ВКР. Содержание. Введение Общие сведения о системе управления рулем высоты самолета Ан148 Анализ конструкции и работа системы управления рулем высоты самолета Ан148 то системы управления рулем высоты самолета Ан148 Используемая литература Введение
 Скачать 498.09 Kb. Скачать 498.09 Kb.
|

|
Содержание.
Введение В начале 1990-х годов стала очевидной необходимость создания самолёта, способного перевозить на протяжённых маршрутах сравнительно небольшое число пассажиров. Исследования рынка подтвердили предположение, что нужен самолёт с вместимостью, которую обеспечивал Ту-134, но с увеличенной дальностью полёта. Причём новый самолёт должен быть более лёгким, ведь платежи в аэропортах за взлёт-посадку начисляются, исходя из веса воздушного судна. К тому же Ту-134 уже настоятельно требовал замены из-за несоответствия современным нормам по шуму на местности и вредным выбросам.  В поисках схемы нового самолёта на 70—80 пассажиров рассматривалось возможность развития турбовинтового Ан-140 путём удлинения фюзеляжа, совершенствования крыла и установки более мощных двигателей. Анализировался вариант установки реактивных двигателей при удлинении фюзеляжа Ан-140. Действительно, реактивные машины более комфортны для пассажиров, выше скорость, ниже шум и вибрация. При выборе между экономичностью турбовинтового варианта и комфортностью реактивного предпочтение было отдано второму. Кроме Ан-140, в качестве базы для нового самолёта, рассматривался и Ан-74ТК-300. Однако тщательные технико-экономические расчёты заставили принять иное решение. С 18 июля 2001 года началось проектирование самолёта под руководством Петра Балабуева, получившего обозначение Ан-148. По сравнению с Ан-74 у нового самолёта был более длинный фюзеляж с большим диаметром, крыло другой конструктивной схемы, новые двигатели Д-436-148. В процессе проектирования Ан-148 была заложена идеология создания семейства. Базовая модель — Ан-148-100 с длиной фюзеляжа 29,13 метра рассчитывалась на перевозку до 80 пассажиров, а модель Ан-148-200 с длиной фюзеляжа 34,36 метра предназначалась для перевозки до 100 пассажиров. Кроме того, было предусмотрено создание Ан-148T — транспортной версии, грузоподъёмностью 15-20 тонн с боковой грузовой дверью и с задним люком-рампой, а также самолётов грузопассажирского и специального назначения. Были проведены консультации с авиакомпаниями постсоветских стран. Тщательно прорабатывались все их пожелания. Многообразие требований авиакомпаний побудили к проработке нескольких вариантов базовой модели Ан-148-100. Первый вариант, Ан-148-100A, учитывал интересы российской авиакомпании «Аэрофлот» — это облегчённая машина (со взлётным весом 37 тонн) рассчитана была на дальность до 3000 км. Следующий вариант, Ан-148-100В, ориентирован был на интересы украинской авиакомпании АэроСвит, ленинградской «Пулково» и красноярской КрасЭйр. Взлётный вес — 40 тонн, дальность — до 4000 км. Третий вариант, Ан-148-100E (43 тонны) был предназначен для дальности до 5100 км. Ан-148 был спроектирован полностью с помощью компьютерных (цифровых) технологий. Традиционно, одновременно с принятием решения о разработке нового самолёта, надо было определиться с заводом для его серийного выпуска. Вначале рассматривалось возможность производства Ан-148 на Улан-Удэнском заводе, был подготовлен протокол о намерениях, но позже от этого решения отказались. По новому плану производство предусматривалось в Киеве и в Воронеже, в своё время выпускавшем Ан-10 и Ан-12. 17 декабря 2004 года Ан-148 совершил первый свой полёт. При разработке самолёта были использованы узлы и агрегаты производства 214 фирм из 15 стран мира, включая Россию, США, Францию и др. 26 февраля 2007 года Ан-148 получил сертификаты Авиационного регистра МАК и Государственной Авиационной Администрации Украины. Сертификат типа № СТ264-Ан-148. За последние годы разработчиком получен ряд дополнений к сертификату типа, расширяющих возможности использования воздушного судна и вводящие новые его модификации. В 2007 году в Одессе были проведены наземные испытания Ан-148 по взлёту и посадке на грунтовую ВПП, подтвердившие возможность эксплуатации самолёта на неподготовленных грунтовых аэродромах. В 2012 году производитель оценивал рыночную потребность в Ан-148 и его удлинённой версии Ан-158 на период до 2026 года более чем в 500 самолётов. Пик производства пришёлся на 2013 год, когда было выпущено 9 самолётов. Общие сведения о системе управления рулем высоты самолета Ан-148. Рычагами управления по тангажу являются штурвальные колонки пилотов. Они соединены между собой и перемещаются синхронно. Усилия на штурвальных колонках создаются пружинными тягами. Предусмотрена возможность ручного рассоединения колонок рукояткой "РВ РАССОЕДИНЕНИЕ БОРТОВ. ТЯНУТЬ ВВЕРХ". Штурвальные колонки оборудованы механизмами тряски штурвалов (МТШ) для обеспечения тактильной сигнализации превышения допустимого угла атаки. На каждой секции РВ установлены три исполнительных привода − два рулевых агрегата (РА-100-01) ЭДСУ-148 и один автономный рулевой привод (АРП-20Н) РМКУ. Предусмотрено два режима управления РВ: − основной − с работающей ЭДСУ-148; − резервный − при использовании РМКУ. При отказе основного режима управления переход на резервный режим осуществляется автоматически. В основном режиме ЭДСУ-148 обеспечивает: − отклонение секций РВ пропорционально ходу штурвальных колонок; − смещение балансировочного положения РВ от переключателей триммирования (кнопки "ПИК−КАБР" на рукоятках штурвалов) без изменения нейтрального положения штурвальных колонок; − алгоритм работы демпфера тангажа по сигналу угловой скорости тангажа от датчиков ωz; − ограничение угла атаки αдоп, по сигналам от датчиков αист, ωz и ny при удерживании штурвальной колонки в крайнем положении или при воздействии вертикальной турбулентности. Передаточное отношение в цепях управления и демпфирования меняется в зависимости от воздушной скорости и положения закрылков. ЭДСУ-148 представляет собой четырехканальную систему, выполненную в виде двухканальных подсистем (ЭДСУ-А, ЭДСУ-Б). Каждый вычислитель канала (УВ1 − УВ4) осуществляет управление одним РА-100-01, связанным с левой или правой секцией РВ посредством устройства управления приводом руля высоты (УУП РВ). В режиме основного управления по каждой секции РВ работает только один РА-100-01 (в этот момент − "активный"). Связанные с этой секцией РВ другой РА-100-01 ("отключенный") и АРП-20Н являются резервными и работают в режиме демпфирования, отклонение секции РВ приводит к перемещению их штоков. При нарушении нормальной работы "активного" РА-100-01, РА-100-01переводится в режим демпфирования, а ранее "отключенный" РА-100-01 переводится в режим управления и становится "активным". При включенной ЭДСУ-148 сигналы от переключателей триммирования поступают в вычислители УВ1 – УВ4 и устройство УТБ-2 выдает сигнал на электромеханизм триммирования РМ-140А, который отслеживает сигнал положения РВ при нейтральном положении штурвалов. Перемещение штока РМ-140А через дифференциальную качалку суммируется с отклонением штурвальных колонок и по тросовой проводке воздействует на входные звенья приводов АРП-20Н для обеспечения возможности безударного перехода на резервный режим управления. В резервном режиме управления РВ РМКУ обеспечивает: − отклонение секций РВ пропорционально ходу штурвальных колонок; − смещение балансировочного положения РВ от переключателей триммирования (без изменения нейтрального положения штурвальных колонок). Передаточное отношение в цепях управления в резервном режиме имеет постоянное значение (КШ = 0,4). После отказа 4-го канала ЭДСУ-148 по сигналу устройства УТБ-2 включаются в работу АРП-20Н, тем самым автоматически выполняется безударный переход на управление РВ с помощью контура РМКУ. Отклонение штурвальной колонки через механическую проводку перемещает входные звенья приводов АРП-20Н, которые отклоняют секции РВ. Электрические сигналы от переключателя триммирования любой штурвальной колонки непосредственно управляют электромеханизмом триммирования РМ-140А, перемещение штока, суммируясь с отклонением на дифференциальной качалке, воздействует на входные звенья АРП-20. В кабине экипажа установлены переключатели отключения: ЭДСУ, ОПРα и МТШ. Положение секций руля высоты отображается на кадре "КОНФ" МФИ. На индикаторы МФИ и КИСС выводятся дискретные сообщения о состоянии системы управления РВ. Электропитание системы осуществляется постоянным током от левого и правого РУ 27 В и переменным током от ЦРУ и РУ 115/200 В. Гидропитание системы − от ГС № 1 и 2. 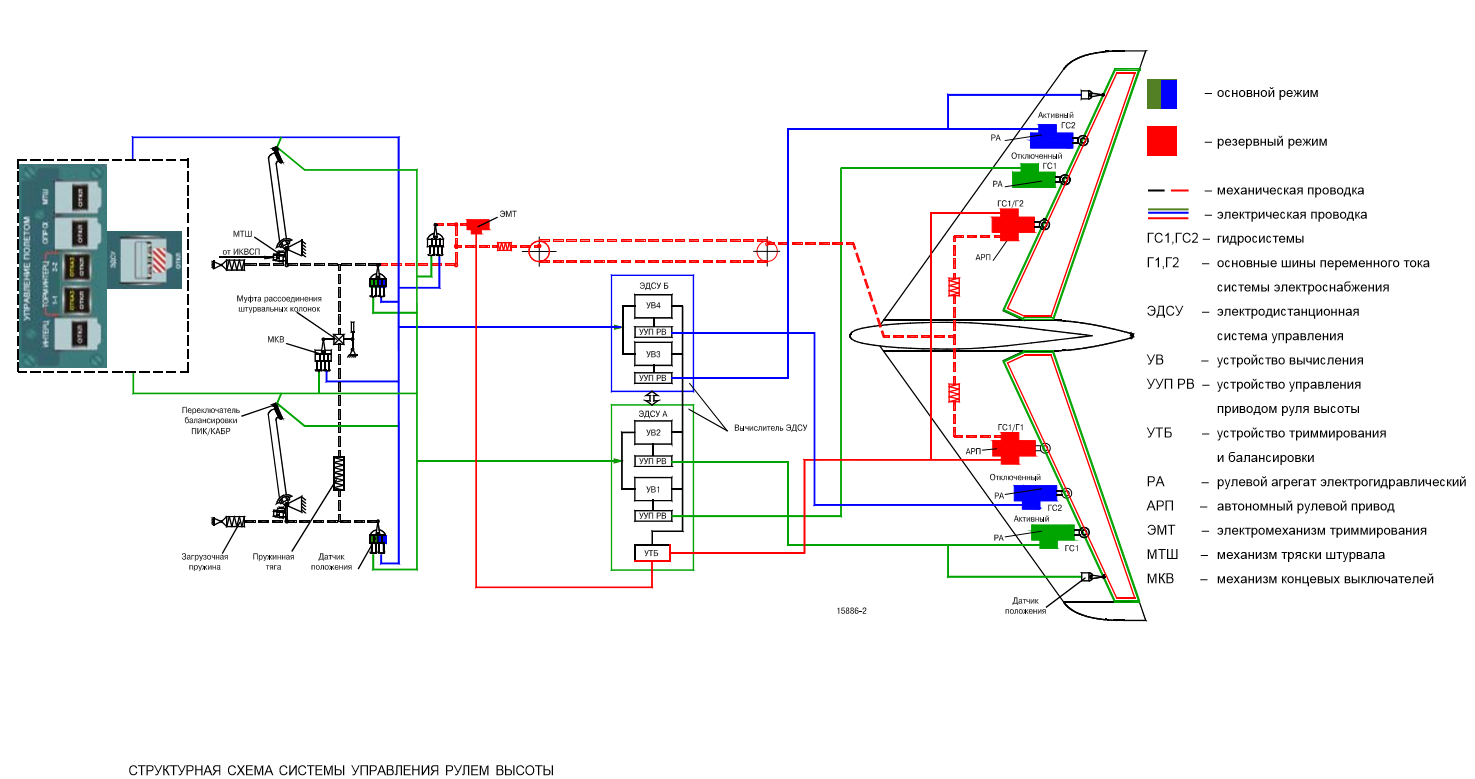 Анализ конструкции и работа системы управления рулем высоты самолета Ан-148. ОБЩИЕ СВЕДЕНИЯ Система предназначена для управления и балансировки руля высоты, установленного на фиксированном стабилизаторе. Система выполняет следующие функции: −отклонение секций руля высоты в соответствии с законами управления; −обеспечение загрузки и триммирование усилий на рычагах управления; −обеспечение тактильной сигнализации превышения допустимого угла атаки. СОСТАВ СИСТЕМЫ Штурвальные колонки с механизмами тактильной сигнализации и пружинными загружателями Датчик положения Датчик сельсинный Механизм концевых выключателей Щиток "ЭДСУ" Автономный рулевой привод Рулевой агрегат Рулевая машина Трансмиссия руля высоты: −участки механической проводки под кабиной экипажа −участки механической проводки в стабилизаторе −тросовая проводка ОПИСАНИЕ Отклонение качалки 16 штурвальной колонки правого пилота посредством тяги 17, качалки 18 и тяги 11 приводит к повороту валика датчика 8, выдающего в систему ЭДСУ-148 электрические сигналы о положении штурвальной колонки. Центрирующая пружина 9 устанавливает валик датчика 8 в нейтральное положение при обрыве этой кинематической цепочки. Загружение штурвальной колонки при ее отклонении выполняется пружинной тягой 15, также выполняющей функции ограничения хода штурвальной колонки в крайних положениях. Отклонение качалки 2 штурвальной колонки левого пилота посредством тяги 3 и качалки 48 приводит к повороту валика датчика 5, связанного с центрирующей пружиной 6. Загружение штурвальной колонки и ограничение хода в крайних положениях выполняется пружинной тягой 1. Синхронизацию отклонения левой и правой штурвальных колонок выполняет кинематическая цепь, включающая качалку 18, включенную муфту рассоединения бортов, развязывающую пружинную тягу 7, качалку 4. Качалки 18 и 4 связаны со штурвальными колонками тягами 17 и 3 соответственно. Муфта рассоединения бортов (см. 27-05-00), входящая в состав механизма рассоединения бортов РВ, состоит из сектора 28 с профилированной осью 10 и плеч двух качалок 18 и 19. Сектор связан тросовой проводкой 12 с рукояткой 13 рассоединения РВ. При извлечении рукоятки 13 "РВ РАССОЕДИНЕНИЕ БОРТОВ ТЯНУТЬ ВВЕРХ" из гнезда на центральном пульте, посредством тросовой проводки 12 происходит поворот сектора 28 муфты. Профилированная ось 10 сектора выходит из паза зева одной из качалок, связанных со штурвальными колонками. Срабатывает микровыключатель 14, в результате чего становится возможным перемещение одной из штурвальных колонок при неподвижной другой колонке. 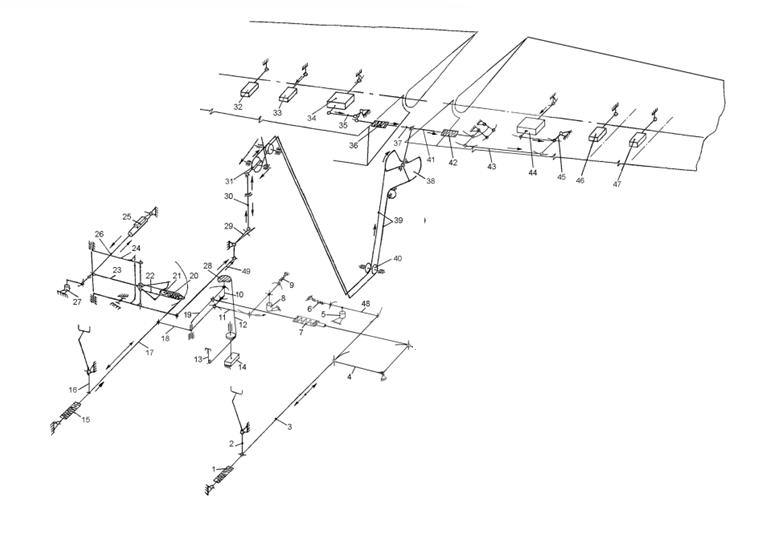 1 пружинная тяга 2качалка штурвальной колонки 3 тяга 4 качалка 5 датчик ДПР-3 6 центрирующая пружина 7развязывающая пружинная тяга 8 датчик ДПР-3 9 центрирующая пружина 10профилированная ось сектора 11тяга 12тросовая проводка 13 рукоятка рассоединения бортов РВ 14 микровыключатель 15 пружинная тяга 16качалка штурвальной колонки 17 тяга 18качалка 19качалка 20пружина 21ролик 22сектор предохранительной муфты 23 качалка 24 рамка 25рулевая машина РМ-140А (электромеханизм триммирования и балансировки) 26 тяга 27 датчик ДПР-3 28сектор муфты рассоединения 29 качалка 30 вертикальная тяга 31ведущий сектор тросовой проводки 32рулевой агрегат РА-100-01 33 рулевой агрегат РА-100-01 34 привод АРП-20Н 35 качалка 36развязывающая пружина 37проводка управления 38ведомый сектор тросовой проводки 39тросы управления 40ролик тросовой проводки 41тяга 42развязывающая пружина 43 тяга 44привод АРП-20Н 45 качалка 46 рулевой агрегат РА-100-01 47рулевой агрегат РА-100-01 48 качалка 49 тяга Для алгебраического суммирования отклонения штурвальных колонок и хода штока электромеханизма триммирования 25 в кинематическую цепь управления РВ встроен дифференциальный механизм, в функцию которого также входит передача перемещения штурвальных колонок на тросовую проводку резервного управления. Дифференциальный механизм образован тягой 17 связи со штурвальной колонкой, тягой 26 связи с электромеханизмом триммирования 25, рамкой 24 механизма и качалкой 23 с предохранительной муфтой. Перемещение качалки 16 штурвальной колонки приводит к отклонению одного плеча качалки 23 относительно другого плеча, связанного со штоком электромеханизма 25, находящегося в неподвижном состоянии. Жестко связанная с качалкой 23 рамка 24 поворачивается в своих подшипниках. Поворот плеча рамки 24 передается тягой 49, качалкой 29, вертикальной тягой 30 на ведущий сектор 31 тросовой проводки резервного управления. При триммировании шток электромеханизма 25, включаемого системой ЭДСУ-148, поворачивает связанное с ним плечо качалки 23 относительно плеча качалки, связанного со штурвальной колонкой, что приводит к повороту рамки 24 механизма. Предохранительная муфта дифференциального механизма состоит из сектора 22, жестко связанного с качалкой 23, ролика 21 в пазу сектора 22 и пружины 20, поджимающей ролик 21 к телу сектора 22. При заклинивании тросовой проводки резервного управления усилием на штурвальной колонке преодолевается сопротивление пружины 20 и ролик 21 выходит из паза сектора. Тем самым штурвальная колонка отключается от дифференциального механизма и штурвальная колонка рассоединяется с тросовой проводкой резервного управления. Тросы управления рулем высоты 39, огибая ролики (на шпангоутах № 8, 39) и проходя направляющие и гермовыводы (на стенке шпангоута № 42), крепятся своими наконечниками к ведомому сектору, расположенному в стабилизаторе. Связанная с сектором жесткая проводка 37 разветвляется на левую и правую консоли стабилизатора и подсоединяется к входным звеньям автономных рулевых приводов 34 и 44. Согласование направления перемещений входных звеньев приводов выполняется качалкой 45. Развязывающие пружины 36 и 42 обеспечивают работоспособность одного привода при отказе другого. Рулевые агрегаты 32, 33, 46, 47 управляются электрическими сигналами от ЭДСУ-148 и в резервном режиме не работают. РАБОТА Рычагами управления по тангажу являются штурвальные колонки пилотов. Они связаны и перемещаются синхронно. Усилия на штурвальных колонках создаются загрузочными пружинами с постоянным линейным градиентом по усилию. Предусмотрена возможность ручного рассоединения штурвальных колонок рукояткой "РВ РАССОЕДИНЕНИЕ БОРТОВ. ТЯНУТЬ ВВЕРХ". Штурвальные колонки оборудованы механизмами тряски штурвалов (МТШ) для обеспечения тактильной сигнализации превышения допустимого угла атаки по сигналам от системы ИКВСП-148. С каждой секцией РВ связаны три исполнительных привода −два рулевых агрегата (РА) ЭДСУ-148 и один автономный рулевой привод (АРП-20Н) резервного механического контура управления (РМКУ). Выдвижение штока привода соответствует отклонению РВ на кабрирование. Предусмотрено два режима управления РВ: −основной −с работающей ЭДСУ; −резервный −при использовании РМКУ. При отказе основного режима управления переход на резервный режим осуществляется автоматически. Переход на этот режим (одновременно с другими каналами управления) можно выполнить с помощью переключателя "ЭДСУ −ОТКЛ". В основном режиме ЭДСУ обеспечивает: −отклонение секций РВ пропорционально ходу штурвальных колонок; −смещение балансировочного положения РВ от переключателей триммирования (кнопки "ПИК −КАБР" на рукоятках штурвалов) без изменения нейтрального положения штурвальных колонок; −демпфирование тангажа по сигналу угловой скорости тангажа от датчиков ωz; −ограничение угла атаки доп по сигналам от датчиков ист, ωz и nу при удержании штурвальной колонки в крайнем положении или воздействии вертикальной турбулентности. Передаточное отношение в цепях управления и демпфирования меняется в зависимости от воздушной скорости и положения закрылков. ЭДСУ представляет собой четырехканальную систему с цифровыми вычислителями, выполненную в виде двухканальных подсистем (ЭДСУ-А, ЭДСУ-Б), размещенных в двух разнесенных контейнерах. Каждый вычислитель канала (УВ1 −УВ4) осуществляет управление одним рулевым агрегатом связанным с левой или правой секцией РВ, посредством устройства управления приводом руля высоты (УУП РВ). Устройство триммирования и балансировки (УТБ-2) обеспечивает согласование положений штоков приводов РА-100-01 системы ЭДСУ и приводов АРП-20Н РМКУ. В режиме основного управления на каждой секции работает только один РА-100-01 (в этот момент −"активный"). Связанные с этой секцией другой РА-100-01 ("отключенный") и АРП-20Н являются резервными и работают в режиме демпфирования (полости гидроцилиндра закольцованы через дроссель), но отклонение секции приводит к перемещению их штоков. При нарушении нормальной работы "активного" РА-100-01, тот приводится в режим демпфирования, а ранее "отключенный" РА-100-01 переводится в режим управления и становится "активным". При включенной ЭДСУ сигналы от переключателей триммирования поступают в вычислители УВ1 −УВ4 и устройство УТБ-2 выдает сигнал на электромеханизм триммирования РМ-140А, который отслеживает сигнал положения РВ при нейтральном положении штурвалов. Перемещение штока РМ-140А через дифференциальную качалку суммируется с отклонением штурвальных колонок и по тросовой проводке воздействует на входные звенья приводов АРП-20Н для обеспечения возможности безударного перехода на резервный режим управления. ВСК ЭДСУ-148 осуществляет контроль исправности "активного" РА-100-01 и переключения на резервный ("отключенный") РА-100-01 при обнаружении отказа. В резервном режиме управления РВ РМКУ обеспечивает: −отклонение секций РВ пропорционально ходу штурвальных колонок; −смещение балансировочного положения РВ от переключателей триммирования (без изменения нейтрального положения штурвальных колонок). Передаточное отношение в цепях управления в резервном режиме имеет постоянное значение (КШ = 0,4). После отказа 4-го канала ЭДСУ-148 сигнал устройства УТБ-2 включает приводы АРП-20Н. Тем самым автоматически выполняется безударный переход на управление РВ с помощью контура РМКУ. Отклонение штурвальной колонки через механическую проводку перемещает входные звенья приводов АРП-20Н, которые отклоняют секции РВ. Электрические сигналы от переключателя триммирования любой штурвальной колонки непосредственно управляют электромеханизмом РМ-140А, перемещение штока которого, суммируясь с отклонением штурвальной колонки на дифференциальной качалке, воздействует на входные звенья АРП-20Н. В кабине экипажа установлен переключатель отключения ЭДСУ, а также лампы-кнопки ОПРα, МТШ и АРП. Во взаимодействующие системы сигналы о положении каждой секции РВ выдаются: −с встроенного датчика положения каждого РА-100-01. Датчик связан со штоком привода, который перемещается вместе с секцией РВ, независимо от того, активен ли РА-100-01 или отключен; −с датчика положения ДС-10, непосредственно связанного с секцией РВ. Положение секций руля высоты отображается на кадре "КОНФ" МФИ. Дискретные сообщения о состоянии системы управления РВ выводятся на индикаторы МФИ и КИСС. ТО системы управления рулем высоты самолета Ан-148 ПРЕДВАРИТЕЛЬНЫЕ РАБОТЫ 1. Убедитесь, что включены: на РУ 27 В лев АЗС: "ПРЕДКРЫЛКИ СИГНАЛИЗ", "ПРЕДКРЫЛКИ РЕЗЕРВН УПРАВЛ"; "ЗАКРЫЛКИ СИГНАЛИЗ", "ЗАКРЫЛКИ РЕЗЕРВН УПРАВЛ"; "ЭДСУ 1, 2, 3, 4"; "АРМ 4-4"; "АРМ 5-5"; "МОДУЛЬ РМКУ"; "АРП РВ ЛЕВ"; "АРП РН"; на РУ 27 В прав АЗС: "ПРЕДКРЫЛКИ ОСНОВН УПРАВЛ"; "ЗАКРЫЛКИ ОСНОВН УПРАВЛ"; "ЭДСУ 1, 2, 3, 4"; "АРМ 3-3"; "АРМ 5-5"; "МОДУЛЬ РМКУ"; "АРП РВ ПРАВ"; на ЦРУ 27 В: "ПРЕДКРЫЛКИ РЕЗЕРВН УПРАВЛ"; "ЗАКРЫЛКИ РЕЗЕРВН УПРАВЛ"; на ЦРУ 115 В: "АРМ 3-3"; "АРМ 4-4"; "АРМ 5-5"; "АРП РВ ЛЕВ (ПРАВ)"; "АРП РН"; "КОНТРОЛЬ НАПРЯЖЕНИЯ АРП ПРАВ"; "КОНТРОЛЬ НАПРЯЖЕНИЯ АРП ЛЕВ"; на РУ 115 В: "ЭДСУ 1, 2"; "ЭДСУ 3, 4"; а) на панели выключателей правого пульта переключатели: − "АРМ3-3 АРП РН"; − "АРМ4-4 АРП РВ ЛЕВ"; − "АРМ5-5 АРП РВ ПРАВ"; б) на щитке "ЭДСУ" верхнего пульта переключатель: − "ЭДСУ"; в) на щитке "Управление полетом" верхнего пульта лампа-кнопка: − "ОПРá" 2. Убедитесь, что ЭДСУ включена. 3. Убедитесь, что включены взаимодействующие системы: СУОСО, КСЭИС, ИКВСП, САУ, БУР, БСТО, БКВ. 4. Кнопкой "КОНФ" на пульте ПУИ КСЭИС вызовите кадр "КОНФ"на экран МФИ. 5. Запустите тест-программы для проверки работы системы управления самолетом нажатием кнопки "ЭДСУ СНЯТИЕ ПАМЯТИ" на пульте предполетной подготовки. Убедитесь в наличии уведомляющего сообщения (зеленого цвета) "ЭДСУ − РЕЖИМ ТЕСТ-КОНТРОЛЯ" на КИСС. Время выполнения теста − не более 10 с. По окончании теста убедитесь в отсутствии сообщения "СШУ − НЕИСПРАВНОСТЬ" на КИСС и МФИ. Убедитесь в отсутствии сообщений о неисправностях СШУ (по сигналам БСТО − не контролировать). ПРОВЕРКА РАБОТОСПОСОБНОСТИ УПРАВЛЕНИЯ РВ В ОСНОВНОМ РЕЖИМЕ 6. Выпустите закрылки на угол 20° (см. 27-00-00, ТК № 501, п. 5). 7. Отклоните левую штурвальную колонку в крайнее положение на себя до упора (на кабрирование). Правая штурвальная колонка должна повторять движение левой штурвальной колонки. Левая и правая секции РВ отклоняются вверх. Максимальный угол отклонения РВ (-30±1)° контролируйте по параметрическому кадру 1 СШУ БСТО. Убедитесь в соответствии направления и величины перемещения символов 11 и 20 левой и правой секций РВ на кадре "КОНФ" вплоть до достижения ими уровня меток предельного отклонения РВ. Верните левую штурвальную колонку в нейтральное положение. 8. Отклоните левую штурвальную колонку в крайнее положение от себя до упора (на пикирование). Правая штурвальная колонка должна повторять движение левой штурвальной колонки. Левая и правая секции РВ отклоняются вниз. Максимальный угол отклонения (20±1)° контролируйте по параметрическому кадру 1 СШУ БСТО. Убедитесь в соответствии направления и величины перемещения символов 11 и 20 левой и правой секций РВ на кадре "КОНФ" вплоть до достижения ими уровня меток предельного отклонения РВ Верните штурвальную колонку в нейтральное положение. 9. Проверьте направление перемещения РВ нажатием на переключатель триммирования на левом штурвале в сторону кабрирования – РВ отклонится вверх. Достижение РВ предельного балансировочного положения обеспечивается десятью нажатиями на клавишу переключателя, что отображается на кадре "КОНФ" достижением символами 11 и 20 РВ крайнего уровня отметки диапазона изменения балансировочного положения. Максимальный угол отклонения РВ (20±1)° контролируйте по параметрическому кадру 1 СШУ БСТО. Верните РВ в нейтральное положение нажатием на клавишу переключателя в сторону пикирования. 10. Проверьте направление перемещения РВ нажатием на переключатель триммирования на левом штурвале в сторону пикирования – РВ отклоняется вниз Достижение РВ предельного балансировочного положения обеспечивается десятью нажатиями на клавишу переключателя, что отображается на кадре "КОНФ" достижением символами 11 и 20 РВ крайнего уровня отметки диапазона изменения балансировочного положения. На кадре КИСС появляются текстовые сообщения "ЗАПАС РВ МАЛ" и "РВ − ТРИММИРУЙ УСИЛИЯ". Максимальный угол отклонения РВ 12,5° контролируйте по параметрическому кадру 1 CШУ БСТО. Верните РВ в нейтральное положение нажатием на клавишу переключателя в сторону кабрирования. 11. Проверьте направление перемещения РВ нажатием на переключатель триммирования на правом штурвале в сторону кабрирования аналогично п. 9 12. Проверьте направление перемещения РВ нажатием на переключатель триммирования на правом штурвале в сторону пикирования аналогично п. 10. 13. Проверьте работу системы в основном режиме при убранных закрылках: 13.1. Полностью уберите закрылки (см. 27-00-00, ТК № 501, п. 7). 13.2. Повторите операции по пп. 2 и 5. Убедитесь, что на кадре "КОНФ" направление перемещения символов 11 и 20 сохраняется, но диапазон перемещения символов значительно уменьшается: − максимальная высота символов РВ значительно ниже отметки предельного отклонения РВ; − при балансировке РВ переключателями триммирования символы РВ не достигают изображенных на кадре границ диапазона балансировочных значений. 13.3. Выпустите закрылки на угол 20° (см. 27-00-00, ТК № 501, п. 5). 14. Проверьте работу ЭДСУ СШУ при отключении режима "ОПРá". На щитке "Управление полетом" верхнего пульта установите лампу-кнопку "ОПРá" в положение "ОТКЛ". Убедитесь: − в появлении на КИСС и МФИ сообщения "ОПРá – ОТКАЗ"; − в отсутствии сообщений "ОТКАЗ РК. ОТКЛЮЧЕНИЕ ОПРá 1-3" (по сигналам БСТО не контролировать). Верните переключатель "ОПРá" в исходное положение и убедитесь в исчезновении на КИСС, МФИ текстового сообщения "ОПРá − ОТКАЗ". 15. Проверьте работу системы при отключении любой гидросистемы: 15.1. Выключите гидросистему ГС1. Убедитесь в появлении сообщений: на КИСС − "ЭДСУ − НЕТ РЕЗЕРВА"; на МФИ − "ЭДСУ РВ ЛЕВ − НЕТ РЕЗЕРВА"; − "ЭДСУ РВ ПРАВ − НЕТ РЕЗЕРВА"; − "ЭДСУ РН − НЕТ РЕЗЕРВА" − "ЭДСУ ЭЛЕРОН ЛЕВ − НЕТ РЕЗЕРВА"; − "ЭДСУ ЭЛЕРОН ПРАВ − НЕТ РЕЗЕРВА". Убедитесь в сохранении работоспособности системы. 15.2. Отклоните одну из штурвальных колонок на себя (на кабрирование) до упора – РВ отклоняется вверх в крайнее положение. На кадре "КОНФ" символы 11 и 20 РВ достигают уровня отметки предельного отклонения РВ. Верните штурвальные колонки в нейтральное положение. 15.3. Отклоните штурвальную колонку от себя (на пикирование) до упора – РВ отклоняется вниз в крайнее положение На кадре "КОНФ" символы 11 и 20 достигают уровня отметки предельного отклонения РВ. Верните штурвальные колонки в нейтральное положение. 15.4. Включите ГС1. Текстовые сообщения на КИСС и МФИ должны исчезнуть. 16. Выключите гидросистему ГС2. Убедитесь в появлении сообщений: на КИСС − "ЭДСУ − НЕТ РЕЗЕРВА"; на МФИ − "ЭДСУ РВ ЛЕВ − НЕТ РЕЗЕРВА"; − "ЭДСУ РВ ПРАВ − НЕТ РЕЗЕРВА"; − "ЭДСУ РН − НЕТ РЕЗЕРВА"; − "ЭДСУ ЭЛЕРОН ЛЕВ − НЕТ РЕЗЕРВА"; − "ЭДСУ ЭЛЕРОН ПРАВ − НЕТ РЕЗЕРВА". Убедитесь в сохранении работоспособности системы. 16.1. Отклоните одну из штурвальных колонок на себя до упора – РВ отклонится вверх в крайнее положение. На кадре "КОНФ" символы 11 и 20 РВ достигают уровня отметки предельного отклонения РВ. Верните штурвальные колонки в нейтральное положение. 16.2. Отклоните одну из штурвальных колонок от себя до упора – РВ отклонится вниз в крайнее положение. На кадре "КОНФ" символы 11 и 20 достигают уровня отметки предельного отклонения. Верните штурвальные колонки в нейтральное положение. 16.3. Включите гидросистему ГС2. Текстовые сообщения на КИСС и МФИ должны погаснуть. 17. Проверьте функционирование механизма тряски штурвала (МТШ): 17.1. Включите тест-сигнал системы ИКВСП (см. 24-13-00, ТК № 501). На обоих штурвалах должна ощущаться тряска. 17.2. Установите лампу-кнопку "МТШ", установленную на верхнем пульте, в положение "ОТКЛ". Тряска должна прекратиться. 17.3. Отключите тест-сигнал системы ИКВСП согласно. Установите лампу-кнопку "МТШ" в положение "ВКЛ". Используемая литература
[1] http://www.mstuca.ru/biblio/; [2] http://www.mstuca.ru/biblio/electronic_storage.php |