Моделирование системы управления электромеханических объектов. Моделирование-22-1. СвМоделирование в по samSim пирегуляторы
 Скачать 0.55 Mb. Скачать 0.55 Mb.
|

|
свМоделирование в ПО SamSim ПИ-регуляторы Последовательное соединение звеньев  Последовательное соединение звеньев (пропорциональное и изодромное) при моделировании в ПО SamSim представляется интегральным и упреждающим (форсирующим) -W2(p) звеньями. Местами не переставлять!!! 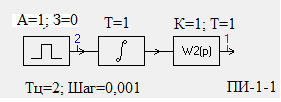 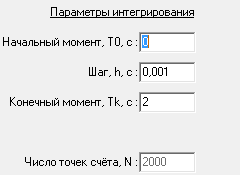 Рисунок 1.1 - Схема модели регулятора и параметры интегрирования 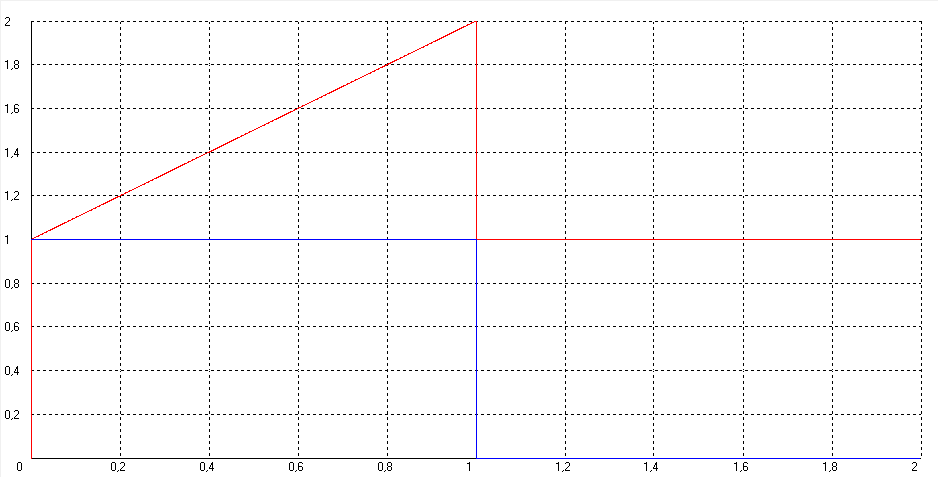 Рисунок 1.2 – Осциллограммы сигналов Параллельное соединение звеньев  При параллельном соединении ПИ регулятор представлен пропорциональным и интегральными звеньями 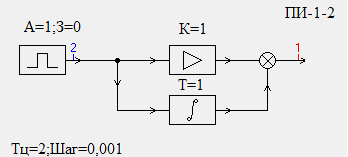  Рисунок 1.3- Схема модели регулятора и параметры интегрирования 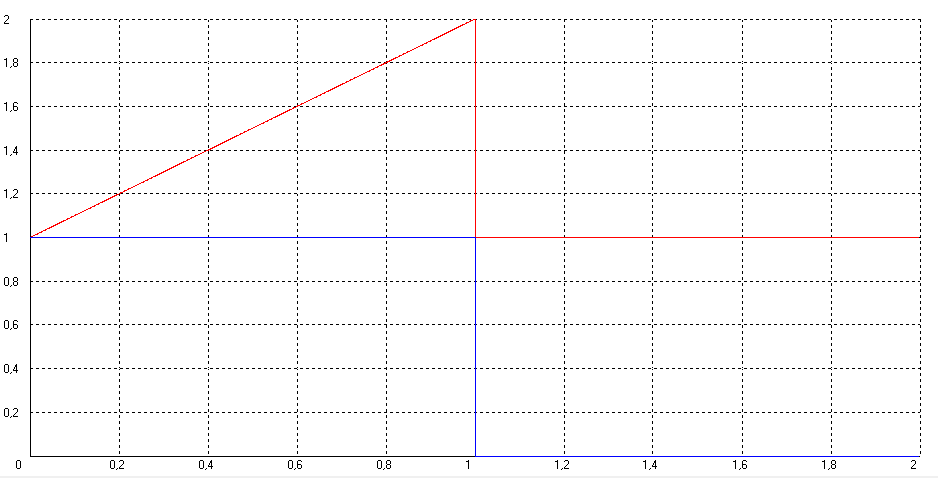 Рисунок 1.4 – Осциллограммы сигналов 1.3 Оба варианта 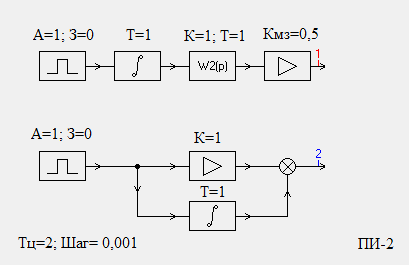 Рисунок 1.5- Схемы моделей регуляторов 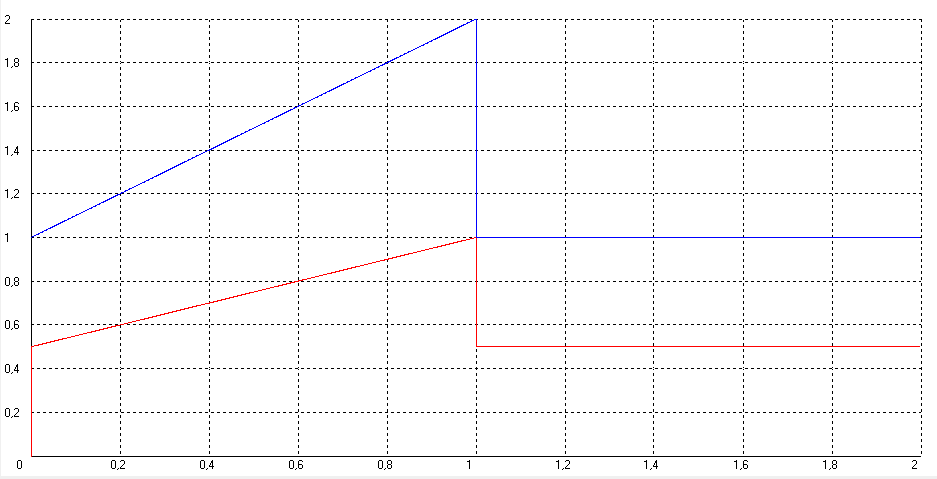 Рисунок 1.6-Осциллограммы выходных сигналов регуляторов Вывод: Осциллограммы совпали (с учетом Кмз=0,5), поэтому ПИ – регулятор можно моделировать как последовательным, так и параллельным соединениям звеньев!!! Оптимизация контура на модульный оптимум (МО), объект которого содержит большую и малую инерционности. 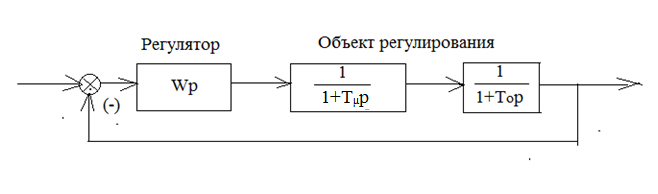 Рисунок 2.1- Структурная схема контура регулирования   = =  = =     = =  . .Примем То=0,025 с, Тµ= 0,005 с. Тогда  . .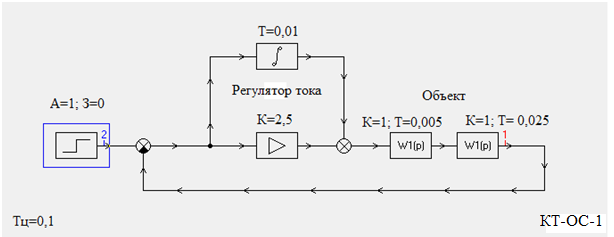 Рисунок 2.2-Схема модели контура с большой и малой постоянными времени в объекте 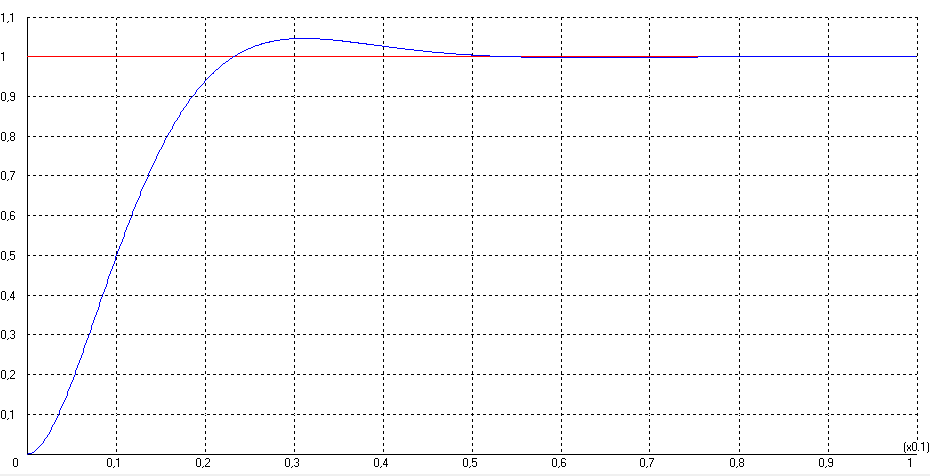 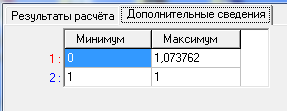 Рисунок 2.3- Осциллограммы сигналов и таблица результатов расчета (Тц=0,1 с; шаг=0,001с; δ=7,4% )   Рисунок 2.4- Осциллограммы сигналов и таблица результатов расчета (Тц=0,1 с; шаг=0,00001с; δ=4,3%) Вывод. При шаге интегрирования в 0,00001с перерегулирование соответствует настройке на модульный оптимум (δ=4,3%). Т.к. в ПО SamSim рекомендуется иметь не более 10000 шагов интегрирования, а надо моделировать процессы длительностью до 10 с, то поэтому шаг интегрирования примем 0,001 с (принимая во внимание небольшую ошибку моделирования). 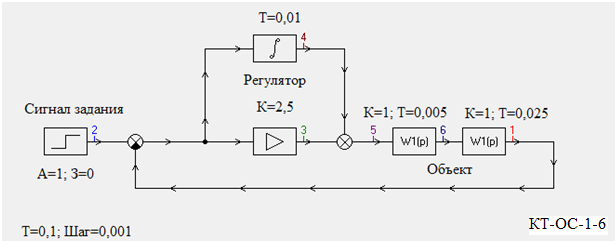 Рисунок 2.5 -Схема модели контура с большой и малой постоянными времени в объекте (контрольные точки у каждого звена) 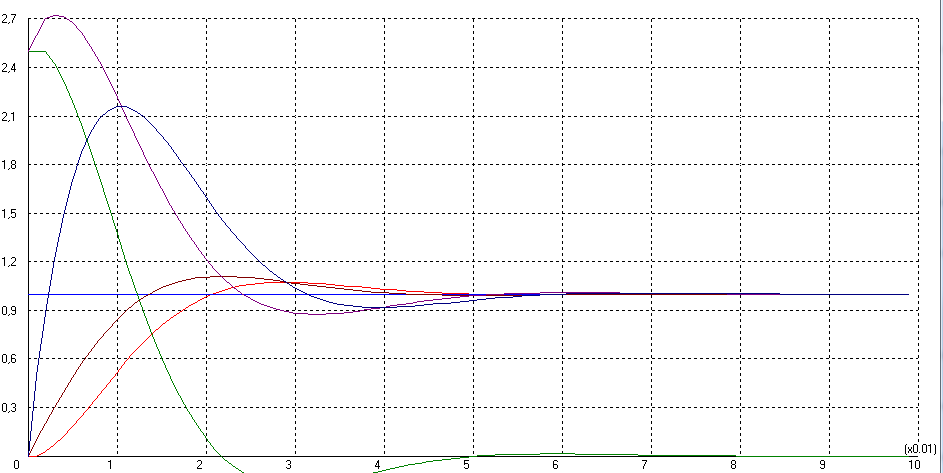 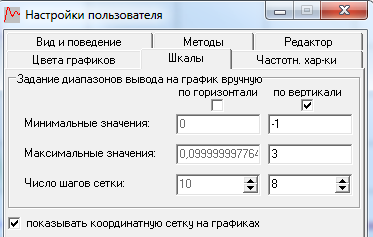 Рисунок 2.6 – Осциллограммы сигналов всех звеньев контура и настройка шкалы по У 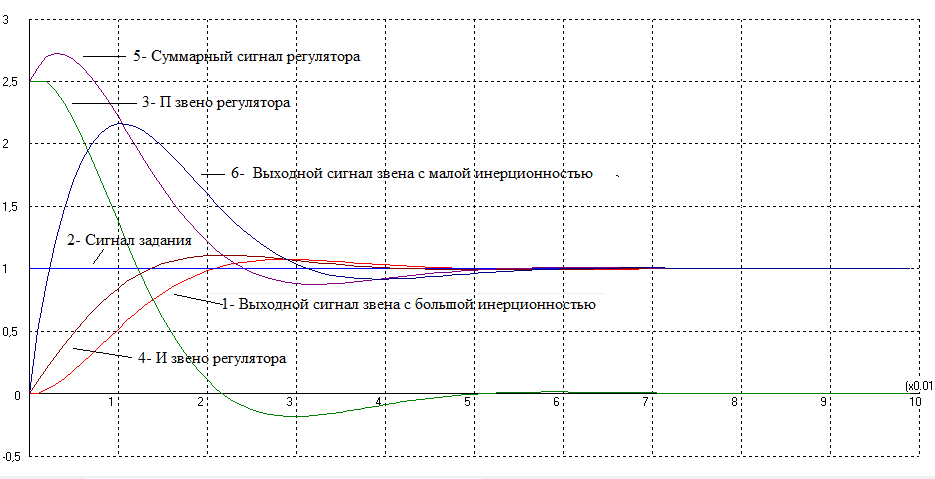 Рисунок 2.7- Осциллограммы сигналов всех звеньев контура Анализ осциллограмм. Пропорциональное звено регулятора при подаче скачка задающего сигнала изменяет свой сигнал мгновенно, далее сигнал снижается с перерегулированием, (принимая отрицательные значения, когда выходной сигнал превышает заданное значение) и в установившемся режиме становиться равным нулю. Интегральное звено регулятора, изменяясь монотонно, с перерегулированием выходит на уровень сигнала задания. Суммарный сигнал регулятора в первый момент изменяется скачком (как и пропорциональная часть), далее немного увеличившись (все это и есть форсировка), начинает уменьшаться и с перерегулированием выходит на тот же уровень, что и интегральная часть. Выходной сигнал звена с малой инерционностью с перерегулированием (форсировкой) выходит на тот же уровень, что и интегральная часть. Выходной сигнал звена с большой инерционностью выходит на заданный уровень с перерегулированием в 4,3% (согласно настройке на МО). Отметим, что инерционности объекта данного контура совпадают с инерционностями реального контура тока. Отличие - в коэффициентах усиления звеньев и канала обратной связи (они не равны единице). Реальный контур тока 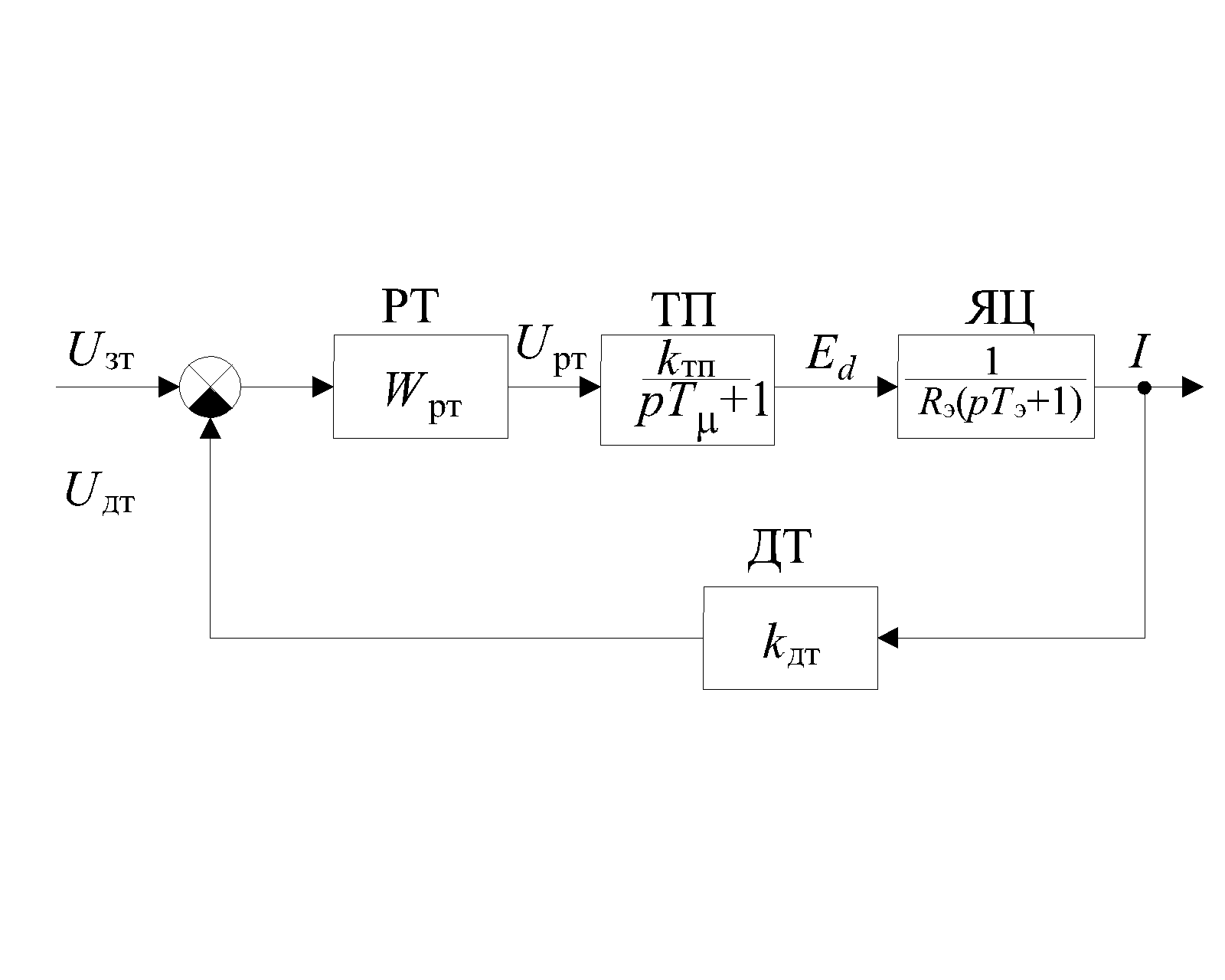 Рисунок 3.1 –Структурная схема контура тока заторможенного двигателя Передаточные функции звеньев контура тока. Тиристорный преобразователь  – апериодическое звено с малой постоянной времени – апериодическое звено с малой постоянной времениЯкорная цепь  – апериодическое звено с большой постоянной времени – апериодическое звено с большой постоянной времениДатчик тока  – пропорциональное звено – пропорциональное звеноДля настройки контура тока на модульный оптимум передаточную функцию разомкнутого контура следует устремить к последовательному соединению интегрирующего звена с удвоенной малой постоянной времени (2Тμ) и апериодического звена с малой постоянной времени (Тμ).  . .В результате получаем регулятор тока ПИ – типа с передаточной функцией:  , ,где:  – коэффициент пропорционального усиления, а – коэффициент пропорционального усиления, а  – изодромная часть регулятора тока. – изодромная часть регулятора тока.Приведенная передаточная функция соответствует представлению регулятора тока в виде последовательно-включенных пропорционального и изодромного звеньев. Если регулятор представить в виде паралельно-включенных звеньев (так на практике они реализованы в микропроцессорных системах регулирования) , то передаточная функция примет вид:  , ,где  - коэффициент пропорционального усиления, а Трт –постоянная времени интегрального звена регулятора тока. - коэффициент пропорционального усиления, а Трт –постоянная времени интегрального звена регулятора тока. На рис.3.2 приведена схема модели контура тока заторможенного двигателя в ПО SamSim. 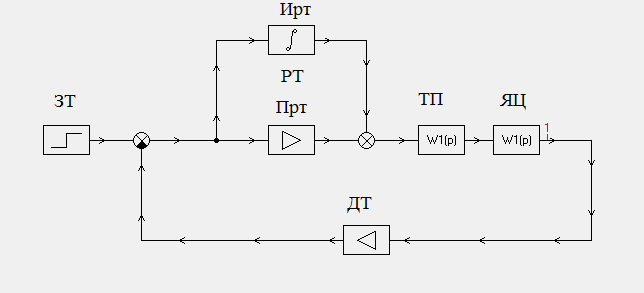 Рисунок 3.2- схема модели контура тока заторможенного двигателя двигателя с регулятором тока в виде паралельно-включенных пропорциональнного и интегрального звеньев в ПО SamSim. Определим параметры звеньев для численного примера (Рн= 10 кВт; Uн=220 В; Iн=50 А; Iмакс=2Iн=100А; nн= 1000 об/мин; Rа=0,2 Ом; Rэ =0,4 Ом; Еd0= 269 В; Тэ = 0,025 с; Тм=0,04 с; Тμ = 0,005 с): Тиристорный преобразователь.   Якорная цепь двигателя.  Датчик тока  Регулятор тока.  ; ; . .Передаточная функция замкнутого контура тока  где  - эквивалентная постоянная времени оптимизированного на модульный оптимум контура тока. - эквивалентная постоянная времени оптимизированного на модульный оптимум контура тока.В установившемся режиме:  → →  . .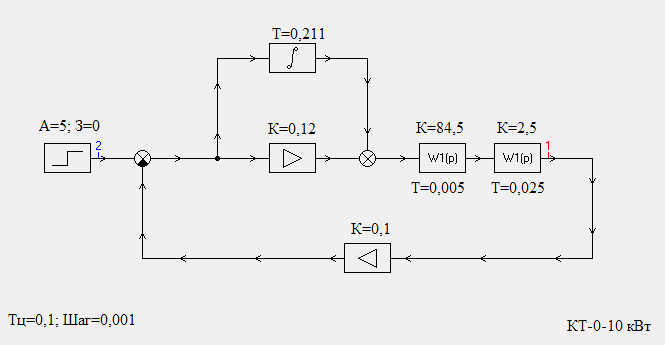 Рисунок 3.3 - Схема модели замкнутого контура тока заторможенного двигателя с числовыми параметрами звеньев в ПО SamSim 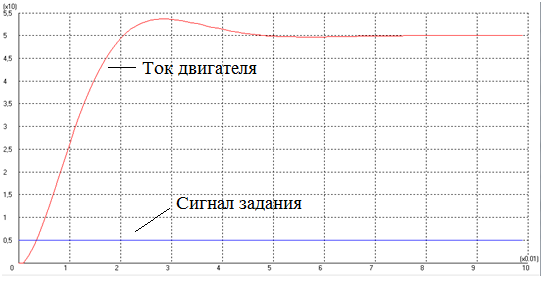 Рисунок 3.4 – Осциллограмма тока на выходе заторможенного контура тока двигателя при отработки скачка задающего сигнала (Uзт=5В), соответствующего номинальному значению. 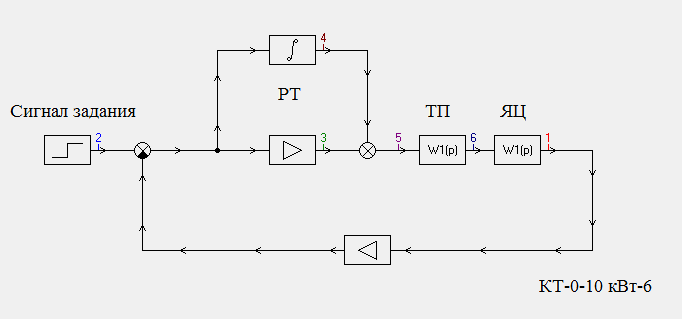 Рисунок 3.5 - Схема модели замкнутого контура тока заторможенного двигателя с контрольными точками у каждого звена в ПО SamSim 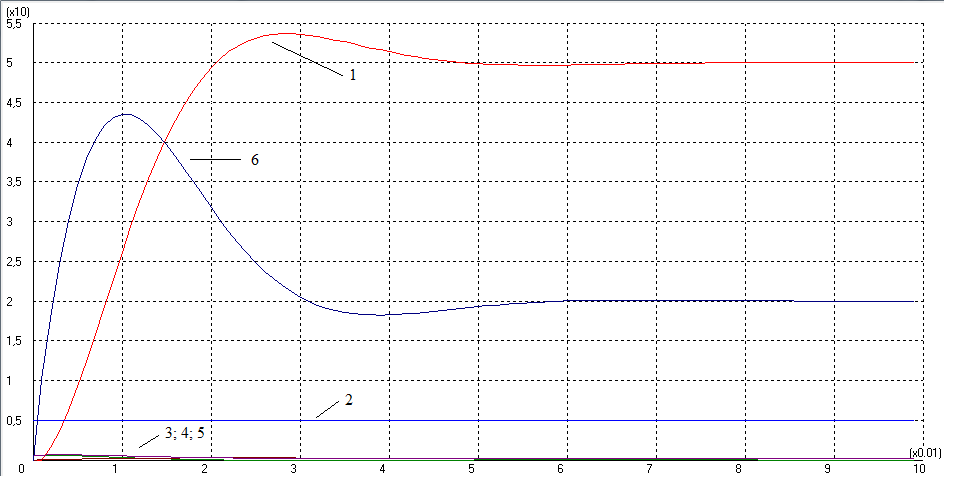 Рисунок 3.6- Осциллограммы сигналов всех звеньев контура при отработке скачка задающего сигнала Недостаток- сигналы регулятора тока существенно меньше сигналов тиристорного преобразователя и выходного тока, поэтому «сливаются» с осью времени. Для наблюдения этих сигналов необходимо поставить масштабирующие звенья (масштабирующие усилители). 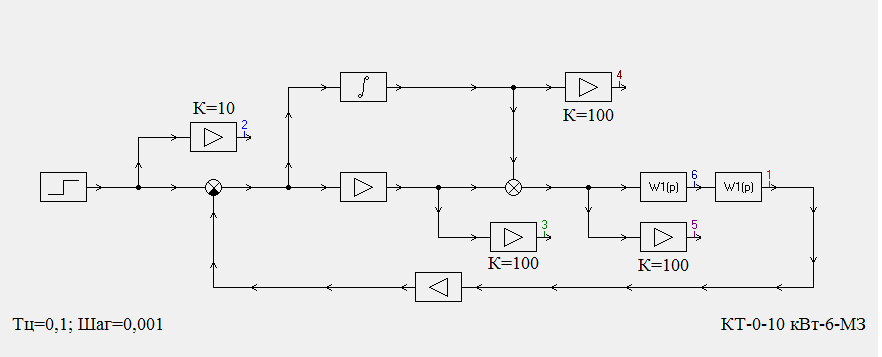 Рисунок3.7 - Схема модели контура тока с масштабирующими 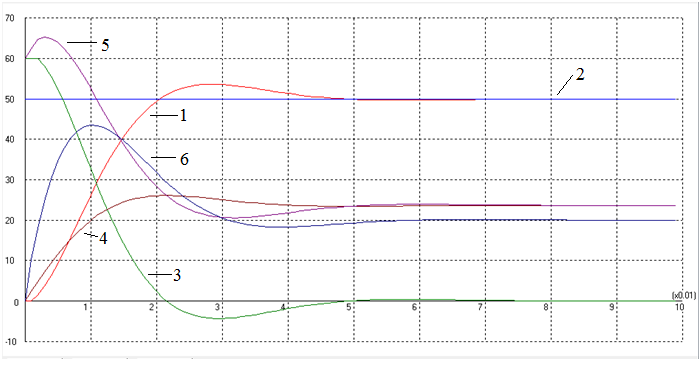 Рисунок 3.8. Сигналы всех звеньев при отработке скачка задающего сигнала заторможенным контуром тока Из анализа осциллограмм можно сделать следующие выводы. Пропорциональная часть регулятора тока изменяет свой сигнал (3) скачком. В дальнейшем сигнал уменьшается до нуля с перерегулированием (в течение всего интервала перерегулирования выходного сигнала - тока якоря, этот сигнал будет отрицательным). Сигнал интегральной части регулятора тока (4) увеличивается, выходя на установившийся уровень с небольшим с перерегулированием. Результирующий сигнал регулятора тока (5) в первый момент изменяется скачком (благодаря сигналу пропорциональной части), затем немного возрастает, а далее снижается и выходит на установившийся уровень с небольшим перерегулированием. Напряжение тиристорного преобразователя (6) изменяется монотонно (без скачков). На установившееся значение напряжение преобразователя выходит с перерегулированием. Максимальное напряжение тиристорного преобразователя определяет запас на динамику, а установившийся уровень – определяет запас на статику для данного значения тока якоря. 3.2 Контур тока с учетом влияния внутренней отрицательной обратной связи по ЭДС Максимальное влияние внутренней отрицательной обратной связи по ЭДС проявляется при максимальном ускорении двигателя, что имеет место при разгоне на холостом ходу или при торможении с максимальной нагрузкой.  Рисунок 3.9 – Структурная схема замкнутого контура тока с учетом влияния внутренней отрицательной обратной связи по ЭДС 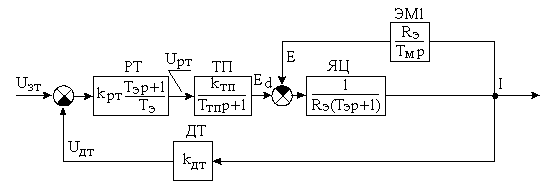 Рисунок 3.10 – Структурная схема замкнутого контура тока в режиме разгона-торможения на холостом ходу 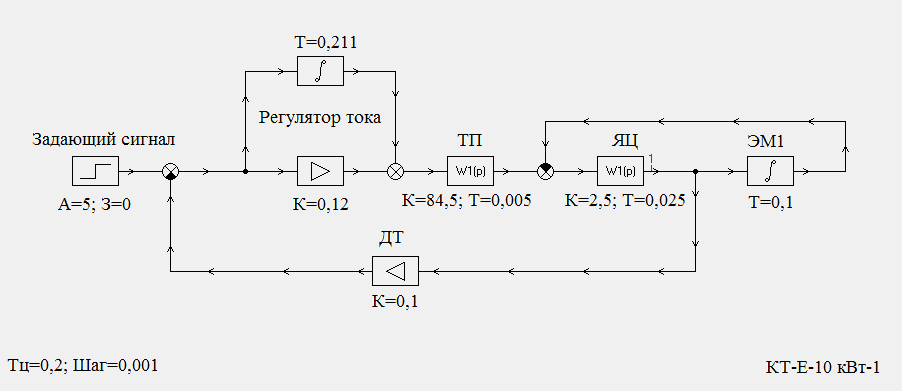 Рисунок 3.11 – Схема модели замкнутого контура тока в режиме разгона-торможения на холостом ходу в ПО SamSim Электромеханическое звено (ЭМ1):  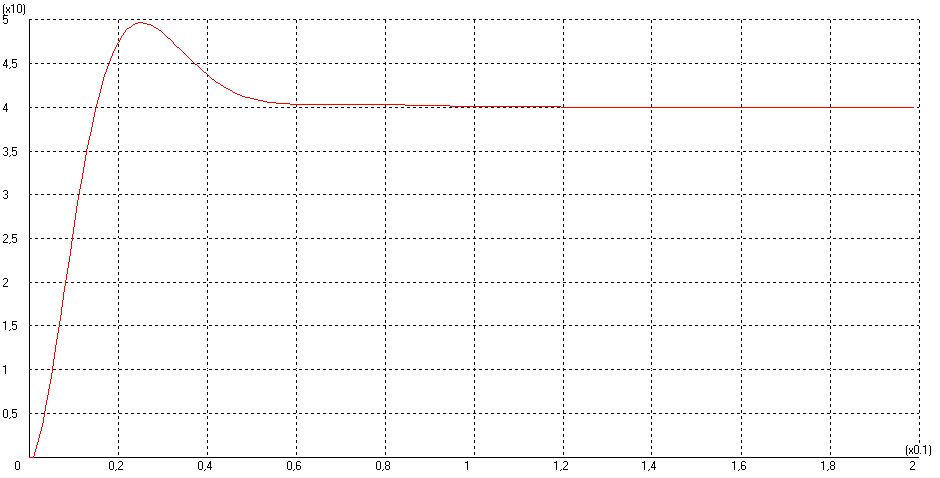 Рисунок 3.12 – Осциллограмма тока при отработке скачка задания на номинальный ток двигателя в режиме разгона на холостом ходу Установившееся значение тока при разгоне на холостом ходу определяется пределом передаточной функции замкнутого контура тока с учетом влияния внутренней отрицательной обратной связи по ЭДС:   Тогда ;  . .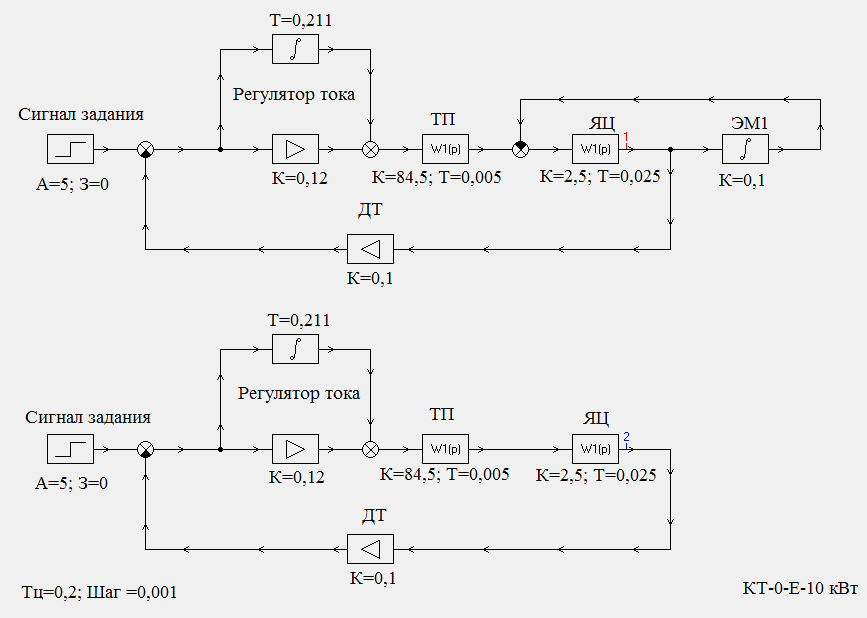 Рисунок 3.13- Схемы моделей контура тока заторможенного двигателя и при разгоне на холостом ходу в ПО SamSim 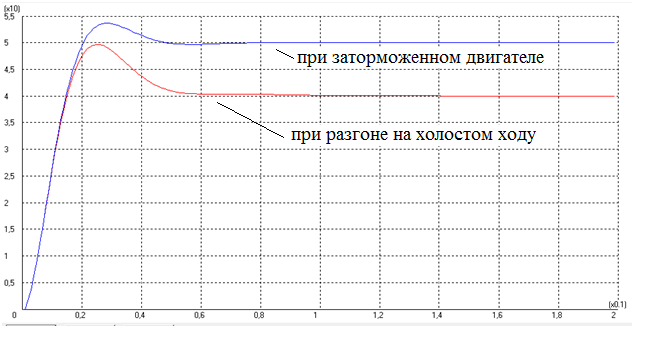 Рисунок 3.14 – Осциллограммы тока при отработке скачка задания на номинальный ток при заторможенном двигателе и в режиме разгона на холостом ходу |