БАС. Беспилотная авиация терминология, классификация, современное сос. Список используемых сокращений Глава Терминология и классификация
 Скачать 3.76 Mb. Скачать 3.76 Mb.
|

Рис. 1.46. Различные схемы построения мультикоптеровQuadCopters:  TriCopter 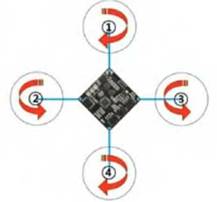 +Copter 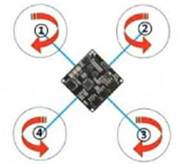 XCopter  Y4Copter  HexaCopter 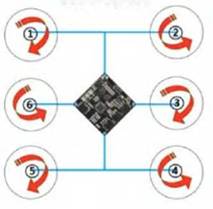 H6Copter  Y6Copter  OctoCopter  Butte rflyCopter TwinQuadCopter Трикоптер – самая простая схема построения мультикоптеров. Обычно трикоптер движется двумя винтами вперед, а третий является хвостовым. Первые два винта имеют противоположные направления вращения и взаимно компенсируют реактивные закручивающие моменты, у хвостового же винта пары нет, поэтому для компенсации его реактивного момента ось вращения этого винта немного наклоняют в сторону, противоположную направлению закручивания. Это делают с помощью специального сервопривода и тяги (рис. 1.47), которые используются для стабилизации или управления положением аппарата по курсу.   Рис. 1.47. Трикоптер и сервопривод отклонения его хвостового ротора Однако существуют производные от трикоптера схемы построения, в которых отсутствуют механически подвижные части, и корпуса всех двигателей жестко зафиксированы на своих местах. Причем один (в У4-коптере) или все три двигателя (в Y6- коптере, рис. 1.48) имеют симметричные им относительно горизонтальной плоскости двигатели с толкающими винтами, направленными вниз. Управление курсовым углом и направлением перемещения осуществляется за счет изменения соотношения частот вращения винтов.  Рис. 1.48. У6-коптер Квадрокоптер (quadcopter, quadrotor) – самая распространенная схема построения мультикоптеров. Наличие четырех жестко зафиксированных роторов дает возможность организовать довольно простую схему организации движения. Существуют две таких схемы движения: схема "+" и схема "х" (рис. 1.46). В первом случае один из роторов является передним, противоположный ему – задним, и два ротора являются боковыми. В схеме"х" передними являются одновременно два ротора, два других являются задними, а смещения в боковом направлении также реализуются одновременно парой соответствующих роторов. Алгоритм управления частотами вращения винтов для схемы "+" несколько проще и понятнее, чем для схемы "х", однако последняя используется все же чаще из-за конструктивных преимуществ: при такой схеме проще разместить фюзеляж, который может иметь вытянутую форму, бортовая видеокамера имеет более свободный обзор. То, каким образом квадрокоптер совершает элементарные маневры, понятно из рис. 1.49. Иллюстрация приведена для случая схемы "+". Из рисунка видно, что одна пара винтов вращается по часовой стрелке, другая – против. Если частоты вращения пар одинаковы, то аппарат неподвижен относительно вертикальной оси. Если увеличить частоту вращения для одной пары на Af а для другой – уменьшить на ту же величину Af (чтобы сохранить общий вертикальный вектор тяги неизменным), то будет реализован поворот влево или вправо вокруг вертикальной оси. При одновременном одинаковом изменении частот вращения всех винтов будет осуществляться подъем или снижение квадрокоптера. Для движения в каком-либо направлении (вперед, назад, влево, вправо) двигатель, соответствующий направлению желаемого смещения, должен уменьшить частоту вращения на Af противополжный ему – увеличить на Af а два других – оставить без изменения. 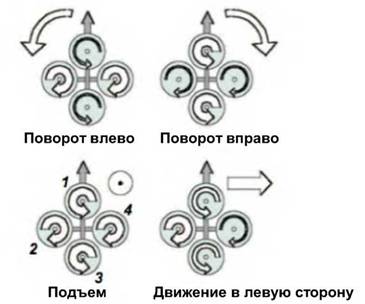 Рис. 1.49. Принцип движения квадрокоптера (схема "+") 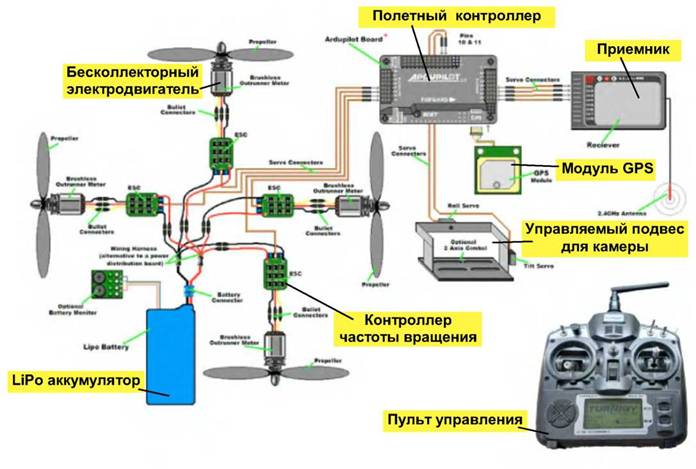 Рис. 1.50. Состав оборудования квадрокоптера Типичный состав оборудования квадрокоптера показан на рис. 1.50. Для аппаратов с другим количеством роторов он аналогичен. Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного сигнала. Здесь они с учетом текущей навигационной информации (получаемой в самом полетном контроллере от встроенных микросистемных гироскопов и акселерометров), а также с учетом сигналов с модуля GPS (опционально) преобразуются в широтно-импульсные сигналы управления двигателями, которые подаются на контроллеры частоты вращения двигателей (т.н. ESC – Engine Speed Control). Назначение модулей ESC – преобразование управляющих широтно-импульсных сигналов в синусоидальные трехфазные напряжения для обмоток бесколлекторных электродвигателей. Типичный источник питания для бортсети мультикоптеров – это батарея литий-полимерных аккумуляторов. Потребляемые токи – от единиц до сотен ампер в зависимости от размеров аппарата. Основное назначение мультикоптеров – это фото- и видеосъемка различных объектов, поэтому они, как правило, оснащаются управляемыми подвесами для камер (рис. 1.51).  Рис. 1.51. Квадрокоптер (схема "+") с видеокамерой Компоновка оборудования на мультикоптере может быть самой различной. Модуль GPS обычно стараются выносить отдельно как можно дальше от сильноточных цепей. Для защиты пропеллеров часто предусматривают специальные охватывающие ограждения (рис. 1.52). Для увеличения подъемной силы и повышения живучести аппарата часто объединяют на одной балке тянущий и толкающий винты с соответствующими двигателями (рис. 1.53).  Рис. 1.52. Квадрокоптер с защитой пропеллеров (вверху – GPS-модуль)  Рис. 1.53. Квадрокоптер (схема "х") с совмещенными тянущими и толкающими винтами Гексакоптеры и октокоптеры, имеющие соответственно по 6 и 8 роторов (рис. 1.54 – 1.55), обладают гораздо большей грузоподъемностью по сравнению с квадрокоптерами. Они также способны сохранять устойчивый полет при выходе из строя одного ротора. Такие аппараты отличаются также гораздо меньшим уровнем вибраций, что особенно важно для видеосъемки.  Рис. 1.54. Гексакоптер  Рис. 1.55. Октокоптер 1.2.2.4. БПЛА с машущим крылом БПЛА с машущим крылом (flapping-wing UAV) основаны на бионическом принципе – копировании движений, создаваемых в полете летающими живыми объектами – птицами и насекомыми. Хотя в этом классе БПЛА пока нет серийно выпускаемых аппаратов и практического применения они пока не имеют, во всем мире проводятся интенсивные исследования в этой области. В последние годы появилось большое количество разных интересных концептов малых БПЛА с машущим крылом. Главные преимущества, которые имеют птицы и летающие насекомые перед существующими типами летательных аппаратов – это их энергоэффективность и маневренность. Если разработчикам "машущих" БПЛА удастся по показателям энергоэффективности и маневренности приблизиться к тому, что уже имеется в живой природе, то тогда их усилия будут не напрасными, и можно ожидать, что этот класс аппаратов начнет находить свое применение. Аппараты, основанные на имитации движений птиц, получили название орнитоптеров (англ.: omithopter), а аппараты, в которых копируются движения летающих насекомых – энтомоптерами (англ.: entomopter) [43]. Орнитоптеры.При создании БПЛА, имитирующих движения птиц, много внимания уделяется механическому приводу крыльев. Механические передачи должны обеспечивать необходимый набор движений и при этом быть простыми и легкими. Кроме махов вверх/вниз с нужной частотой, система управления движением в подходящие по внешним условиям моменты должна реализовывать режим парения, для того, чтобы аппарат мог максимально эффективно использовать набегающие и восходящие потоки воздуха. Показательным примером в этой области является БПЛА SmartBird германской фирмой Festo, которая известна своими разработками в области бионики. Созданный ей аппарат внешне действительно очень похож на птицу (рис. 1.56). Он выполнен по образу и подобию реальной птицы – серебристой чайки, но несколько крупнее ее по габаритам. Аппарат способен не только собственно летать, но и совершать самостоятельные взлет и приземление. Крылья SmartBird движутся не только вверх и вниз, но также и поворачиваются вокруг собственной оси, что обеспечивает движениям максимальную точность. БПЛА SmartBird имеет длину 1 м, размах крыльев 2 м, массу 450 г. Питание осуществляется от литий-полимерной двухэлементной аккумуляторной батареи (7,4 В). Потребляемая мощность в режиме выполнения маховых движений всего 23 Вт, в режиме парения еще меньше – 18 Вт. Аппараты, подобные описанному, в скором времени вполне смогут найти свое место на рынке БПЛА. Военные ведомства различных стран уже оценили очевидные достоинства этих аппаратов при выполнении разведывательных и диверсионных операций.  Рис. 1.56. Орнитоптер SmartBird компании Festo (Германия, 2011): а – создатели аппарата; б – вид сзади; в – демо-макет механических передач; г – различные фазы полета Энтомоптеры.БПЛА, имитирующие движения летающих насекомых, условно можно подразделить на имитаторы четырехкрылых и имитаторы двукрылых насекомых. Четырехкрылые (стрекозы, бабочки) совершают более сложные движения, чем двукрылые, и возможностей управления полетом у них гораздо больше. На рис. 1.57 показан пример четырехкрылого энтомоптера, разработанного компанией Festo.  Рис. 1.57. Эитомоитер Вionicopter компании Festo (Германия, 2013) Длина корпуса аппарата составляет 44 см, размах крыльев 63 см. Крылья выполнены из углеродного волокна и полиэфирной плёнки. Показатель частоты взмахов крылом относительно невысокий – 15-20 Гц. Масса аппарата составляет всего 175 г. Управление полётом робота осуществляется со смартфона. BionicOpter имеет встроенный ARM-микроконтроллер, обеспечивающий стабилизацию полёта. Аппарат оснащен одним основным электродвигателем и восемью сервоприводами. На борту имеется набор сенсоров для предотвращения столкновений с препятствиями. Схема питается от двухсекционного литийполимерного аккумулятора 7,4 В. Конструкция BionicOpter обеспечивает этому аппарату множество возможностей маневрирования. Каждое крыло, кроме маховых движений, может совершать вращательные движения вокруг своей оси и угловые перемещения в горизонтальной плоскости. Кроме того, хвостовая часть может изгибаться, меняя положение центра тяжести. Благодаря таким возможностям управления, аппарат может, например, мгновенно зависать на месте и перемещаться в горизонтальной плоскости в любую сторону, не изменяя при этом угла тангажа. Разработки БПЛА, имитирующие двукрылых насекомых, развиваются, в основном, в направлении микроминиатюризации аппаратов. Здесь все достижения, видимо, еще впереди. Развитие технологий новых сверхлегких материалов, источников питания, наноэлектроники и интеллектуального управления в ближайшие годы позволят создать микроминиатюрные насекомоподобные БПЛА, приближающиеся к живым существам и по выполняемым функциям, и по размеру. Появятся (уже появляются) новые концепции управления коллективами микророботов, перед которыми можно будет ставить цели, ранее не достижимые, т.к. эти формации воздушных микророботов будут обладать большими возможностями в силу таких их качеств, как коллективная живучесть, способность многовариантного решения задач, незаметность перемещений, способность к массированным и непрерывным миссиям и т.д. Пример разработки миниатюрного двукрылого энтомоптера показан на рис. 1.58. Это микро-БПЛА Mobee (Monolithic Bee), разработанный Лабораторией микроробототехники Гарвардского университета (США). Его особенность в том, что он изготовлен по интегральной многослойной технологии. В основе – тонкая углепластиковая пластина, в которой лазером сделаны все необходимые вырезы, затем нанесено еще множество металлических и неметаллических слоев, формирующих необходимые электронные и микроэлектромеханические устройства, включая сенсоры, радиотехнические устройства и актуаторы крыльев [44]. 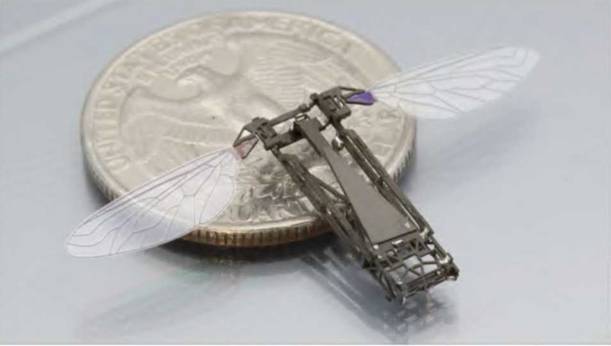 Рис. 1.58. Энтомоптер Mobee – разработка Harvard Microrobotics Lab (США, 2011) 1.2.2.5. БПЛА аэростатического типа БПЛА аэростатического типа (blimps) – это особый класс БПЛА, в котором подъемная сила создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Этот класс представлен, в основном, беспилотными дирижаблями. Дирижабль (от фр. dirigeable – управляемый) – Л А легче воздуха, представляющий собой комбинацию аэростата с движителем (обычно это винт (пропеллер, импеллер) с электрическим двигателем или ДВС) и системы управления ориентацией. По конструкции дирижабли подразделяются на три основных типа: мягкий, полужёсткий и жёсткий [45]. В дирижаблях мягкого и полужёсткого типа оболочка для несущего газа мягкая, которая приобретает требуемую форму только после закачки в неё несущего газа под определённым давлением. В дирижаблях мягкого типа неизменяемость внешней формы достигается избыточным давлением несущего газа, постоянно поддерживаемым баллонетами – мягкими ёмкостями, расположенными внутри оболочки, в которые нагнетается воздух (рис. 1.59). Баллонеты, кроме того, служат для регулирования подъемной силы и управления углом тангажа (дифференцированная откачка/закачка воздуха в баллонеты приводит к изменению центра тяжести аппарата). Дирижабли полужёсткого типа отличаются наличием в нижней части оболочки жесткой (в большинстве случаев на всю длину оболочки) фермы. В жёстких дирижаблях неизменяемость внешней формы обеспечивается жестким каркасом, обтянутым тканью, а газ находится внутри жёсткого каркаса в баллонах из газонепроницаемой материи. Жесткие дирижабли в беспилотном исполнении пока практически не применяются. 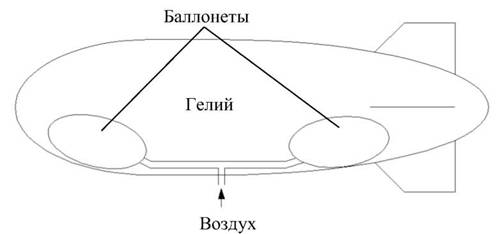 Рис. 1.59. Система баллонетов Хорошим примером современного мягкого дирижабля является Skyship 600, разработанный в 1984 г. британской компанией Airship Industries (рис. 1.60). Skyship 600 изготовлен из кевлара и композитных материалов. Большинство построенных дирижаблей Skyship 600 были использованы в рекламных целях [46]. Он может использоваться как в пилотируемом, так и в беспилотном вариантах. В состав оснащения входят бортовые видеокамеры, которые позволяют производить круглосуточный мониторинг территорий. На летних Олимпийских играх 2004 года дирижабль Skyship 600 применялся для видеонаблюдения. Дирижабль Skyship 600 имеет, как и большинство дирижаблей, традиционную сигарообразную форму. Его основные параметры: длина: 66 м, высота: 22 м; объем оболочки: 7600 м 3 ; крейсерская скорость: 64 км / ч; потолок: 2100 м; дальность полета 644 км; двигатели: 2 х Porsche 930 мощностью по 255 л.с. Положением воздушного корабля можно управлять с помощью баллонетов, поворотных элементов хвостового оперения, а также с помощью двух отклоняемых импеллеров. Малые мягкие беспилотные дирижабли выпускает множество фирм во всем мире. Они предназначены для управляемых полетов как внутри помещений (таких как выставочные залы, стадионы и т.д.), так и на открытом воздухе.  а  б  в Рис. 1.60. Дирижабль Skyship 600, разработанный в 1984 г. британской компанией Airship Industries: а – у причальной мачты; б – в полете; в – отклоняемые импеллеры На рис. 1.61 показан дешевый беспилотный дирижабль фирмы Minizepp (Швейцария). Емкости аккумулятора хватает этому аппарату на 10 часов полета. Его длина составляет 5 м. Дальность полета 300 км, предельная высота 3000 м, максимальная скорость 65 км/ч. Наиболее типичные применения современных беспилотных дирижаблей – это реклама и видеонаблюдение. Однако в последние годы их все чаще заказывают телекоммуникационные компании для использования в качестве ретрансляторов сигналов. Существуют также проекты постройки дирижаблей очень большой грузоподъемности – 200-500 тонн [47].  Рис. 1.61. Дирижабль фирмы Minizepp (Швейцария, 2012) Привлекают внимание новые концепты дирижаблей, имеющие, как правило, нетрадиционные форму оболочки и способ движения. Так, в России успешно испытаны дирижабли, имеющие не сигарообразную, а дисковидную форму. Беспилотные дирижабли линзообразной формы планирует выпускать ОАО "Долгопрудненское конструкторское бюро автоматики" при поддержке "Рособоронэкспорта" и "Ростехнологий". Они будут иметь от 22 до 200 м в диаметре и смогут переносить до нескольких сотен тонн груза. Пока созданы лишь демонстрационные масштабные модели таких дирижаблей. Пример – успешно испытанная модель ДП-27 "Анюта" (рис. 1.62). Дисковидная форма этого аппарата обеспечивает устойчивость к боковому ветру, простоту управления и высокую маневренность этого многоцелевого беспилотного дирижабля. Диаметр корпуса судна – 17 м с объёмом оболочки – 522 куб. м, грузоподъёмность – 200 кг, максимальная высота подъёма достигает 800 м. С помощью 4 двигателей по 25 л.с. аппарат развивает скорость до 80 км/ч, бензобак объемом 40 л позволяет демонстратору осуществлять полёт на дистанцию 300 км. Данный образец предназначен для проверки конструкционных решений и систем управления, которые впоследствии будут применены на полномасштабном опытном дирижабле [48].  Рис. 1.62. Экспериментальный дирижабль "Анюта" Долгопрудненского конструкторского бюро автоматики (Россия, 2011) В другой разработке российских дирижаблестроителей (компания "Локомоскай" в сотрудничестве с ульяновским ЗАО "Авиастар-СП" [47]) основной особенностью является то, что помимо объемов гелия в аппарате присутствует полость, заполняемая подогреваемым воздухом (идея, предложенная К.Э. Циолковским в 90-х гг. XIX века). Благодаря такой конструкции, позволяющей контролировать подъемную силу, аппарат сможет совершать не только вертикальный взлет, но и зависать в одной точке или садиться на любую ровную площадку – в отличие от классических дирижаблей, которым необходимы специальные мачты для причаливания. Для передвижения аппарата используются электродвигатели (рис. 1.63). Кроме этого, по краям дирижабля планируется расположить небольшие крылья, которые тоже будут создавать некоторую подъемную силу. Дискообразная форма позволяет обеспечить устойчивость под напором ветра (до 20 м/с) при зависании аппарата над определенной точкой. По расчетам, AТЛА (аэростатический термобалластируемый летательный аппарат) "Локомоскайнер" будет способен развивать скорость до 110 километров в час, а максимальная дальность его полета составит 3000 км.  Рис. 1.63. Демонстрационная модель "Локомоскайнера" (Россия, 2010) Интересны гибридные концепты, в которых объединяются, как правило, аэростатическая и аэродинамическая подъемные силы. Обычные дирижабли иногда обозначают в англоязычных источниках как LTA (Lighter Than Air – легче воздуха). Гибридные аппараты несколько тяжелее воздуха, поэтому обозначаются как НТА (Heavier Than Air). Обычно они представляют собой гибрид дирижабля и самолета. Пример – аппарат Dynalifter DL-100 американской фирмы Ohio Airships (рис. 1.64). Для взлета и посадки аппарату нужна ВПП, однако это окупается очевидными достоинствами по сравнению с обычными дирижаблями: простота взлета и посадки без необходимости иметь специальные персонал и приспособления, устойчивость к ветровым нагрузкам, в том числе при нахождении на земле. В то же время сохраняется, как у всех дирижаблей, способность летать на очень низких скоростях при малых энергетических затратах [49]. 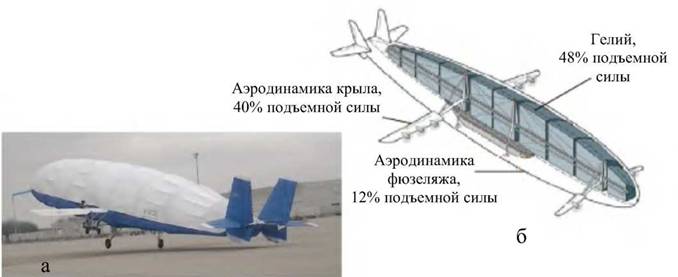 Рис. 1.64. Гибридный аппарат Dynalifter DL-100 (США, 2012): а – взлет; б – распределение подъемной силы В России несколько лет назад был разработан гибрид дирижабля, самолета, вертолета, а также судна на воздушной подушке (СВП) (рис. 1.65). Этот уникальный проект Сибирского научно- исследовательского института авиации (СибНИИА) и ОАО "Тюменьэкотранс" был назван "БАРС" (Безаэродромный с Аэростатической Разгрузкой Самолет) [50]. Создателям БАРСа удалось в этом аппарате исключить недостатки дирижабля, самолета, вертолета и СВП, но сохранив их положительные качества. Так, например, были исключены такие недостатки: у дирижабля – парусность, необходимость иметь сложную систему обслуживания; у самолета – необходимость иметь аэродром; у вертолета – небольшую дальность и дороговизну перевозок. Применение же элементов СВП и несущего винта вертолета позволило обеспечить безаэродромность базирования и эксплуатацию с любой ровной поверхности (воды, болота, снега, грунта). Сохранение элементов самолета (несущие поверхности) и дирижабля (подъемный газ) позволило получить большую грузоподъемность, дальность и высокую экономичность перевозок. Грузоподъемность аппарата может достигать 500 тонн, крейсерская скорость – до 300 км/ч, а дальность полета составляет 3350-4500 км.  Рис. 1.65. Макет гибридного аппарата БАРС (Россия, 2012) Среди серийно производимых беспилотных гибридов на базе дирижаблей стоит выделить интересную разработку итальянской фирмы Nimbus, которая представляет собой своеобразную комбинацию дирижабля и дельтаплана [51] (рис. 1.66). Очевидные достоинства аппарата: легкость, экономичность, способность летать на низких скоростях, бесшумность, простота транспортировки, низкая стоимость (в т.ч. обслуживания). Недостаток – невозможность работы при сильном ветре.  Рис. 1.66. Гибрид дирижабля и дельтаплана компании Nimbus (Италия, 2013) Одним из самых успешных проектов в области разработки гибридных аппаратов, использующих одновременно аэростатический и аэродинамический принципы создания подъемной силы, является аппарат Р-791 американской компании Lockheed Martin [52] (рис. 1.67). Он разрабатывается как в пилотируемом, так и в беспилотном вариантах. Первый полёт прототипа этого воздушного судна состоялся в январе 2006 г. Для взлёта аппарату необходима взлётная полоса. В дирижабле Р-791 решена проблема надёжной посадки дирижабля – для этой цели используются 4 воздушные подушки-присоски. Аппарат обладает большой грузоподъёмностью – в новых моделях дирижаблей заложена возможность перемещения грузов массой до 1000 тонн (проект "Морж" (Walrus)).  Рис. 1.67. Гибридный аппарат компании Lockheed Martin (США, 2010) |