БАС. Беспилотная авиация терминология, классификация, современное сос. Список используемых сокращений Глава Терминология и классификация
 Скачать 3.76 Mb. Скачать 3.76 Mb.
|

1.3. Беспилотные авиационные системы1.3.1. Беспилотные авиационные системы и комплексы Как уже указывалось в 1.2.1, необходимо различать понятия беспилотной авиационной системы (БАС) и беспилотного авиационного комплекса (БАК). Разница между ними заключается в том, что БАС является более широким понятием. БАК – это только совокупность материально-технических средств, необходимых для выполнения определенных функций. БАК включает один или несколько беспилотных JIA, управляющее, транспортное оборудование, технические устройства, формирующие каналы связи и передачи информации, устройства обработки информации и др. [66]. Беспилотная авиационная система (БАС) включает в себя не только авиационный комплекс, но и дополнительные компоненты, формирующие связи различного вида между его элементами (рис. 1.80). Прежде всего это технический персонал и необходимое программное обеспечение (ПО). Еще один важный элемент БАС – средства интеграции с другими системами, позволяющие объединять несколько БАК в систему с единым управлением. Также в систему следует включить совокупность необходимой технической и регламентирующей документации [64]. Как правило, БАК поставляется с предприятия-изготовителя заказчику в виде законченного комплекса, полностью готового к применению. Но при необходимости этот комплекс может расширяться и интегрироваться в другие системы за счет дополнительных аппаратных и программных средств. Например, в состав поставляемого тактического БАК могут входить: БПЛА, специальный тягач с установленной на нем стартовой катапультой, мобильный командный пункт, выносимые антенно-фидерные устройства, включая ретрансляторы сигналов. Но этот комплекс может использовать не входящие в него: спутниковую систему глобального позиционирования, вспомогательный транспорт для перевозки людей и материальных ресурсов, ангары для хранения техники, инфраструктуру аэродромов включая радиолокационные средства и т.д. (рис.1.81).  Рис. 1.80. Обобщенная структура БАС БПЛА, входящие в состав БАС и оснащенные соответствующей целевой нагрузкой, определяют ее специализацию. Среди гражданских систем наиболее распространены информационные, получающие в полете видео и фото данные, и передающие их на наземное оборудование для обработки. Для этого необходимо специализированное ПО, реализующее соответствующие алгоритмы. Стартовые и посадочные средства могут включать в свой состав транспортные машины, пусковые установки, а также аппаратуру и оборудование для пред- и послеполетного контроля БПЛА. Эта часть комплекса обслуживается техническими расчетами, входящими в состав персонала БАС.  Рис. 1.81. Взаимодействие различных элементов БАС Пункты управления, объединяющие в себе аппаратуру и оборудование для разработки программ полетов БПЛА, полетного контроля их технического состояния, радиокомандного управления выполнением полетных заданий, а также для сбора, обработки и передачи информации, функционируют с помощью расчетов управления, включающих в себя командира расчета и операторов соответствующих специализаций. Пункты управления в зависимости от масштаба возложенных на систему задач различаются по организации и исполнению. Так, для управления БПЛА стратегического и тактического назначения чаще всего применяют стационарные пункты управления (рис. 1.82). Для управления БПЛА оперативного назначения целесообразно размещать пункты управления на мобильных платформах – на автомобилях (рис. 1.83) или кораблях, а для управления легкими аппаратами небольшого радиуса действия вообще чаще всего используют носимые портативные комплекты, быстро разворачиваемые и собираемые в полевых условиях (рис. 1.84).  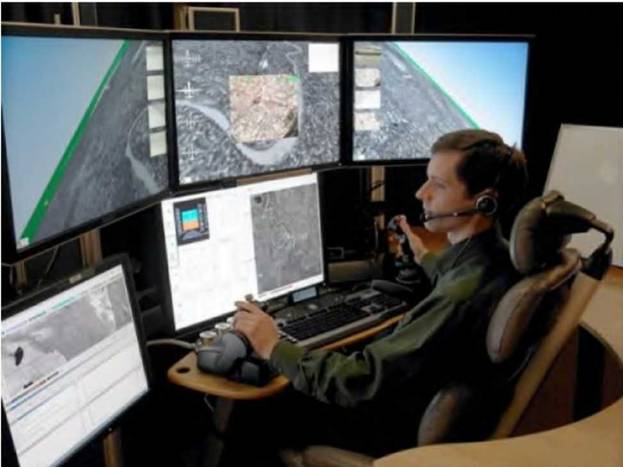 Рис. 1.82. Примеры организации рабочих мест операторов на стационарных пунктах управления БАС  а  б  в Рис. 1.83. Пример мобильного пункта управления (БАК "Дозор" – разработка ЗАО "Транзас", С.-Петербург): а – комплекс в походном состоянии; б – рабочее место пилота-оператора; в – пункт управления с развернутой антенно-фидерной системой     Рис. 1.84. Управление малыми БПЛА в полевых условиях Вспомогательные обеспечивающие средства предназначены для подготовки БПЛА к полету, обслуживания БПЛА после полета, проведения текущих регламентных и ремонтных работ, а также для хранения средств комплекса. Эта группа средств не входит в состав БАК, но обслуживается персоналом, входящим в состав технического расчета. 1.3.2. Планирование действий БАК Хотя полезная нагрузка современных БПЛА может иметь самое разнообразное назначение, основной задачей при управлении функционированием БАК является планирование траекторий полета и пилотирование БПЛА по этим траекториям. С учетом того, что БАК имеет в своем составе, как правило, не один, а два и более БПЛА, а многие небольшие комплексы (включая пункты управления) мобильны, то возникает задача планирования действий нескольких подвижных компонентов. Задачи первого типа в настоящее время хорошо проработаны, существует большое количество систем автоматического управления, управляющих как подсистемами, так и целыми БПЛА в программных и командных режимах [67]. Ко второму типу относятся принципиально иные задачи, и в первую очередь, задача планирования групповых действий мобильных объектов, суть которой заключается в определении действий каждого объекта в составе группы для достижения поставленной перед БАК цели. Один из подходов к решению такой задачи – представить весь комплекс как единый объект управления. В этом случае каждый компонент должен постоянно передавать в центральный процессорный узел (ЦПУ) информацию о своем текущем состоянии и текущем состоянии окружающей его среды [68]. На основе этой информации ЦПУ определяет текущие действия компонентов и передает команды на выполнение этих действий на их исполнительные системы (рис. 1.85, а). Такой метод реализуется в настоящее время в глобальных станциях управления. Постоянная связь между всеми компонентами осуществляется через глобальные спутниковые системы. Координаты всех управляемых БПЛА (оснащенных аппаратурой спутниковой связи) непрерывно отслеживаются, а командные сигналы управляющей платформы транслируются на них. Таким образом, созвездие спутников выступает в роли двустороннего канала связи между управляющим и управляемыми компонентами. 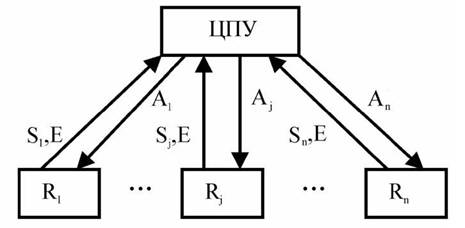 а 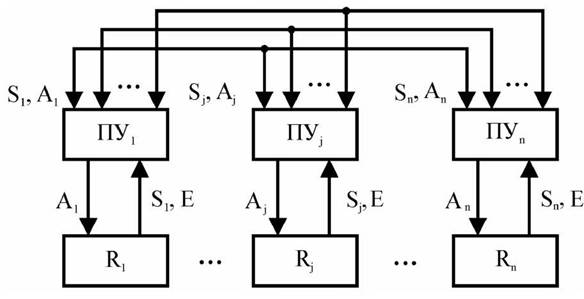 б Рис. 1.85. Варианты структур системы планирования действий БАК: а) централизованная, б) распределенная; Rj,j = 1,n – подвижные компоненты комплекса; Е – окружающая среда; Sj и Aj – вектор-функции, описывающие текущее состояние и действия j -го компонента соответственно Очевидно, что направление дальнейшего развития систем такого типа имеет преимущественно военное (государственное) значение. Соответственно, трудности решения многомерной задачи по управлению п мобильными объектами будут возложены на вычислительную машину, обладающую высочайшим быстродействием (и стоимостью), что трудно реализуемо в гражданских областях. При этом отметим так же, что сбои в работе центральной вычислительной машины или серьезные помехи, нарушающие связь объектов управления со спутниками могут повлечь за собой потерю контроля над управляемыми БПЛА. Хорошим примером является единая автоматизированная система одновременного управления несколькими типами БПЛА ZaNET, разработанная компанией ZALA AERO (г. Ижевск), обеспечивает возможность пользователю управлять множеством БПЛА с любой точки земли (рис. 1.86). Использование системы целесообразно, когда место запуска БПЛА и место получения целевой информации с борта и управление им необходимо географически разнести. ZaNET представляет собой единую автоматизированную систему управления тактическим БАК с возможностью интеграции в общую систему управления войсковыми соединениями. Платформа позволяет управлять несколькими типами БПЛА одновременно, при этом отдельная оперативная группа посредством наземной станции управления (НСУ) может получать информацию (видео/фото) от беспилотных аппаратов, выполняющих полетное задание в другом районе и управляемых с другой НСУ, централизованно анализируя поступающую информацию для принятия оперативных решений. При этом НСУ интегрируется в сеть как сервер с защищенным доступом. Все БПЛА и наземные станции управления связаны между собой посредством Ethemet-радиоканала связи. Также доступно удаленное управление БПЛА с разделением прав пользователей [69]. Другим примером является проект SMAVNET (Swarming Micro Air Vehicle Network) швейцарского института EPFL в г. Лозанне [70]. Он посвящен созданию управляемых групп согласованно работающих малых беспилотных самолетов, которые могут обмениваться информацией между собой по протоколу ZigBee (рис. 1.87). 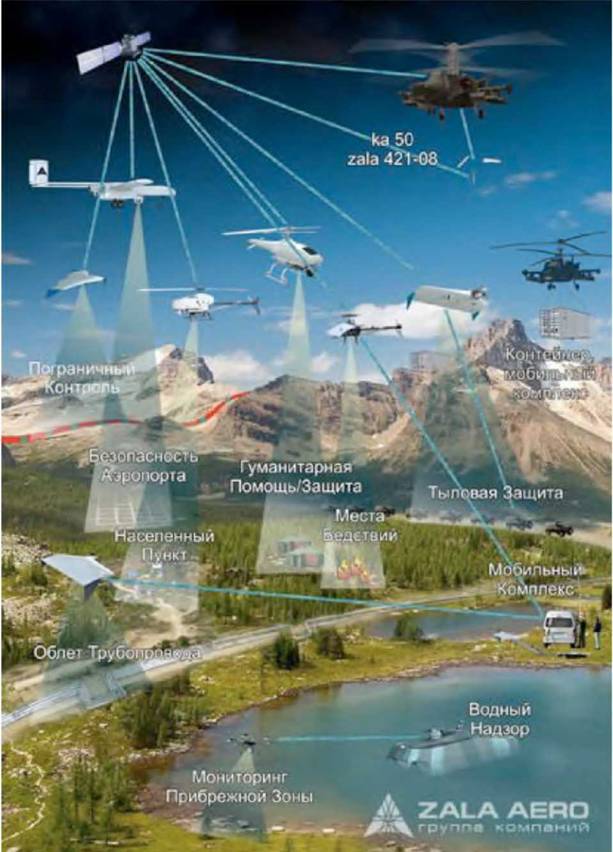 Рис. 1.86. Автоматизированная система ZaNET, предназначенная для одновременного управления несколькими типами БПЛА Управление этими летающими роботами осуществляется централизованно; т.е. с наземного пункта управления команда передается на один из БПЛА, а затем она распространяется в "стае" благодаря локальной сети. На каждом самолете установлена мобильная платформа Toradex Colibri РХА270, а в качестве операционной системы используется Linux. 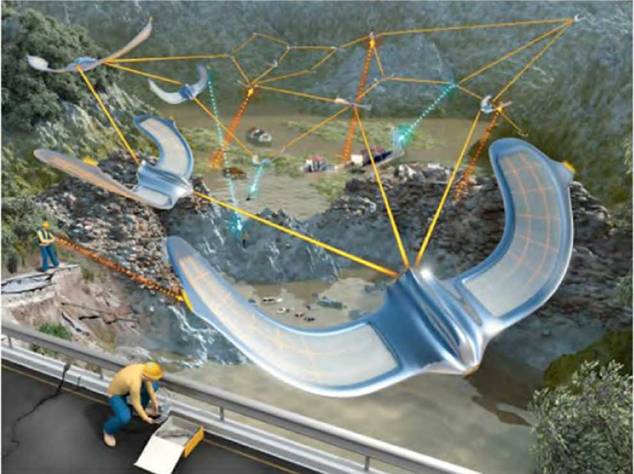 Рис. 1.87. SMAVNET – система управления "стаей" БПЛА на основе протокола ZigBee К этому же классу централизованных управляемых систем можно отнести большую часть других часто упоминаемых в иностранной литературе "стай" (swarms). Часто в таких системах функцию ЦПУ выполняет смартфон или ноутбук [71]. Подобные примеры демонстрируют наряду с самой возможностью управления несколькими малоразмерными БПЛА с помощью одного портативного устройства проблему нехватки алгоритмического обеспечения для таких групповых полетов. Существует другой подход планирования действий комплекса: каждый компонент должен самостоятельно решать задачу планирования своих действий на основе информации о текущей ситуации в среде, текущих состояниях и действиях других компонентов комплекса на небольшой интервал времени вперед [68]. Такой метод коллективного планирования действий может быть реализован с помощью распределенной (децентрализованной) системы, в которой каждый компонент Rj обладает своим процессорным узлом ПУj (рис. 1.85, б). Процессорные узлы всех компонентов комплекса связаны между собой информационными каналами по принципу «каждый с каждым», по которым передается информация о текущих состояниях Ј • остальных компонентов и выбираемых ими действиях. Такой подход ориентирован на управление группой однотипных объектов, стремящихся выполнить одну общую цель. Объединение информационно-управляющих комплексов нескольких БПЛА в единую сеть позволяет производить комплексную обработку всей получаемой информации, а распределенная структура системы повышает ее надежность [72]. Один из обязательных принципов траекторного управления такой группой состоит в соблюдении некоторых установленных дистанций между управляемыми БПЛА, как и то, что все они являются взаимозаменяемыми с точки зрения достижения поставленной перед комплексом цели. В более сложных ситуациях (различные БПЛА и закономерности их взаимодействия друг с другом) требуется более сложная система управления комплексом [73]. 1.3.3. Система управления БАК Всю систему автоматического управления авиационным комплексом (АК) можно представить в виде иерархической структуры, показанной на рис. 1.89. Здесь стрелками показаны сигналы: управляющие (сверху вниз) и информационные (снизу вверх). На рисунке показаны три уровня автоматического управления АК и модели, используемые при формировании управляющих воздействий, а также верхний уровень управления, всю работу на котором выполняет человек-оператор. Следует отметить, что оператор, как правило, имеет возможность управлять любым из низлежащих уровней, задавая: – текущую задачу для СУАК; – действие для конкретного БПЛА; – требуемое значение какого-либо параметра состояния БПЛА. При этом всю необходимую информацию о состоянии компонентов БАК (помимо визуальной из окружающего пространства) оператор получает через средства отображения информации (СОИ), как правило, входящие в состав СУАК. 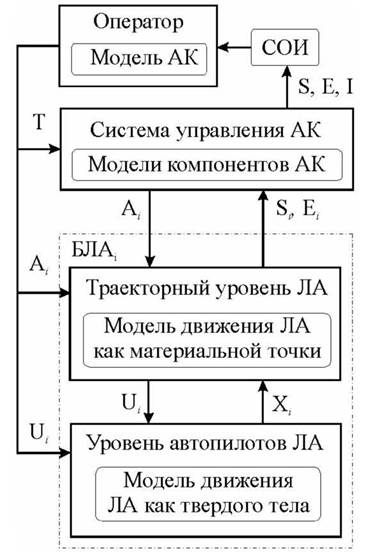 Рис. 1.89. Уровни управления авиационным комплексом На уровне оператора используется модель авиационного комплекса, включающая описание: – задач, которые способен выполнять комплекс; – условий применения и областей достижимости АК; – имеющихся ЛA, их полезной нагрузки и центральной системы управления комплексом; – коммуникаций между компонентами комплекса. Модель АК как средства для решения некоторого множества задач можно представить следующим образом: Mod (1) = {T,E,R}, (1.1) где Т =(Т1,Т2 …,Тq) – множество задач, выполняемых комплексом; Е = (Е1, Е2 ..., Ej)– параметры состояния окружающей среды (условия применения комплекса); R = (R1,R2 ,…,Rn ) – множество компонентов, составляющих АК: ЛA, взлетно-посадочные устройства; устройства связи и управления. На этом уровне решаются следующие задачи: – назначение задачи сеанса функционирования АК; – назначение конкретных ЛA для использования; – обозначение основных ограничений и дополнительных условий. Критерием качества управления на этом уровне может служить способность БАК выполнить поставленную задачу (совокупность задач) в определенных условиях за ограниченное время (t ‹= tзад ) I(1) = {T,E,t}. Система управления АК может иметь различное базирование [66], но наземное расположение является самым простым и распространенным. На этом уровне используются модели описания: – ЛA в составе комплекса, их основных ЛTX и функциональных возможностей, а также динамических характеристик других подвижных компонентов; – назначенной задачи сеанса функционирования комплекса; – количества ЛA, а также степень возможной замены одних компонентов (например, вышедших из строя) другими. Модель АК как совокупности разнородных компонентов, решающих свои собственные задачи в рамках общей стоящей перед комплексом цели можно представить следующим образом: Mod(2) = {S,A,J,E}, (1-2) где S = (S1,S2 ,…,Sn ) – множества параметров состояний компонентов комплекса, прежде всего координат их местонахождения; A = (A1 ,A2 ,…,An) – множества действий компонентов, включая алгоритмы решения типовых задач из множества Т; J = (J1,J2 ,…,Jn ) – множества, характеризующие каждый компонент в качестве исполнителя подзадач из множества Т. При этом необходимо учесть летно-технические характеристики имеющихся БПЛА и их целевой нагрузки для выполнения конкретной задачи [74]. Решаемые задачи: – построение решения поставленной перед АК задачи в виде совокупности подзадач, решаемых каждым ЛА в составе комплекса; – составление плана полета для каждого ЛA, а также перечня действий в определенных точках с учетом топливновременных ограничений; – согласование движения нескольких ЛА в составе АК, если это необходимо. Критерий качества управления на этом уровне можно сформулировать как оценку решения каждым БПЛА поставленной перед ним задачи с определенным уровнем эффективности: I(2) = {T,J} Следующие два уровня реализуются непосредственно на борту ЛА. Соответственно, перечисленные ниже характеристики могут иметь количественные различия в зависимости от типоразмера и выполняемой ЛА задачи. Траекпгорный уровень управления содержит подробное описание движения ЛА, в том числе и возможный разброс значений основных параметров при их выполнении. Таким образом, модели этого уровня содержат следующие сведения: – математическое описание пространственного движения ЛА как материальной точки; – предельные значения скоростей и эйлеровых углов при выполнении типовых маневров; – требования к точности выдерживания заданной траектории; – требования к выдерживанию определенных дистанций между несколькими одновременно выполняющими полет ЛА. Модель компонента АК (летательного аппарата), как материальной точки, выполняющей определенные действия в окружающей среде, можно представить следующим образом: Mod(0) = {Sj ,Aj ,E}, (1.3) где Sj=(s1j,s2j,…,smj ) – параметры состояния компонента Rj , j = 1,n т – количество переменных, описывающих состояние компонента; Aj =(a1j,a2j,…,ahj ) – действия, которые может выполнять компонент комплекса Rj для изменения окружающей среды и собственного состояния; h – количество таких действий. Решаемые задачи: – расчет конкретных значений параметров типовых участков траекторий исходя из ЛTX ЛA и специфики решаемой задачи; – предотвращение опасных сближений и потерь ЛА; – обеспечение выполнения запланированных действий на каждом участке траектории. Эффективность управления на этом уровне можно сформулировать как отработку заданных действий за заданное время с заданной точностью (Q): I(3) = {A,Q,t}. На нижнем уровне управления обеспечивается отработка всех действий ЛА, рассчитанных на траекторном уровне. Соответственно, модель этого уровня содержит: – математическое описание пространственного движения ЛА как твердого тела; – законы управления отдельными параметрами движения ЛА; – предельные значения некоторых величин, подлежащих ограничению. Модель ЛА, как объекта управления, можно представить в следующем виде: Mod(4) = {Uj,Xj,Sj} (1.4) где Uj – множество управляющих воздействий; Xj – множество выходных параметров. Решаемые задачи: – формирование управляющих воздействий, передающихся для отработки в САУ; – ограничение предельных значений заданных величин. Задачи этого уровня решаются традиционными методами теории автоматического управления, поэтому качество их решения может быть выражено показателями качества переходных процессов всех задействованных САУ: I(4) = {?,tрег,?}, где ? – перерегулирование; tрег – время регулирования; ? – статическая точность. Источники информации по главе 1: 1. Портал новостей по аэрокосмической и оборонной тематике. http: // www.shephardmedia.com/news/uv-online 2. The Free Dictionary http://www . thefreedictionary. com/Unmanned+Aerial+ Vehicle 3. Международный портал по беспилотным системам UVS-info. http://www . uvs-info. com 4. Fitzpatrick B.G. Max Plus Decision Processes in Planning Problems for Unmanned Air Vehicle Teams // Recent Advances in Research on Unmanned Aerial Vehicles / Fahroo F. et al. (Eds.). Springer-Verlag, Berlin, Heidelberg, 2013.-P. 31. 5. Marks P. From sea to sky: Submarines that fly. 05 July 2010 // Портал New Scientist, http://www.newscientist.eom/article/mg20727671.000-from-sea- to-sky-submarines-that-fly. html#. Ud2xGqxzcba 6. Transforming unmanned aerial-to-ground vehicle/ US Patent 8205820. Publ. Jun 26, 2012. 7. Yamauchi B., Rudakevych P. Griffon: A Man-Portable Hybrid UGV/UAV // Industrial Robot, vol. 31, no. 5, pp. 443-450, 2004. 8. Ijspeert A.J., Crespi A., Ryczko D., Cabelguen J.-M. From Swimming to Walking with a Salamander Robot Driven by a Spinal Cord Model // Science, 9, March 2007. – Pp. 1416-1420. 9. Bento M. Unmanned aerial vehicles: an overview // Inside GNSS. – 2008. – №1. – P. 54-61. http://www.insidegnss.com/auto/janfeb08-wp.pdf 10. Зинченко O.H. Беспилотный летательный аппарат: Применение в целях аэрофотосъемки для картографирования // Сайт компании "Ракурс". http://www . racurs. ru/wwwdownload/articles/UA V1 .pdf 11. Заблотский А., Ларинцев Р. БПЛА: первое знакомство // Авиация и время. – 2008. – №2 // Онлайн-библиотека Litrus.net. http.V/litrus . net/book/read/164811?р=15 12. Житомирский Г.И. Конструкция самолетов. – 2-е издание . – М.: Машиностроение, 1995. 13. Сайт "Военное обозрение", http://topwar.ru/8293-bespilotnyy-ucas- x-47b-smert-v-lyuboy-ugolok-planety.html 14. Сайт "Самолёты вертикального взлёта и посадки". http://p-ln . ru/sitemap. html 15. Ружицкий Е.И. Европейские самолеты вертикального взлета. – М.: ООО "Издательство Астрель", 2000; ООО "Издательство ACT", 2000 (Популярное издание. Серия "Современная авиация") 16. Википедия. Самолет вертикального взлета и посадки https ://ru.wikipedia.org/wiki/CaMone meepmuKanbHozo 63nem au nocadKu 17. AeroVironment Glossary / SkyTote. http://www . avinc. com/glossary/sky tote 18. Kim G.-H., Jeong Y.-D., Park S.O. Measurement and prediction of control vane force in the wake of a shrouded propeller system // Proceedings of the 27™ International congress of the aeronautical sciences, 19-24 Sept., Nice, France.- P. 1-7. http://www . icas. org/ICASARCHIVE/ICAS2010/PAPERS/265.PDF 19. Proof of Flight – Development of a Tailsitter UAV for UAVForge competition. http.V/www.youtube . com/watch ?v=vP4FVLK4sdw 20. Авиация: Энциклопедия / Гл. ред. Г.П. Свищев. – М.: Большая Российская Энциклопедия. 1994. 21. Скоренко Т. Окольцованный самолет: кольцеплан // Интернет- портал "Популярная механика". http://www.popmech.ru/article/6825-okoltsovannyiy-samolet 22. Уголок неба: авиационная энциклопедия. http: //www. airwar. ru/enc/attack/av8. html 23. Создан тяжелый беспилотник для боев в городе // Интернет-издание CNews. http://www . cnews.ru/newtop/index.shtml?2006/l 0/06/213068 24. Franchi P. Mystery surrounds new BattleHog close air support vertical take-off and landing UAV and its creators American Dynamics. 11 Sep 2006 // Новостной портал Flight Global. http://www.flightglobal.com/news/articles/mystery-surrounds-new-battlehog- close-air-support-vertical-take-offand-landing-uav-and-its-creators-american- dynamics-208932 25. Сайт компании Aurora Flight Sciences. http://www . aurora. aero/Media/Gallery/Excalibur. aspx 26. Сайт компании Frontline Aerospace http://frontlineaerospace.com/sites/default/files/pdfs/VSTARGuideweb24.pdf 27. Популярная библиотека физических эффектов. Эффект Коанда. http.V/magicinventions . com/phisics/koandy-effect. html 28. Сайт British Aviation – Projects to Production. http://britishaviation-ptp . com/aesir. html 29. CoppingerR. Aesir unveils Hoder UAV for resupply missions. 30 Jul 2009 // Новостной портал Flight Global. http://www.flightglobal.com/news/articles/aesir-unveils-hoder-uav-for-resupply- missions-330339 30. Сайт компании Atair Aerospace, http://www.atair.com/leapp 31. Беспилотный мотодельтаплан ШАХИД-1. http ://ru.similarsites. com/goto/swd4w. narod2. ru 32. Сайт компании Prioria Robotics, http://www.prioria.com 33. Богданов Ю.С., Михеев P.А., Скулков Д.Д. Конструкция вертолетов. – М.: Машиностроение, 1990. – 272 с. 34. The GBA Gyrodyne Concept. http://www.groenbros.com/gyrodynetech.php 35. Википедия. Автожир, http://ru.wikipedia.org/wiki/Автожир 36. Русскоязычный форум по автожирам, http://rotorcraft.unoforum.ru 37. Братухин И. П. Автожиры. Теория и расчёт. – Госмашметиздат, 1934. – 110 с. http://twistairclub.narod.ru/bratgyro/contens.htm 38. Жабров А. А. Автожир и геликоптер. – 2-е изд. – ЦС ОСОАВИАХИМа СССР, 1939. http://twistairclub.narod.ru/zabrov/index.htm 39. Сайт компании "Рустехресурс". http://www.rustrain3d.ru/avtozhirhimik.shtml 40. Спицын В. Что такое конвертоплан? // Сайт "Город Воркута". http: //www. vorcuta. ru/articles-transportaerol. htm 41. Сайт компании American Dynamics Flight Systems. http://www.adflightsystems.com/Gallery.shtml?igid=10036 42. Сайт компании Flight Technologies, http://freewing.net/index.html 43. Abdul Razak N., Dimitriadis G. Flapping Flight Aerodinamics for flying animals. http://orbi . ulg.ac. be/bitstream/2268/100998/1/Presentation 1 .pdf 44. Harvard Microrobotics Laboratory. Research overview. http://micro.seas . harvard, edu/research. html 45. Арие М. Я. Дирижабли – Киев: Наук, думка, 1986. – 264 с. http://publ . lib. ru/ARCHIVES/A/ARIEMihailYakovlevich/ArieM. Ya.. html 46. Сайт компании Skyship Services, http://www.skyshipservices.com 47. Сайт компании "Локомоскай". http://www . locomosky. ru/presscenter/massmedia/89 48. Сайт ОАО "Долгопрудненское конструкторское бюро автоматики". http://www.dkba.ru 49. Сайт компании Ohio Airships, http://www.dynalifter.com/index.html 50. Сайт Содружества авиационных экспертов Aviation Explorer. http://www.aex.ru/docs/3/2012/11/19/1673/print 51. Сайт компании Nimbus. http://www.nimbus.aero/archive/Home.html 52. Сайт компании Lockheed Martin. http://www . lockheedmartin. com/us/products/p- 791.html 53. Arjomandi M. Classification of unmanned aerial vehicles: Techn. overview. The Univ. of Adelaide, Australia. 2011. http://personal.mecheng.adelaide.edu.au/maziar.arjomandi/Aeronautical%20En gineering%20Projects/2006/group9.pdf 54. Blyenburgh P. UAVs – Current Situation and Considerations for the Way Forward // Defense Technical Information Center, Paris, France. 2000. Compilation Part Notice ADP010752. – 27 p. http://ftp.rta.nato.int/public/PubFulltext/RTO/EN/RTO-EN-009/EN-009-01.pdf 55. Blyenburgh P.: Unmanned Aircraft Systems. The Current Situation// EASA Workshop on UAV, EASA, 2008. http://www . easa. europa. eu/ws prod/g/doc/Events/2008/February/l – Overview%20of%20the%20UA V%20Industry%20%28UVS%29 .pdf 56. Белкин В., Мельник П. Беспилотные боевые самолеты и боевая авиация 6-го поколения. – Серия статей в ж-ле "Авиапанорама", № 6, 2008, №№ 1-3, 2009 и в Интернет-издани "UAV.ru – Беспилотная авиация". http://aviapanorama.su/2008Zl l/bespilotnye-boevye-samolety-i-aviaciya-6-gopokoleniya; http://aviapanorama.su/2009/02/bespilotnye-boevye-samolety-i-boevayaaviaciya-6-go-pokoleniya; http://aviapanorama.su/2009/04/bespilotnye-boevye-samolyoty-i-boevaya- aviaciya-6-go-pokoleniya; http://aviapanorama.su/2009/05/boevye-bespilotnye-samolety-i-boevaya- aviaciya-6-go-pokoleniya; http://uav.ru/articles/ 6gen .pdf 57. Россия начинает разработку боевого беспилотника на базе истребителя пятого поколения ПАК-ФА Т-50 // Новостной Интернет-ресурс DailyTechlnfo, 4 сентября 2013 / Военные технологии. http: //www. dailytechinfo. org/military/5143-rossiya-nachinaet-razrabotku- boevogo-bespilotnika-na-baze-istrebitelya-pyatogo-pokoleniya-pak-fa-t-50.html 58. Everaerts J., Lewyckyj N., Fransaer D. Pegasus: Design of a stratospheric long endurance UAV system for remote sensing // Proc. of XXXV Congress of International Society for Photogrammetry and Remote Sensing. http://www.isprs.org/proceedings/XXXV/congress/comm2/papers/93.pdf 59. Сайт компании Aurora Flight Sciences. http://www . aurora. aero/Media/Gallery/MarsFlyer. aspx 60. Blyenburgh, P. (ed.) The Global Perspective 2011/2012 // Proceeding of the Annual UAS Conference, 9th edition, Blyenburgh amp; Co, Paris, 2011. 61. Российский сайт о ракетной технике и технологии MISSILES.RU. http: //www. missiles. ru/UA Vjclass. htm 62. Blyenburgh P. RPAS: The European Approach // Proceedings of RPAS Symposium, FH-Johanneum, Graz, Austria – 28 May 2013. http://uvs-info.com/phocadownload/0 22ck FH-Johanneu mRPAS Symposium/1 van-Blyenburgh RPAS-EuroApproach 13052 8 V2 .pdf 63. Дружинин E.A., Яшин C.A., Крицкий Д.Н. Анализ влияния функционального назначения и зон применения на структуру и характеристики безопасных к использованию в воздушном пространстве БАК // Открытые информационные и компьютерные интегрированные технологии. – 2012. – № 54. – С. 60-67. http: //archive, nbuv.gov. ua/portal/natural/vikit/2012 54/р60-67 .pdf 64. Ростопчин В.В. Современная классификация беспилотных авиационных систем военного назначения // Интернет-издание UAV.ru – Беспилотная авиация, http://uav.ru/articles/bas.pdf 65. Сайт о мультикоптерах. http://multicopter.ru/microcopter 66. Моисеев В. С., Гущина Д. С., Моисеев Г. В. Основы теории создания и применения информационных беспилотных авиационных комплексов: Монография. – Казань: Изд-во МОиН РТ. – 2010. – 196 с. (Серия «Современная прикладная математика и информатика»), 67. Салычев О. С. Автопилот БПЛА с Инерциальной Интегрированной Системой – основа безопасной эксплуатации беспилотных комплексов. http://www.teknol.ru/trash/uavautopilotsalychev2602182965.pdf 68. Интеллектуальные роботы: учебное пособие для вузов / под общей ред. Е. И. Юревича / И. А. Каляев, В.М. Лохин, И. М. Макаров и др. – М.: Машиностроение, 2007. – 360 с. 69. Система ZANET – Группа компаний ZALA AERO http://zala . aero/ru/uavs/1284015065. htm 70. Hauert S., Leven S., Zufferey J.-C., Floreano D. The Swarming Micro Air Vehicle Network http://lis2 . epfl. ch/CompletedResearchProjects/SwarmingMA Vs 71. Drone Swarm: Networks of Small UAVs Offer Big Capabilities. http://www.defensenews.com/article/20130612/C4ISR/306120029/Drone- Swarm-Networks-Small- UA Vs-Offer-Big-Capabilities 72. Бабиченко A.B., Бражник В.М., Герасимов Г.И., Горб B.C., Гущин Г.М., Джанджгава Г.И., Кавинский В.В., Негриков В.В., Орехов М.И., Полосенко В.П., Рогалев А.П., Семаш А.А., Шелепень К.В., Шерман В.М. Патент РФ на изобретение № 2232102. Распределенный информационно- управляющий комплекс группы многофункциональных летательных аппаратов. Заявка: 2003130782/11, 21.10.2003; опубликовано: 10.07.2004. 73. Неугодникова Л. М. Распределенная система управления гражданским беспилотным авиационным комплексом // Авиакосмическое приборостроение. – 2013,- № 11. – С. 50-58. 74. Ростопчин В. В Элементарные основы оценки эффективности применения беспилотных авиационных систем для воздушной разведки. // Интернет-издание UAV.ru – Беспилотная авиация. http://uav.ru/articles/basicuavefficiency.pdf Глава 2. Обзор современного мирового рынка беспилотных авиационных систем 2.1. Распределение мирового рынка БАС В отличие от других оборонных рынков со сравнительно невысокой динамикой, рынок беспилотных систем меняется достаточно быстрыми темпами и демонстрирует значительный рост. Армиями многих стран мира на вооружение каждый год принимается огромное число беспилотных летательных аппаратов, автоматически управляемых наземных машин, роботизированных подводных аппаратов и беспилотных катеров. За последние пять лет интерес оборонных заказчиков к беспилотным системам значительно вырос, что привлекло на этот рынок сотни поставщиков, предлагающих не только готовые платформы, но и разнообразные программные продукты, датчики, коммуникационные решения и т.д. Сектор БПЛА считается самым крупным и наиболее зрелым сегментом рынка беспилотных систем. В оборонной отрасли найдётся очень немного технологических направлений, по которым в последние годы был достигнут столь же значительный прогресс. БПЛА проделали действительно большой путь: от простейших дронов, использовавшихся преимущественно для наблюдения, до передовых летающих оружейных комплексов, способных обнаруживать, сопровождать и поражать цели при участии оператора, находящегося за тысячи километров от места событий. В настоящее время к основным задачам БПЛА относятся разведка, наблюдение и сбор информации (Intelligence, Surveillance, and Reconnaissance – ISR), а также нанесение высокоточных ударов. Однако набор задач, которые могут решать военные БПЛА, гораздо шире, не говоря уже о гражданских применениях. Так, например, список типов БПЛА из портфеля заказов Министерства обороны США довольно разнообразен и продолжает расширяться (рис. 2.1) [1]. По оценкам Центра анализа мировой торговли оружием (г. Москва), в 2012-2015 гг. объем мирового экспорта БПЛА составит более 5 млрд. долл. (1,8 % от прогнозируемого объема продаж всех типов вооружений и военной техники). Для сравнения: в 2004-2011 гг. объем мировых продаж БПЛА составлял 3,52 млрд. долл. (1 % мирового рынка вооружений), в том числе 0,784 млрд. долл. в 2004-2007 гг. и 2,735 млрд. долл. в 2008-2011 гг. 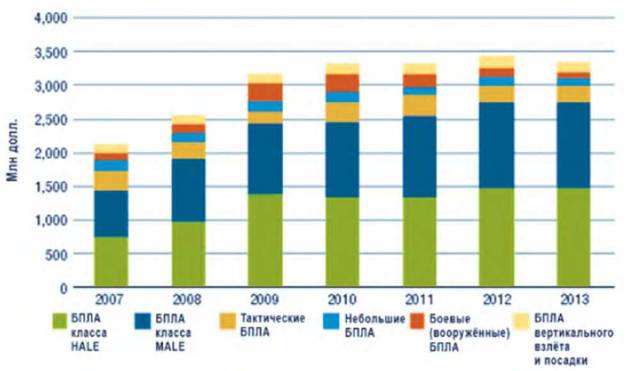 Рис. 2.1. Затраты Министерства обороны США на беспилотные аппараты разных типов Примерно 80 % от суммы продаж БПЛА приходится на беспилотные платформы, способные к долговременным полётам на больших (High Altitude Long Endurance – HALE) и средних (Middle Altitude Long Endurance – MALE) высотах. Причем беспилотники классов HALE и MALE нужны не только военно- воздушным силам. Так, в США ощутимый вклад в рост сегмента БПЛА дала программа BAMS (Broad Area Maritime Surveillance – морская разведка больших акваторий), реализуемая под эгидой ВМФ США, а также самолёт увеличенного радиуса действия ERMP (Extended Range, Multi Purpose), разрабатываемый для армии США. Как можно видеть, БПЛА, способные совершать длительные полёты, востребованы в разных родах войск. Рост спроса наблюдается не только на платформы типа MALE и HALE, но и на малые и тактические БПЛА. В 2013 году полные затраты Министерства обороны США по двум последним направлениям составили около 12 % от общей суммы закупок БПЛА. К небольшим беспилотным самолётам "обычного" (невертикального) взлёта и посадки относятся, в частности, системы RQ-11 Raven В, производимые компанией AeroVironment, и аппараты RQ-7 Shadow 200 компании AAI Corporation. Ещё один класс беспилотных летательных аппаратов, который постоянно закупается оборонным ведомством Соединённых Штатов – это платформы вертикального взлёта и посадки (Vertical Take Off and Landing – VTOL). По сравнению с другими воздушными беспилотниками, такие летательные аппараты обладают рядом преимуществ, которые особенно ярко проявляются в двух случаях: при ведении боевых действий в населённых пунктах и при базировании J1A на кораблях. В качестве примеров можно назвать платформу MAV (Micro Air Vehicle) компании Honeywell, принятую на вооружение в ограниченных количествах и которую, в частности, использовали для поиска самодельных взрывных устройств в иракских городах, а также беспилотный летательный аппарат корабельного базирования MQ-8B Fire Scout, созданный компанией Northrop Grumman. К классу БПЛА вертикального взлёта и посадки относятся также система Fire Scout, разрабатывающаяся для ВМФ и армии США, и ряд менее известных платформ, в том числе А-160 Hummingbird корпорации Boeing и аппараты серии GoldenEye компании Aurora Flight Sciences, оснащающихся импеллерами [1]. По данным на 2013 г., в разработке, серийном производстве и эксплуатации находились БПЛА почти 1000 различных типов. Их разработкой и производством занимались около 300 фирм в 60 странах мира. Все эти страны можно условно разделить на три группы. В первую входят добившиеся наибольших успехов в области создания БПЛА. Это – США, Израиль, Франция, Великобритания, Россия и Германия. Во вторую группу входят страны, активно занимающиеся проблемой беспилотных аппаратов и заметно в этом преуспевшие: Австралия, Индия, Иран, Испания, Италия, Канада, КНР, Швейцария, Швеция, ЮАР, Южная Корея и Япония. Наконец, третья группа объединяет страны, где тематика БПЛА лишь начинает зарождаться: Австрия, Алжир, Аргентина, Бельгия, Болгария, Бразилия, Голландия, Греция, Дания, Египет, Иордания, Ирак, Ливия, Малайзия, Мексика, Новая Зеландия, Норвегия, ОАЭ, Оман, Пакистан, Польша, Португалия, Саудовская Аравия, Сербия, Сингапур, Таиланд, Тайвань, Тунис, Турция, Украина, Филиппины, Финляндия, Хорватия, Чехия, Шри Ланка и др [2]. Работы по БПЛА координируются и финансируются в ряде случаев государственными структурами. Например, в США за программы исследований и разработки перспективных БПЛА отвечают Управление совместных программ разработки крылатых ракет и беспилотных летательных аппаратов (ЛЮ) и Управление воздушной разведки при Министерстве обороны (DARO), где формируются концепции и облик перспективных беспилотных систем различного назначения. Активную роль, включая финансирование, играет DARPA – Управление перспективных исследований при Министерстве обороны США. Большую роль в создании БПЛА государство играет во Франции, Израиле, Китае и других странах. Кроме того, в Европе ряд проектов осуществляется в рамках международного сотрудничества. Характерным примером государственного подхода к развитию БПЛА является подготовленная в августе 2005 г. Министерством обороны США долгосрочная комплексная программа, рассчитанная до 2030 г. Она носит название "Дорожная карта развития БПЛА: 2005-2030 гг.". Лидерство в разработке и производстве БПЛА сейчас уверенно удерживают США [3]. Но в последние несколько лет на рынке БПЛА возросла активность европейских фирм. Сейчас они занимаются разработкой и серийным производством более чем 200 моделей БПЛА. По этому показателю европейцы даже немного превзошли американцев (правда, следует учесть, что некоторые европейские БПЛА являются доработанными американскими изделиями). В Европе создаются практически все типы современных БПЛА (от микро-БПЛА до ББС, но не все они выпускаются серийно). Многие европейские разработки последних лет являются сильными конкурентами на мировом рынке и в экспортном плане начинают вытеснять американские БПЛА. Следует, отметить, что по уровню используемых технологий европейские БПЛА несколько отстают от американских, зато с точки зрения стоимости они более привлекательны для покупателей. Ведущими разработчиками БПЛА в Европе являются концерн EADS и фирмы Alcore Technologies (Франция) и Rheinmetall (Германия). На их долю приходится 25 % всех работ в области БПЛА. Есть еще ряд фирм, которые приближаются к этой тройке. Согласно анализу, проведенному американской консалтинговой компанией Teal Group, Европа вышла на второе место в мире по объему продаж БПЛА и уступает только США по объему НИОКР, обладая 20 % долей затрат в общемировом рынке [2]. Основные работы в Европе в области БПЛА сосредоточены во Франции, где они ведутся как по национальным программам, так и по общеевропейским. Созданные во Франции различные беспилотники активно применялись во время событий на Балканах в конце 1990-х гг. В настоящее время французские БПЛА (например, Sagem Sperwer) успешно несут военную службу в Ираке и Афганистане. Концерн EADS участвует в программе разработки разведывательного аппарата Eagle 1, предназначенного для продолжительных полетов на средних высотах (7000-8000 м), а также высотных аппаратов HALE, способных в течение 24- 36 ч летать на высоте около 18000 м. Фирма Dassault Aviation специализируется на разработке ББС. Вместе с фирмами Швеции, Швейцарии, Греции и Испании она осуществляет программу создания демонстрационного ББС nEUROn, на базе которого может появиться серийный ББС для Вооруженных сил Франции и ряда европейских стран. Другим важным игроком на европейском рынке является Германия. В свое время беспилотниками занималась фирма Domier, вошедшая в состав концерна EADS. Созданный ею совместно с Канадой и Францией разведывательный скоростной БПЛА CL-289 широко применялся в 1990-х гг. над Боснией и Косово. Входящие в состав концерна EADS немецкие фирмы участвуют в создании ряда европейских проектов БПЛА, главным из которых является EuroHawk, который должен войти в состав перспективной европейской системы радиоэлектронной разведки. Немецкая фирма ЕМТ спроектировала разведывательный БПЛА LUNA Х-2000, который, по некоторым сведениям, применяется в Афганистане. Фирма STN Atlas Electronic занимается выпуском разведывательных аппаратов KZO (Вrevel). Расширяются исследования в области БПЛА в Италии. Основные работы сосредоточены в фирме Alenia и ее дочернем предприятии Galileo Avionica. В стенах этих компаний в последнее время были созданы аппараты Falco и Nibbio. Огромным потенциалом в области создания БПЛА обладает Великобритания. Достаточно сказать, что в этой стране беспилотниками занимаются 14 фирм, ведущих работы по 35 проектам. Здесь наиболее активна фирма BAE Systems, занимающаяся созданием самых различных БПЛА, в том числе и ББС. Английская частная научно-исследовательская фирма QinetiQ исследует различные опытные беспилотные аппараты с альтернативными источниками энергии. Уже проведены успешные летные испытания БПЛА Zephyr, оснащенного силовой установкой на солнечной энергии. Показано, что такой аппарат может находиться непрерывно в воздухе 90 суток и более. Большое внимание уделяют беспилотникам в Швеции, где фирма SAAB участвует в исследованиях ББС. С ее помощью были созданы и переданы на летные испытания демонстрационные БПЛА SHARC и FILUR, на которых специалисты отрабатывают конструктивные решения и технологии, необходимые для будущего ББС. Ведутся работы над беспилотными вертолетами. В будущем Европа планирует сократить технологическое отставание от США. С этой целью в рамках Евросоюза была разработана перспективная концепция развития БПЛА на период до 2020 г., во многом напоминающая американскую "Дорожную карту". Европейская концепция состоит из двух разделов. Весной 2005 г. был опубликован ее первый раздел, касающийся развития исследований в области гражданских БПЛА. В конце 2006 г. в Европейском оборонном агентстве (EDA) выработали аналогичный документ, но посвященный военным БПЛА. Если гражданская концепция достаточно подробно раскрывается, то военная пока носит закрытый характер. Тем не менее, известно, что в ней предусматриваются исследования, направленные на создание высокоэффективных военных БПЛА, относительно дешевых и использующих передовые технологии [2]. В настоящее время США занимают лидирующие позиции на рынке крупногабаритных БПЛА большой продолжительности и высоты полета (HALE) со своим аппаратом Global Hawk, который в перспективе планирует использовать НАТО. Вряд ли на этот рынок смогут внедриться европейские компании. А вот конкуренция на рынке средневысотных БПЛА средней продолжительности полета (MALE) обещает быть очень ожесточенной в перспективе. На лидерство в этом секторе претендует прежде всего европейский концерн EADS. Интересно, как видится положение в области разработок и производства беспилотных авиационных систем из России (рис.2.2). По оценкам специалистов "Рособоронэкспорта", ведущее положение по объему производства и широте ассортимента предлагаемой беспилотной авиатехники занимают США – на их долю приходится порядка 32,5 %. В тройке лидеров также Израиль и Франция. Далее следует Великобритания с 5,6 %. Россия, где производится 5,5 % беспилотников, – на пятом месте. Замыкают десятку Италия, Испания, Германия, Иран и Китай. В последние годы стремительно развивают свой потенциал в этом направлении Украина, Индия, Южная Корея, Финляндия, Иордания, Швеция, Тунис, Иран, Сингапур [4]. 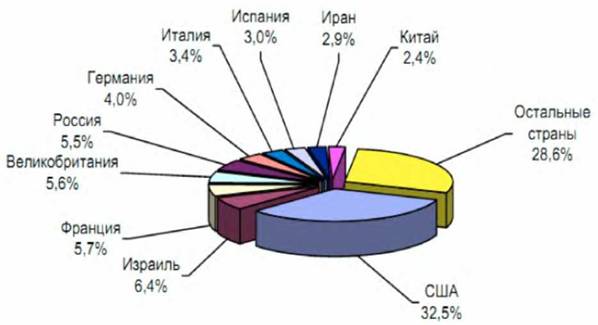 Рис.2.2. Десятка ведущих стран – разработчиков и производителей систем БПЛА по версии "Рособоронэкспорта" 2.2. Ассоциация UVS International  Координацию усилий различных разработчиков и производителей беспилотных систем (и, в частности, БАС) осуществляет международная ассоциация UVS International (AUVSI). UVS International – некоммерческая организация, зарегистрированная в Торговой палате в Гааге, Нидерланды. Она представляет производителей дистанционно управляемых систем (RPS), связанных подсистем, компонентов и вспомогательного оборудования, а также исследовательские институты и академии. UVS International включает более чем 250 корпораций, институтов и академий в 40 странах, расположенных на пяти континентах. Вот эти страны:
UVS International первоначально начала свое действие как европейская организация EURO UVS, которая была образована в июне 1995. EURO UVS сначала функционировала как свободная федерация корпоративных членов без какой-либо официальной юридической структуры [5]. В мае 1998 она была зарегистрирована в Париже как ассоциация. Быстро стало очевидно, что французские управляющие ассоциации не позволят работать ей в желаемом направлении. Было решено перерегистрировать ассоциацию с тем же именем и перебазироваться в Нидерланды, что и было сделано в январе 2000 г. В начале декабря 2003 г. Генеральная Ассамблея организации решила единодушным голосованием изменить устав EURO UVS, предоставляя избирательные права всем корпоративным членам, независимо от страны, в которой они находятся, и переименовать организацию в UVS International. В феврале 2004 г. EURO UVS окончательно изменила свое имя на UVS International и новый устав ассоциации вступил в силу. Новый устав теперь разрешает корпоративным представителям всех стран (кроме тех, которые находятся в черных списках ООН и Европейского союза) представлять свою кандидатуру на место в совете директоров ассоциации. Устав ассоциации может быть найден на сайте www.uvs-international.org [5]. |