БАС. Беспилотная авиация терминология, классификация, современное сос. Список используемых сокращений Глава Терминология и классификация
 Скачать 3.76 Mb. Скачать 3.76 Mb.
|

БПЛА с упруго деформируемым крылом.Крыло в аппаратах такого типа выполняется из композитного материала с большой степенью упругости. Это позволяет сворачивать крыло без опасения потерять его форму (рис. 1.24, а).  а  б  в Рис. 1.24. БПЛА Maverick компании Prioria Robotics (США, 2013): а – общий вид; б – пневматическая катапульта; в – вылет БПЛА из катапульты Оно также хорошо противостоит соударениям с землей и препятствиями. Примером может служить БПЛА Maverick – компактный и очень легкий электрический летательный аппарат, разработанный американской компанией Prioria Robotics [32]. Гибкое упругое крыло позволяет размещать Maverick в небольшом тубусе диаметром 15 см. Кроме того, по заявлению авторов, такое крыло способно частично компенсировать порывы ветра и улучшать стабильность полета. Аппарат оснащен камерой для видео и фото съемки. Запуск БПЛА может производиться как "с руки", так и с помощью специальной пневматической катапульты. После вылета из катапульты аппарат разворачивает крылья (рис. 1.24, б, в). Гибкое крыло не имеет элеронов, поэтому управление осуществляется с помощью небольших аэродинамических рулей в хвостовой части. БПЛА Maverick имеет массу 1,16 кг, радиус действия до 5 км и способен находиться в воздухе от 45 до 90 минут, совершая полет со скоростью от 40 до 100 км/ч. 1.2.2.3. БПЛА вертолетного типа Этот тип аппаратов известен также как БПЛА с вращающимся крылом (англ.: rotary-wing UAV, rotorcraft UAV, helicopter UAV). Часто их называют также VTOL UAV (Vertical Take-off and Landing UAV) – БПЛА с вертикальным взлетом и посадкой. Последнее не совсем корректно, так как в общем случае вертикальный взлет и посадку могут иметь и БПЛА с неподвижным крылом (например, как в СВВП – за счет реактивного сопла, при взлете и посадке направляемого вертикально вниз). Подъемная сила у аппаратов этого типа также создается аэродинамически, но не за счет крыльев, а за счет вращающихся лопастей несущего винта (винтов). Крылья либо отсутствуют вовсе, либо играют вспомогательную роль. Очевидными преимуществами БПЛА вертолетного типа являются способность зависания в точке и высокая маневренность, поэтому их часто используют в качестве воздушных роботов. Существует множество схем построения аппаратов вертолетного типа [33, с. 14-17]. Все рассматриваемые далее схемы построения вертолетов сведены в таблицу 1.3. Рассмотрим более подробно каждую из схем. Таблица 1.3 Схемы построения вертолетов Классическая одновинтовая схема с хвостовым рулевым винтом 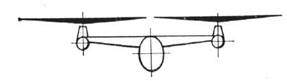 Двухвинтовая поперечная схема 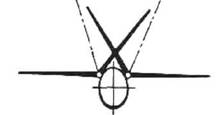 Схема с перекрещивающимися несущими винтами  Вертолеты с крылом  Двухвинтовая соосная схема 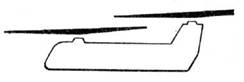 Двухвинтовая продольная схема  Реактивные вертолеты 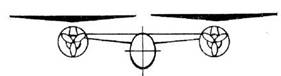 Винтокрылы Гибридные винтокрылые аппараты: Автожиры  Конвертопланы  Многовинтовые вертолеты (мультикоптеры) Одновинтовая схема (англ.: single rotor helicopter). Это летательный аппарат с приводным несущим винтом, который при подъеме аппарата вращается в горизонтальной плоскости. Вертолет движется горизонтально за счёт наклона плоскости вращения винта. Чаще всего используется классическая одновинтовая схема с хвостовым рулевым винтом (рис. 1.25). Реактивный крутящий момент у таких вертолетов уравновешивается рулевым винтом, расположенным на хвостовой балке на некотором расстоянии от оси несущего винта. Создавая тягу в плоскости, перпендикулярной вертикальной оси вертолета, рулевой винт компенсирует реактивный момент. Изменяя тягу рулевого винта, можно управлять вертолетом относительно вертикальной оси. Большинство современных вертолетов выполнено по одновинтовой схеме. Достоинством схемы является простота конструкции и системы управления. К недостаткам следует отнести большие габариты за счет хвостовой балки и потери мощности на привод рулевого винта (до 10% от мощности двигателя), уязвимость и опасность повреждения рулевого винта при полете у земли.  Рис. 1.25. Пример беспилотного вертолета, построенного по одновинтовой схеме с хвостовым рулевым винтом – RQ-8A Fire Scout, разработанный компанией Northrop Grumman (США, 2005) Существуют, однако, варианты реализации одновинтовой схемы, в которых функцию хвостового винта выполняют другие элементы, например, фенестрон (от фр. fenestron – маленькое окно). Это закрытый рулевой винт вертолёта, устанавливаемый в специальный профилированный канал, встроенный в киль вертолета. Пример – вертолет ЕС 120В франко-германской фирмы Eurocopter (рис. 1.26). В отличие от обычных рулевых винтов с 2 или 4 лопастями, фенестроны обычно имеют более 8 лопастей. Преимущества фенестрона: большая безопасность; большая скорость вращения; меньшие шумность и уровень вибраций; существенно более низкие, по сравнению с обычным рулевым винтом, затраты мощности при горизонтальном полете. Недостатки: большая масса; высокая стоимость и высокие требования к тяге двигателя. Другой способ обойтись без хвостового рулевого винта – применение т.н. технологии NOTAR (от англ. NO TAil Rotor). Суть технологии поясняется на рис. 1.27, а.  Рис. 1.26. Фенестрон на вертолете ЕС 120В компании Eurocopter (2003) 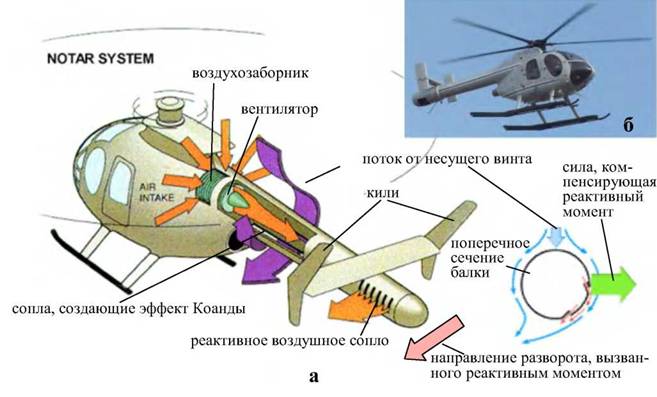 Рис. 1.27. Система NOTAR: а – принцип действия; б – вертолет MD 520N компании MD Helicopters В хвостовой части фюзеляжа (у основания хвостовой балки) расположен вентилятор, приводящийся в движение от редуктора несущего винта. Вентилятор создаёт поток воздуха, выходящий через два узких длинных сопла на правой стенке хвостовой балки, заставляя нисходящий поток воздуха от несущего винта, обдувающего балку, отклоняться влево, создавая аэродинамическую силу, направленную вправо (проявление эффекта Коанды). Кроме того, для управления используется реактивное воздушное сопло на конце хвостовой балки и кили. Достоинства системы NOTAR заключаются в повышении безопасности и значительном снижении уровня шума. Вертолёты, оборудованные этой системой, – одни из самых "тихих". Вертолёты, использующие систему NOT AR, производятся компанией MD Helicopters (США). Двухвинтовая соосная схема (англ.: coaxial rotor helicopter): вертолеты имеют два несущих винта, расположенных на одной оси, с противоположным направлением вращения, за счет чего и компенсируются реактивные моменты (рис. 1.28). Плоскости вращения винтов удалены друг от друга для предотвращения схлестывания лопастей нижнего и верхнего винтов на всех режимах полета. Достоинством схемы являются малые габариты. Недостатки схемы: сложная система трансмиссии и управления, недостаточная путевая устойчивость на авторотации.  Рис. 1.28. Пример беспилотного вертолета, построенного по двухвинтовой соосной схеме – КО АХ Х-240 фирмы Swiss UAV (Швейцария, 2010) Двухвинтовая поперечная схема (англ.: side-by-side rotor helicopter): вертолеты имеют два несущих винта, установленных по бокам фюзеляжа на консолях крыла или фермах. Реактивные моменты уравновешиваются противоположным направлением вращения винтов, которые могут иметь перекрытие при количестве лопастей менее 4-х. Достоинства схемы: аэродинамическая симметрия схемы; небольшие индуктивные потери на режиме горизонтального полета, что повышает экономичность и дальность полета; относительно высокая грузоподъемность. Недостатки схемы: сложность конструкции системы управления и трансмиссии, необходимость синхронизации вращения винтов, дополнительная масса и лобовое сопротивление фермы, поддерживающей крыло. В истории мирового вертолетостроения, пожалуй, самым известным вертолетом, построенным по такой схеме, является, советский вертолет Ми-12 разработки ОКБ M.Л. Миля (рис. 1.29). Однако, большой популярностью в пилотируемой авиации эта схема не пользовалась. В беспилотной авиации в последние годы наблюдается рост интереса к двухвинтовой поперечной схеме. Однако она используется, как правило, не в чистом виде, а именно: из соображений простоты конструкции для управления движением используется не автоматы перекоса, а различные другие технические решения (рис. 1.30).  Рис. 1.29. Вертолет, построенный по двухвинтовой поперечной схеме (вертолет Ми-12 1967 года постройки – самый большой в мире вертолет, диаметр несущего винта 35 м, максимальная взлетная масса 105 т)  а  б  в  г Рис. 1.30. Концепты беспилотных вертолетов, основанные на двухвинтовой поперечной схеме Например, для управления движением могут использоваться: – дополнительный небольшой хвостовой винт, вращающийся в горизонтальной плоскости – для управления углом тангажа (рис. 1.28, а); – управляемые заслонки на выходе импеллеров (рис. 1.30, а); – повороты (на небольшой угол) вокруг своей оси балок с укрепленными на их концах роторами (рис. 1.30, б, в, г); – небольшие отклонения балок с роторами в вертикальной плоскости относительно точек их крепления (рис. 1.30, г); – изменение соотношения частот вращения винтов и др. Очень часто в беспилотных вертолетах, построенных по двухвинтовой поперечной схеме, используют не открытые винты, а винты, защищенные кольцевым кожухом (англ.: ducted fan), или импеллеры (рис. 1.30, а, в). Это увеличивает эффективность винтов и делает более безопасными полеты в условиях возможных столкновений с препятствиями. Легкие БПЛА, построенные по данной схеме, часто называют бикоптерами (англ.: bicopter, twincopter, dualcopter). Их можно классифицировать также как подкласс мультикоптеров (см. далее – табл. 1.3). Двухвинтовая продольная схема (англ.: tandem rotor helicopter). У таких вертолетов реактивный момент компенсируется за счет противоположного направления вращения винтов, которые расположены один за другим вдоль фюзеляжа (рис. 1.31). Несущие винты располагаются с перекрытием, причем задний винт имеет превышение, чтобы уменьшить вредное влияние на него потока от переднего винта. Достоинство схемы – большой объем грузовой кабины. Недостатками являются сложная система трансмиссии, необходимость синхронизации вращения несущих винтов, большие индуктивные потери при горизонтальном полете и переменные нагрузки на несущих винтах, а также сложная посадка при авторотации.  Рис. 1.31. Пример беспилотного вертолета, построенного по двухвинтовой продольной схеме – DP-6 Whisper компании Dragonfly Pictures (США, 2007). Назначение: разведка, ретрансляция ТВ-сигнала. Длина 3,35 м. Диаметр ротора 3,2 м. Максимальная взлетная масса 215 кг, масса полезной нагрузки 34 кг. Скорость 185 км/ч. Продолжительность полета 5,5 ч. Двигатель: ДВС, 97 л.с. Схема с перекрещивающимися несущими винтами (синхроптер) (англ.: intermeshing rotor helicopter). У таких вертолетов несущие винты расположены по бокам фюзеляжа, а их оси наклонены наружу (рис. 1.32). Из-за наклона винтов реактивные моменты уравновешиваются только относительно вертикальной оси, а их проекции относительно поперечной оси складываются, образуя момент тангажа, что необходимо учитывать при расчете продольной устойчивости. Достоинством схемы являются малые габариты вертолета, а недостатками – необходимость синхронизации вращения винтов, сложная система трансмиссии, большой уровень вибраций, возникновение продольного момента, усложняющего балансировку вертолета. Вертолет хорошо приспособлен для вертикального подъема грузов.  Рис. 1.32. Синхроптер К-МАХ фирмы Kaman Aerospace (США). Беспилотная версия разрабатывается совместно с фирмой Lockheed Martin. Способен перевозить грузы массой до 2,7 тонны на расстояние до 500 километров. Максимальная скорость до 185 км/ч. В 2011 г. использовался в Афганистане в беспилотном режиме для доставки боеприпасов. Реактивный вертолет (англ.: tip jet helicopter). У таких вертолетов механический привод несущего винта заменен реактивным. Суммарный крутящий момент на втулке несущего винта близок к нулю, так как момент несущего винта от сил сопротивления воздуха уравновешивается моментом, создаваемым тягой реактивных двигателей или сопел, установленных на концах лопастей (рис. 1.33). 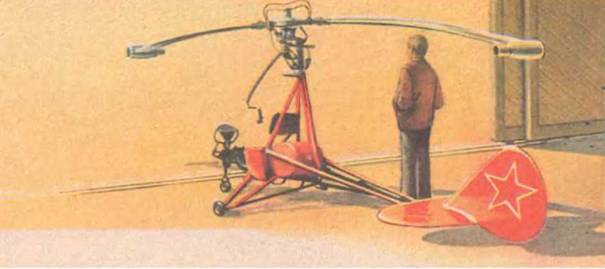 Рис. 1.33. Экспериментальный реактивный мини-вертолет с пульсирующими реактивными двигателями, установленными на концах лопастей (СССР, 1947 год) При этом отпадает необходимость в мощном рулевом винте. Реактивный привод несущего винта может осуществляться, например, установкой на концах лопастей реактивных двигателей различного типа, топливо к которым подается через втулку и лопасти винта. Достоинствами вертолетов с реактивным приводом являются простая система трансмиссии и высокая весовая отдача. К недостаткам следует отнести сложную конструкцию втулки и лопасти несущего винта, трудность создания специальных двигателей, работающих в поле центробежных сил, большой расход топлива, а также шум от прямоточных и пульсирующих воздушно-реактивных двигателей. Пример беспилотного вертолета такой схемы – аппарат ORCA швейцарской фирмы Swiss Unmanned Systems (рис. 1.34). У этого вертолета реактивный двигатель мощностью 215 л.с. установлен сверху. От него горячий воздух (700 °С) подается через полые лопасти к соплам, расположенным на окончаниях этих лопастей. Максимальная взлетная масса вертолета 350 кг, масса полезной нагрузки 120 кг. Потолок составляет 375 м. Длительность полета 2,5 ч. Вертолеты с крылом. Рост скорости вертолета ограничен срывом потока с отступающей лопасти несущего винта. Для увеличения скорости полета необходимо разгрузить несущий винт. Это может осуществляться постановкой крыла на вертолет. Типичные примеры приведены на рис. 1.35.  Рис. 1.34. Реактивный беспилотный вертолет ORCA фирмы Swiss Unmanned Systems (Швейцария, 2011)     Рис. 1.35. Вертолеты с крылом Винтокрылы. Для увеличения скорости полета у этих аппаратов используют крылья и дополнительные тянущие двигатели. Подъемная сила на режиме вертикального полета создается несущим винтом, а на режиме горизонтального полета – крылом с дополнительными тянущим (или толкающим) винтом. В англоязычных источниках этот класс аппаратов встречается под самыми разными названиями: gyrodyne, compound helicopter, compound gyroplane, heliplane [34]. Несущих винтов у винтокрыла может быть два (как у вертолета Ка-22, рис. 1.36) или один (как у вертолета Eurocopter ХЗ, рис. 1.37). Возможны также варианты с несущими винтами, выполненными по сосной схеме, как у винтокрыла Sikorsky S-97 Raider (рис. 1.38).  Рис. 1.36. Винтокрыл Ка-22 (СССР, 1960)  Рис. 1.37. Винтокрыл Eurocopter ХЗ. Выпускается с 2010 г. компанией Eurocopter (Франция-Германия). Максимальная крейсерская скорость 430 км/ч Винтокрыл, обладая несущим винтом, может производить вертикальный взлёт и посадку, как вертолёт. В полёте наличие крыла и дополнительных движителей, как у самолёта, позволяет ему развивать достаточно большую скорость по сравнению с аналогичным вертолётом, что является основным преимуществом. В горизонтальном полёте несущий винт винтокрыла работает в режиме авторотации (или очень близким к нему), как у автожира. Недостатком является сложность конструкции.   Рис. 1.38. Sikorksy S-97 Raider – перспективный скоростной многоцелевой винтокрыл (США). Летные испытания планируются на 2014 г. Разрабатывается в пилотируемой и беспилотной версиях. Максимальная крейсерская скорость 490 км/ч Гибридные винтокрылые аппараты – автожиры и конвертопланы. Кроме рассмотренных классов аппаратов самолетного и вертолетного типа существуют их гибридные разновидности, такие как автожиры и конвертопланы, которые имеют некоторые признаки как вертолетов, так и самолетов. Автожир (другие названия: гирокоптер, гироплан, ротаплан, англоязычные: autogiro, gyrocopter, gyroplane, rotoplane) – схема, подобная самолёту, у которого в качестве крыла (или в дополнение к нему) установлен свободно вращающийся винт (рис. 1.39) [35]. Как и вертолёту, автожиру несущий винт необходим для создания подъёмной силы, однако создание подъемной силы основным винтом автожира основано на другом принципе. Он создает виртуальную дисковую поверхность, при набегании на которую встречного потока воздуха и создаётся подъёмная сила. Здесь существенно, что в полёте этот винт наклонён назад, против потока – подобно фиксированному крылу с положительным углом атаки (вертолёт, наоборот, наклоняет винт в сторону движения, т.к. создаёт приводным несущим винтом и подъёмную, и горизонтальную пропульсивную силы одновременно). Кроме несущего ротора, автожир обладает ещё и тянущим (рис. 1.39, а) или толкающим (рис. 1.39, б) маршевым винтом (пропеллером), как и у обычного самолёта. Этот маршевый винт и сообщает автожиру горизонтальную скорость [36-38 ].  а  б Рис. 1.39. Автожиры: а – Cierva С19 (Великобритания, 1929); б – современный легкий автожир Автожиры отличаются от винтокрылов, которые имеют подключаемый привод несущего винта от двигателя, позволяющий им использовать как режим авторотации, так и режим вертолётного полёта. На больших скоростях их роторная система действует сходным с автожиром образом (в режиме авторотации), обеспечивая только подъёмную силу, но не тягу. Можно сказать, что винтокрылы занимают промежуточное положение, сочетая в себе качества автожиров и вертолётов [35]. Большинство автожиров не могут взлетать вертикально, но им требуется гораздо более короткий разбег для взлёта (10-50 м, с системой предраскрутки ротора), чем самолётам. Почти все автожиры способны к посадке без пробега или с пробегом всего несколько метров. По маневренности они находятся между самолётами и вертолётами, несколько уступая вертолётам и абсолютно превосходя самолёты. Автожиры превосходят самолёты и вертолёты по безопасности полёта. Самолёту опасна потеря скорости, поскольку он сваливается при этом в штопор. Автожир при потере скорости начинает снижаться. При отказе мотора автожир не падает, вместо этого он снижается (планирует), используя эффект авторотации (несущий винт вертолёта при отказе двигателя также переводится в режим авторотации, но на это теряется несколько секунд и падают обороты ротора, важные при вынужденной посадке). При посадке автожиру не требуется посадочная полоса. Скорость автожира сравнима со скоростью лёгкого вертолёта и несколько уступает лёгкому самолёту. По расходу топлива они уступают самолётам, техническая себестоимость лётного часа автожира в несколько раз меньше, чем у вертолёта, благодаря отсутствию сложной трансмиссии. Типичные автожиры летают со скоростью до 180 км/ч), а расход топлива составляет 15 л на 100 км при скорости 120 км/ч. Другими преимуществами автожиров являются гораздо меньшая, чем в вертолётах, вибрация, а также способность летать при значительном (до 20 м/с) ветре. В настоящее время автожиры производятся и в беспилотном исполнении фирмами разных стран. Назначение их самое разнообразное. Так, российская компания "Рустехресурс" (г. Воронеж) разработала беспилотный автожир "Химик" для сельскохозяйственных работ – опыления посадок химикатами (рис. 1.40) [39].  Рис. 1.40. Беспилотный автожир "Химик" (Россия, 2012) Конвертоплан (англ.: convertiplane, heliplane) – летательный аппарат с поворотными винтами, которые на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте – как тянущие (при этом в полете подъёмная сила обеспечивается крылом самолётного типа). Таким образом, этот аппарат ведет себя как вертолет при взлете и посадке, но как самолет в горизонтальном полете. Большие винты конвертоплана помогают ему при вертикальном взлете, однако в горизонтальном полете они становятся менее эффективными по сравнению с винтами меньшего диаметра традиционного самолета [40]. В некоторых конструкциях используют не открытые винты, а импеллеры. Импеллер обладает очень высокой скоростью отбрасываемого воздушного потока, что позволяет обойтись очень маленькими крыльями, обеспечивая высокую компактность конвертоплана. Среди конвертопланов можно выделить три принципиально различающихся подкласса: аппараты с поворотными винтами (Tiltrotor), с поворотным крылом (Tiltwing) и со свободным крылом (Freewing). В конвертопланах с поворотными роторами обычно поворотными являются не сами винты, а гондолы с винтами и двигателями. Крылья (обычно небольшой площади) при этом остаются неподвижными. На рис. 1.41 приведен пример беспилотного конвертоплана типа Tiltrotor.  Рис. 1.41. Беспилотный конвертоплан Smart с поворотными винтами – Tiltrotor (Южная Корея, 2011) Пример конвертоплана с поворотными роторами, в конструкции которого применены импеллеры, – американский аппарат Х-22А разработки компании Bell (рис. 1.42).   Рис. 1.42. Конвертоплан Bell Х22А с поворотными импеллерами (США, 1967) Этот аппарат, разработанный еще в 1967 г., мог совершать как вертикальные взлеты/посадки, так и обычные (укороченные). Традиционный фюзеляж имел расположенные в задней части короткие крылья, на передней кромке каждого из которых размещались импеллеры. Управляющие поверхности элеронов находились в турбулентном потоке воздуха от трехлопастного винта диаметром 2,13 м. Силовая установка – четыре турбовальных газотурбинных двигателя, расположенных попарно на заднем крыле и работающих на общую трансмиссию. Конвертопланы с поворотными импеллерами в пилотируемой авиации сейчас применяются редко (видимо, по экономическим причинам). В беспилотной же авиации у этой схемы, видимо, есть определенные перспективы. Пример – разрабатываемый в США с 2008 г. компанией American Dynamics проект беспилотного конвертоплана с поворотными импеллерами AD-150 (рис. 1.43) [41]. В конвертопланах с поворотным крылом поворачивается всё крыло вместе с установленными на нем двигателями и винтами. Достоинством такой схемы является то, что при вертикальном взлёте крылья не закрывают воздушный поток от винтов (увеличивая тем самым эффективность работы винтов). На рис. 1.44 приведены примеры конвертопланов типа Tiltwing.  Рис. 1.43. Беспилотный конвертоплан AD-150 компании American Dynamics с поворотными импеллерами (США, 2008)  а  б Рис. 1.44. Конвертопланы с поворотным крылом – Tiltwing: а – экспериментальный конвертоплан Vertol VZ-2 (США, 1957); б – современный беспилотный четырехмоторный Tiltwing на вертикальном взлете – БПЛА компании GH Craft (Япония, 2008) Беспилотные конвертопланы с четырьмя поворотными роторами, подобные тому, что показан на рис 1.42, а также конвертопланы с поворотным крылом, построенные по схеме, показанной на рис 1.44 б, часто рассматривают как особые подклассы мультикоптеров (точнее – квадрокоптеров) – соответственно QTR UAV (Quad Tilt Rotor UAV) и QTW UAV (Quad Tilt Wing UAV). В конвертопланах со свободным крылом (Freewing) в зависимости от фазы полета отклоняются винты, создавая вертикальную или горизонтальную тягу, а крылья свободно вращаются вокруг оси, перпендикулярной фюзеляжу. Под напором воздуха, создаваемого винтами, крылья принимают вертикальное, горизонтальное или какое-либо промежуточное положение. Аппараты такой конструкции отличаются стабильностью полета [42]. На рис. 1.45 показан пример беспилотника типа Freewing.  а  б Рис. 1.45. Конвертоплан со свободным крылом – Freewing (БПЛА Spirit фирмы Flight Technologies, США): а – взлет/посадка, б – горизонтальный полет Многовинтовые вертолеты (мулътикоптеры). К этой группе относятся вертолеты, имеющие больше двух несущих винтов. Реактивные моменты уравновешиваются за счет вращения несущих винтов попарно в разные стороны или наклона вектора тяги каждого винта в нужном направлении (рис. 1.46). Беспилотные мультикоптеры, как правило, относятся к классам мини- и микро-БПЛА [65]. Существует некоторая неопределенность относительно того, являются ли мультикоптерами аппараты с двумя симметричными несущими винтами – бикоптеры. В некоторых источниках их считают подклассом мультикоптеров. По мнению авторов этой книги, лучше относить такие аппараты к уже рассмотренным вертолетам с поперечной схемой расположения винтов. Безусловно к мультикоптерам относятся аппараты, имеющие три несущих винта и более. Соответственно трехроторные мультикоптеры называют трикоптерами, четырехроторные – квадрокоптерами, шестироторные – гексакоптерами, восьмироторные – октокоптерами. |