПИМ) являются неотъемлемой и основной конструктивной частью пневматического привода (пневмопривода), включающего помимо ПИМ сети подготовки сжатого воздуха (компрессоры воздуха, фильтры и др.) и его распределения. Пневматические системы автоматизированного управления сегодня, в эпоху микропроцессоров и широкого применения цифровой электроники, смотрятся несколько архаично, достаточно громоздкие, к тому же сжатый воздух расходуется при работе пневматических систем. В связи с этим ПИМ являются гораздо менее распространенным классом ИМ в сравнении с ЭИМ в системах автоматизации (около 4 % от объема всех ИМ). Вместе с тем, простота конструкции пневмоприводов, и, как следствие этого, достаточно высокая надежность и ремонтопригодность их, позволяют успешно использовать такие приводы в современных системах автоматизированного управления технологическими процессами. При этом ПИМ широко применяются там, где регламентированы требования по взрывозащите (нефтяное, газовое хозяйство и т.п.). ПИМ предназначены для преобразования изменений давления воздуха Р на выходе регулятора в перемещение h регулирующего органа – клапана, заслонки, шибера, крана и т.п. Регулирующий орган изменяет расход потока жидкости, газа, пара и т.п. вводимого в объект управления, и тем самым вызывает изменение регулируемой выходной координаты. По типу привода пневматические исполнительные механизмы делятся на мембранные и поршневые, по виду движения РО – прямоходные и поворотные. Мембранные пневматические ИМ (МПИМ) с регулирующим клапаном (см. рис. 1.12) заключается в следующем. Под действием давления воздуха Р, подаваемого на мембранный механизм сверху, шток, преодолевая противодействие пружины, изменяет положение клапана, тем самым изменяя проходное сечение клапана. Степень открытия сечения клапана пропорциональна давлению воздуха Р, подаваемого на мембранный механизм. По своей конструкции подобные клапаны выпускают двух типов: одно- и двухседельчатые. Односедельчатые клапаны (см. рис. 1.12 а) испытывают одностороннее действие давления регулируемой среды; оно выражается в "затягивании" или "отжатии" самого седла при изменении направления движения среды через регулирующий орган. Такой эффект является нежелательным, так как нарушает процесс регулирования. Для устранения этого эффекта используют двухседельчатый клапан (см. рис. 1.12 б). Два седла и затворы позволяют потоку регулируемого газа или жидкости протекать одновременно в противоположных направлениях, в результате чего регулирующий орган является разгруженным. Его не затягивает потоком, клапан имеет равномерный ход.  Рис. 1.12. Пневматический исполнительный механизм: а) односедельчатый; б) двухседельчатый Схема мембранного исполнительного механизма (МПИМ) показана на рис. 1.13, а. Перемещение выходного штока 2, соединенного с регулирующим органом, в одну сторону осуществляется силой, которая создается давлением Р, в другую – усилием пружины 3. Сигнал Р поступает в герметичную мембранную «головку», в которой находится мембрана из прорезиненной ткани толщиной 2–4 мм с жестким центром. Снизу на мембрану давит пружина 3. МИМы классифицируют, по размерам мембранных «головок». МПИМы поставляются обычно совместно с регулирующими органами. Так как при снятии давления Р мембрана всегда перемещается вверх, то в зависимости от конструкции регулирующего органа различают нормально открытые и нормально закрытые клапаны. Статические характеристики большинства МИМов близки к линейным (рис. 1.13, б), однако они обладают зоной гистерезиса, составляющей 2 – 15 % от наибольшего значения Р. Эта величина зависит от усилий трения в сальнике 5, от перепада давлений на регулирующем органе, от характеристик пружины и эффективной площади мембраны. Перемещения штока h в среднем достигают 50 – 70 мм, поэтому эффективная площадь Р мембраны зависит от h. По мере возрастания Р зона гистерезиса уменьшается до 2 – 3% и практически не влияет на качество переходных процессов в СУИМ. 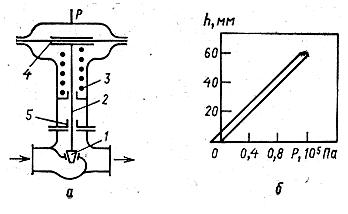 Рис.1.13. Мембранный пневматический исполнительный механизм: а - принципиальная схема, б - статическая характеристика 1 – регулирующий орган; 2 - шток; 3 - пружина; 4 - мембрана; 5 - сальник Управление современными ПИМ, в том числе МПИМ, осуществляют маломощными электрическими сигналами (преимущественно током в пределах 0–20 или 4–20 мА или напряжением в пределах 0–10 В). При этом часто такие ИМ относят к комбинированным, и обозначают как электропневматические исполнительные механизмы аббревиатурой «ЭПИМ». Внешний вид конструкции мембранного ЭПИМ приведен на рис. 1.14.  Рис. 1.14. Внешний вид мембранного электропневматического исполнительного механизма, установленного на запорно-регулирующей арматуре При функционировании ПИМ возрастает объем надмембранной камеры и ухудшаются динамические характеристики цепочки «пневмолиния – МИМ». Основные технические характеристики МИМов представлены в таблице 1.3. Технические характеристики пневматических МИМ Таблица 1.3.
В динамическом отношении МИМы с зоной гистерезиса 2—3 % можно считать усилительными звеньями при частоте среза до 0,3 рад/с. Если зона гистерезиса составляет 5 – 8 %, то частота среза уменьшается на порядок. Динамика МИМа по каналу «давление воздуха на входе в камеру - перемещение штока» при малых возмущениях приближенно описывается апериодическим звеном. В общем случае постоянная времени МИМа зависит от перемещения, штока h. Для уменьшения зоны гистерезиса и улучшения динамических характеристик МИМов на исполнительный механизм устанавливают дополнительные усилители мощности, называемые позиционерами, а точнее - электропневматическими позиционерами применительно к ЭПИМ. Различают позиционеры, работающие по схеме компенсации перемещений и по схеме компенсации сил. В позиционерах обоих типов МИМ охватывается отрицательной обратной связью по положению штока, что исключает влияние на статические характеристики сил трения в сальнике, перепад давлений на регулирующем органе и т.п. Одновременно с этим увеличение расхода воздуха, подаваемого в МИМ, заметно улучшает динамические характеристики последнего. Принципиальные схемы позиционеров обоих типов показаны на рис. 1.15. В позиционере, работающем по принципу компенсации перемещений (рис. 1.15, а), сигнал Р подается в сильфон 1, связанный рычажным механизмом 2 со штоком 3. При изменении Р рычаг вращается относительно опоры О1 и перемещает золотник 5, изменяя тем самым подачу воздуха в камеру МИМа. Мембрана МИМа занимает новое положение, и рычаг 2 начинает поворачиваться относительно оси О2 т.е. начинает работать отрицательная обратная связь. В позиционере, построенном по схеме компенсации сил (рис. 1.15, 6), функции сильфона выполняет мембрана 7, перемещения которой через золотник 5 влияют на расход и давление воздуха, подводимого в камеру МИМа 4. Перемещения мембраны МИМа через толкатель 6 и пружину отрицательной обратной связи 7 уравновешивают силу, действующую на мембрану со стороны давления Р. Позиционеры первого типа используют в МИМах с большими перемещениями штока (40–70 мм), позиционеры с компенсацией усилий – в МИМах с малыми перемещениями. 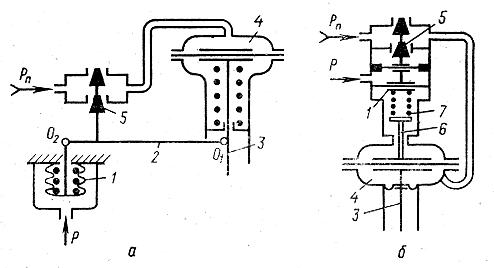 Рис. 1.15. Принципиальные схемы позиционеров: а - с компенсацией перемещений; б - с компенсацией усилий; 1 - чувствительный элемент (сильфон, мембрана); 2 - рычаг; 3 - шток МИМа; 4 - надмембранная камера; 5 - золотник; 6 - толкатель; 7 - пружина обратной связи Часто вместо позиционеров применяют электропневматические преобразователи (последовательное преобразование по схеме «ток управления – расход воздуха – давление воздуха – перемещение РО») без контроля действительного положения штока ИМ. Они проще, надежнее, дешевле и по совокупности критериев практически не уступают электропневматическим позиционерам, если зона гистерезиса ничтожно мала. Поршневые пневматические исполнительные механизмы (ППИМ) применяют в тех случаях, когда требуется перемещать шток ИМ на большое расстояние h (0<h<300 мм). Для повышения точности и улучшения динамических характеристик поршневые приводы снабжают позиционерами, а сами приводы называют следящими. На рис. 1.16 показана принципиальная схема такого поршневого следящего пневмопривода. Он состоит из мембранного блока 1 с большой 2 и малой 3 мембранами, золотника 6 с тремя щелями, поршневого механизма 5 и пружины отрицательной обратной связи 4. При увеличении давления Р золотник смещается влево, и давление питания Рп поступает в левую полость цилиндра 5, перемещая поршень вправо и увеличивая натяжение пружины отрицательной обратной связи до тех пор, пока не наступит равновесие сил, действующих на мембранную систему 2,3. Следящие приводы обладают зоной нечувствительности (не выше 1%), полное время перемещения составляет несколько секунд (при отсутствии нагрузки); в области частот менее номинального значения <0,6 рад/с их можно рассматривать как усилительные звенья. 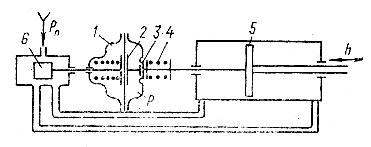 Рис. 1.16. Принципиальная схема пневматического поршневого следящего Рис. 1.16. Принципиальная схема пневматического поршневого следящегопривода: 1 - исполнительный механизм; 2 - большая мембрана; 3 - малая мембрана; 4 - пружина обратной связи; 5 - поршневой механизм; 6 – золотник Поворотные пневматические приводы типа ППР предназначены для управления трубопроводной арматурой (краны шаровые и пробковые, затворы дисковые и шиберные и т.п.) при аналоговом или дискретном управлении положением запорного элемента, когда управляющее воздействие на шток запорного элемента требует поворотного воздействия или приложения к нему вращательного момента. Поворотные пневматические приводы могут рассматриваться как некоторая разновидность поршневого пневматического привода, где поршень, выполненный в виде лепестка, перемещается под давлением управляющего воздуха в специальной камере. Движение силового элемента (лепестка) пневмопривода непосредственно передается на вал запорного элемента трубопроводной арматуры, обеспечивая его требуемое положение. Внешний вид поворотного пневматического привода представлен на рисунке 1.17. Основные технические характеристики поворотного пневматического привода следующие: – давление сжатого воздуха питания пневмопривода – 0,25 – 0,6 МПа; – расход воздуха в установившемся режиме при давлении сжатого воздуха питания 0,6 МПа, температуре сжатого воздуха 10 – 40 °С – не более 0,5 м3/час; – время поворота выходного вала из одного крайнего положения в другое при номинальной нагрузке – не более 3 с. 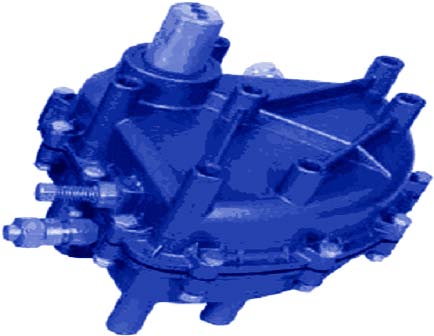 Рис. 1.17. Пневмопривод лопастной типа ППР Поворотные пневматические приводы могут оснащаться дополнительными блоками, обеспечивающими аналоговое или дискретное управление, а также сигнализацию положения вала. Взрывозащищенные блоки имеют взрывозащиту вида «взрывонепроницаемая оболочка». Как читать пневматические схемы Для того, чтобы научиться правильно читать пневматические схемы необходимо знать обозначения отдельных элементов, понимать принцип работы и назначение этих элементов, а также уметь объединять отдельные составляющие в единую пневматическую систему. Это непростая задача, но если разобраться с обозначением элементов, то она станет гораздо легче. Обозначение элементов на пневмосхемах Пневматические линии - трубопроводы, рукава высокого давления, гибкие шланги, каналы изображают линиями. В месте соединения нескольких каналов ставят точку.  Источник сжатого воздуха - энергии для пневматический системы обозначается окружностью с точкой в центре. В данном случае не конкретизируется, что это за источник. Это может быть пневматическая магистраль или компрессорная станция.  Обозначение компрессора Источником сжатого воздуха чаще всего является компрессор, который имеет свое обозначение. Компрессор на схемах обозначается окружностью в которой расположен треугольник - стрелка, указывающий на направление движения воздуха. 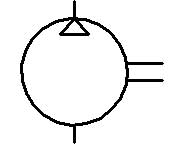 Этот треугольник на пневматических схемах не закрашивается, в отличие от гидравлических схем, где закрашены треугольник на насосах указывает на направление движения жидкости. Зачастую, читать пневматические схемы удобнее начиная от источника энергии - компрессора. Ресивер на пневматической схеме Резервуар для накопления сжатого воздуха - ресивер, изображается на схемах следующим образом. Пневмомотор На обозначении пневматического мотора треугольная стрелка развернута в обратном направлении. Наличие дух стрелок указывает на реверсивность пневмомотора, то есть его способность работать в двух направлениях. 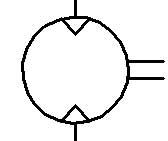 Если обозначение пневматического мотора перечеркнуто стрелкой, значит он регулируемый, то есть регулируется его рабочий объем. Обозначение пневмоцилиндра Пневматический двигатель, позволяющий преобразовать энергию сжатого воздуха в поступательное движение исполнительного механизма называется пневмоцилиндром. Пневматический цилиндр обозначается на схемах следующим образом. 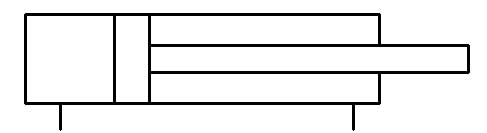 Обозначение пневматического распределителя на схемах Важный элемент на пневматических схемах - распределитель. Он позволяет направить сжатый воздух в различные каналы, например в полости пневматического цилиндра. На схемах пневмораспределитель изображается в исходном положении, то есть при отсутствии на него управляющего воздействия. Пневматический распределитель изображается несколькими прямоугольниками, в каждом из которых изображены стрелки отображающие какой канал с каким будет соединен. Для того, чтобы понять какие каналы соединять при переключении распределителя нужно мысленно передвинуть прямоугольники и посмотреть какие линии соединят стрелки. 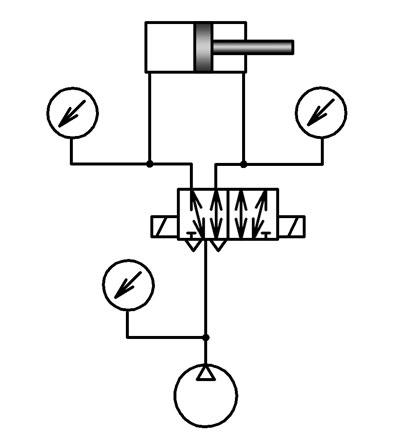
Количество прямоугольников указывает на число позиций распределителя. К периметру прямоугольника подводятся линии отводимые от распределителя. 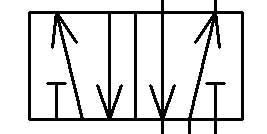 На схеме изображен двух позиционный (два окна) пятилинейный распределитель, его часто обозначают распределитель 5/2. Тип управления распределителем также указывается на схеме. 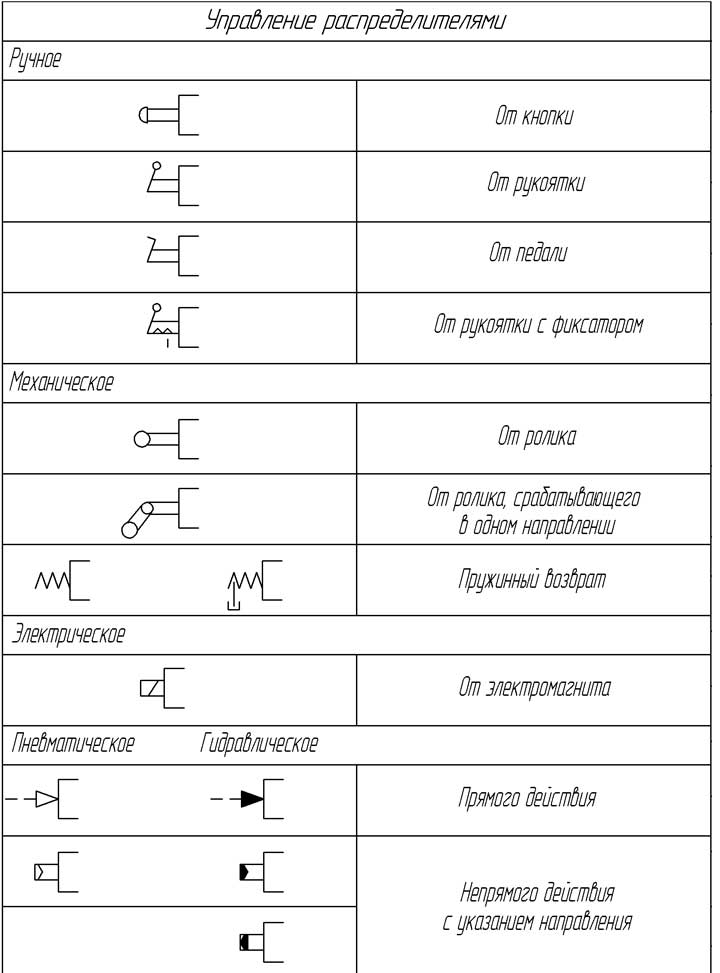 Обозначения пневмоклапанов на схемах Обратный клапан Изображается в виде схематичного седла и запорного элемента - шарика, подпертого пружиной. Если поток прижимает шарик к седлу - клапан поток не пропустит. В обратном направлении поток воздуха через клапан пройдет. 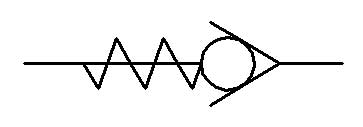 Пружина на обратном клапане может не изображаться. Редукционный клапан Схема обозначения редукционного клапана показана на рисунке. 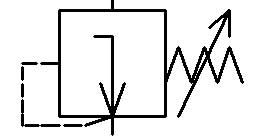 Пневматический предохранительный клапан Предохранительный клапан защищает систему или отдельные элемнты (например ресиверы) от чрезмерно высокого давления. Схема предохранительного пневмоклапана показана на рисунке. Дроссель на пневмосхемах Пневматическое сопротивление обозначается на схеме следующим образом. 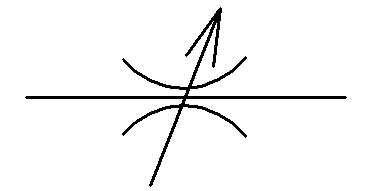 Если сопротивление регулируемое (дроссель), то на нем указывается стрелка. Элементы пневмологики Логические элементы позволяют организовать простейшие вычислительные процессы на основе пневматических элементов, и реализовывать системы пневмоавтоматики. Элемент "ИЛИ" - название элемента указывает на, то что элемент даст сигнал (поток сжатого воздуха) на выходе при наличии давления на входе 1 или на входе 2. Обозначается элемент следующим образом. 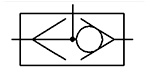 Элемент "И" - данный элемент, подаст сигнал на выход только в случае наличия сигнала и на входе 1 и на входе 2. Пневматическая схема элемента "И" показана на рисунке. 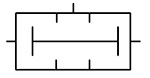 Порядок чтения пневматической схемы Попробуем выработать некий алгоритм, который поможет разобраться в пневмосхеме. Рассмотреть пневматическую схему, ознакомиться с примечаниями, изучить технические требования и технические характеристики (если они имеются); Ознакомиться с перечнем элементов, сопоставить обозначения на схеме с данными в перечне; Найти на схеме источники сжатого воздуха (компрессоры, ресиверы, питающие магистрали); Определить рабочее давление в системе, диапазон изменения расхода; Выделить на схеме устройства регулирования давления - редукционные и предохранительные клапаны, блок подготовки воздуха; Найти на схеме исполнительные механизмы - пнемоцилиндры, захваты, пневмомоторы; Рассмотреть на пневматической схеме элементы управления - распределители, определить какие линии задействует или отключает каждый из них, что является управляющим сигналом для переключения каждого из пневмораспределителей; Провести анализ работы каждой линии определить, что является источником воздуха, какой распределитель задействует линию, какой исполнительный механизм или элемент активируется при наличии (отсутствии) давления в линии; На основе анализа отдельных элементов сделать вывод о работе всей пневматической схемы. При необходимости ознакомиться с технической документацией на ответственные пневмоаппараты. СПИСОК ЛИТЕРАТУРЫ Как читать пневматические схемы, обозначения на пневмосхемах (hydro-pnevmo.ru) Пневматические исполнительные механизмы (studfile.net) | ||||||||||||||||||||||||||||||||||||||||||||