Technical sciences
 Скачать 117.59 Kb. Скачать 117.59 Kb.
|

|
Вычислительная система Вычисления в рое дронов основаны на процессе, аналогичном NCS, в котором простые данные могут привести к принятию сложных решений. Следовательно, разработка подходящей вычислительной системы основывается на исследовании наилучших стратегий принятия решений в зависимости от используемой стратегии развертывания и алгоритмов разведки. Самоорганизованное принятие решений Любой беспилотный летательный аппарат обладает вычислительной способностью для выполнения полета с базовым уровнем управления, но только летательные аппараты с высоким уровнем автономности могут принимать решения для выполнения задач без вмешательства наземной станции управления. В рое дронов принятие решений может осуществляться самими агентами распределенным образом и централизованным управляющим органом. Последнее происходит в роях беспилотных летательных аппаратов с низкой автономностью. Однако в рое беспилотных летательных аппаратов с высоким уровнем автономии принятие решений может осуществляться самими дронами. Централизованный процесс принятия решений предлагает простые решения с точки зрения общей конструкции системы, способствуя при этом снижению энергопотребления каждого дрона. С другой стороны, распределенный подход к принятию решений может привести к созданию более надежного и масштабируемого роя дронов. Поэтому стоит уделить внимание распределенным процессам принятия решений, которые могут привести к созданию более автономного, надежного и масштабируемого роя беспилотных летательных аппаратов. Самоорганизующееся поведение роя дронов означает, что они находятся во взаимодействии и поддерживают сетевое подключение, учитывая изменяющиеся условия сети [4]. При этом используется ряд самоорганизующихся алгоритмов, направленных на оказание помощи распределенным агентам: уже упоминавшиеся методы оптимизации роя частиц (Particle Swarm Optimization, PSO), колонии муравьев (Ant Colony Optimization, ACO) и пчелиной колонии (Bee Colony Optimization, BCO). В целом децентрализованная архитектура использования самоорганизующихся средств управления принятием решений для систем с несколькими БПЛА представлена на рисунке 4. Для взаимодействия и функционирования каждого беспилотного летательного аппарата самоорганизующиеся процедуры поддержки принятия решений делятся на три этапа, а именно: восприятие, принятие решения и действие (см. рис. 4). Информация о местоположении и скорости беспилотных летательных аппаратов и соседей собирается путем рассмотрения стационарных и мобильных препятствий, после чего выполняются процессы принятия решений на основе моделирования и оптимизации для улучшения результатов. Затем исполнительный механизм обрабатывает предпоследние наилучшие возможные решения, и процессы повторяются снова. Для выработки коллективного поведения и обмена собираемыми данными работа дронов также должна быть синхронизирована. Синхронизация позволяет координировать события между отдельными агентами в разных беспилотных летательных аппаратах для поддержки их гармоничной работы в рое. Это помогает распределенным процессорам иметь общее представление о времени посредством обмена сообщениями- маяками, позволяющими эффективно диагностировать неисправности и восстанавливать их. Синхронизация облегчает объединение данных с разных распределенных узлов в единую значимую информацию посредством так называемого слияния данных. 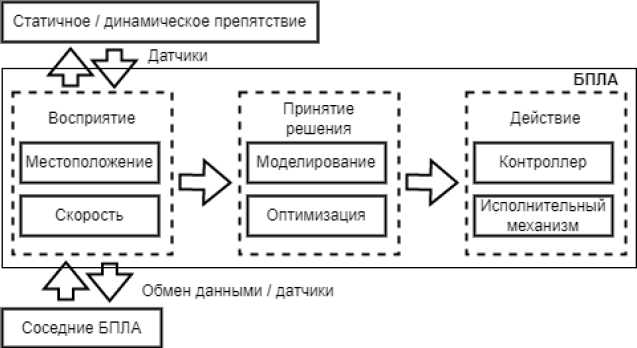 Рис. 4. Самоорганизующиеся процедуры принятия решений Fig. 4. Self-organizing decision-making procedures Роевой интеллект Цель роевого интеллекта (Swarm Intelligence) - создание продвинутого и сложного поведения роя дронов, которые локально взаимодействуют между собой и с окружающей средой. Работа систем роевого интеллекта направлена на имитацию некоторых биологических систем, в которых агенты (например, муравьи, пчелы) следуют простым правилам, которые не диктуются какой-либо центральной организацией. В этих системах взаимодействия между агентами уступают место появлению глобальных моделей поведения. В этом контексте алгоритмы роевого интеллекта направлены на управление роем дронов в том, что касается его поведения, на основе двух подходов, а именно оптимизации и консенсуса. Вычислительная и сетевая интеграция Для создания замкнутого цикла в стае дронов необходимо обеспечить тесную связь между вычислительными и сетевыми системами, что позволит наилучшим образом использовать ограниченные ресурсы, которыми может располагать каждый беспилотный летательный аппарат для решения задач зондирования, вычислений и создания сетей. Сеть, поддерживающая вычисления Очевидно, что эффективная работа сетевого оборудования вносит свой вклад в вычислительную систему, настраивая топологию сети, способную поддерживать необходимый обмен данными между всеми дронами в рое. Данные, требуемые вычислительной системой, передаются с использованием сетевой системы, также как и результаты работы вычислительной системы каждого дрона обычно передаются другим через сетевую систему, чтобы позволить общей системе достичь консенсуса. Следовательно, существенное влияние на вычислительные возможности роя дронов оказывает производительность сетевой системы. Основываясь на чистом сетевом решении IP (например, типологии, созданные и поддерживаемые мобильными протоколами маршрутизации Adhoc), все беспилотные летательные аппараты должны знать, с каким другим дроном им необходимо взаимодействовать в процессе вычислительной функции (например, для предотвращения столкновений). Такой подход приводит к проблемам с масштабируемостью и производительностью из-за объема состояний, которые необходимо сохранить каждому дрону, и времени, необходимого для обновления этой информации. Следовательно, одно из потенциальных решений заключается в использовании сетевой системы, основанной на поименованных объектах данных [20], позволяющей каждому дрону извлекать данные, необходимые для их вычислительной функции, без необходимости знать, где эти данные хранятся в системе стаи. Несмотря на двухуровневость выполнения операции, такая сетевая система поможет уменьшить задержки, поскольку необходимые данные могут быть извлечены из кэша, развернутого в более близком беспилотном летательном аппарате. Кроме того, сетевая система по-прежнему требует, чтобы все данные, необходимые для вычислительной функции, сначала должны быть доставленными; и кроме того, в роевой системе нужно обнаружить необходимую вычислительную функцию (например, оценить обновленный список потенциальных препятствий). В этом случае предполагается, что из-за энергетических ограничений не все дроны будут отвечать за выполнение всех вычислительных функций, необходимых для управления всем роем. Хотя такая сеть была бы ориентирована на предоставление системы разрешения от имен служб до требуемых данных, лучшим решением может быть сетевая система, способная разрешать вычислительные функции вместо имен. Эту задачу самоорганизации роя могут решать сети именованных функций (Named Function Network, NFN), позволяющие запрашивающему агенту быть независимым от статуса роя дронов и хранящих только локальную информацию [21]. Однако использование сетевой системы, основанной на NFN, будет рассматривать рой дронов как полностью доверенный объект, что может соответствовать истине. Следовательно, рой дронов на основе NFN должен быть способен транспарентно оценивать результаты каждой вычислительной функции. Вычислительная поддержка сети Вычислительная система может улучшить сетевую систему в нескольких ситуациях; например, некоторая информация об окружающей среде, такая как изменения высоты или рельефа, может привести к изменениям в используемых моделях каналов, что окажет влияние на производительность сетевой системы. В этом случае производительность сети может быть улучшена с помощью вычислительной системы, поскольку она может измерять и моделировать беспроводной канал и классифицировать этот канал в соответствии с предопределенными правилами. Приведем несколько примеров исследований по внедрению вычислений в сетевую систему с целью повышения общей производительности системы. Прежде всего, это интеллектуальные алгоритмы на основе операций ограничения, предназначенные для смягчения ограничений, связанных с высокой задержкой и низкими скоростями передачи. Для реализации алгоритмов можно использовать, например, предметноориентированный язык программирования P4, предназначенный для программирования правил маршрутизации пакетов. Язык позволяет эффективно использовать вычислительные функции, связанные с агрегированием сообщений подтверждения, улучшать поддержку многоадресной рассылки и принимать решения о маршрутизации, имеет возможность масштабирования пересылки в зависимости от текущих условий (например, показателей качества связи, мобильности дронов и т.п.), снижать накладные расходы на связь во всей системе с учетом ограничений коммуникационных затрат. Использование роем беспилотников беспроводных каналов требует особого внимания к обеспечению безопасности связи и защиты данных. Неправильное поведение и утечка информации могут привести к физическому ущербу и поставить под угрозу работу роя. В этом контексте встраивание вычислений в рой позволило бы обрабатывать трафик и данные непосредственно в сети и с линейной скоростью. Таким образом, интеграция вычислительных и сетевых систем создает адекватную поддержку для обеспечения необходимых механизмов безопасности и конфиденциальности: предотвращение атак и вторжений; обнаружение вторжения и нежелательного поведения; увеличение возможностей роя по анализу потенциальных инцидентов и предотвращения будущих атак. Внедренная в процесс принятия решений вычислительная система помогает беспилотным летательным аппаратам лучше управлять своей сетью, учитывать их собственные свойства, а также состояние окружающей среды. Заключение Рассмотрение разработанной стаи беспилотных летательных аппаратов в качестве NCS помогает повысить производительность всей системы при решении оперативных и экологических проблем. Разделение роя дронов на сетевую и вычислительную системы позволит создать эффективно функционирующую самоорганизующуюся систему роя. При этом представляется важным при создании сетевой системы не полагаться на идентификацию хостов (например, дронов), а скорее на их вычислительные функции, которые могут быть развернуты в любом дроне. Такой подход обеспечивает основу для решения основных проблем, выявленных при разработке роя дронов как сетевой системы управления. Интеграция сетевой системы, способной осуществлять решение вычислительных выражений по требованию, составленных для каждого дрона из именованных данных и функций транспарентным способом, позволяет реализовать свойство самоорганизации роя. Примечание Довгаль В.А., Довгаль Д.В. Модель взаимодействия анализирующих туманно-облачных вычислений для обработки информации о положении беспилотных летательных аппаратов // Осенние математические чтения в Адыгее: материалы III междунар. науч. конф. Майкоп, 2019. С.149-154. Довгаль В.А., Довгаль Д.В. Использование интернета вещей для охраны окружающей среды // Фундаментальные и прикладные аспекты геологии, геофизики и геоэкологии с использованием современных информационных технологий: материалы V междунар. науч.-практ. конф. Ч. 1. Майкоп: Изд-во Кучеренко В.О., 2019. С. 152-157. Zeng Y., Zhang R., Lim T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges // IEEE Communication Magazine. 2016. Vol. 54. P. 36-42. Довгаль В.А., Довгаль Д.В. Анализ систем коммуникационного взаимодействия дронов, выполняющих поисковую миссию в составе группы // Вестник Адыгейского государственного университета. Сер.: Естественно-математические и технические науки. 2020. Вып. 4 (271). С. 87-94. URL: http://vestnik.adygnet.ru A survey of using swarm intelligence algorithms in IoT / W. Sun, M. Tang, L. Zhang, Z. Huo, L. Shu // Sensors. 2020. Vol. 20. P. 1420. Довгаль В.А., Довгаль Д.В. Анализ проблем обеспечения информационной безопасности беспроводных сенсорных сетей и методов обеспечения безопасности интернета вещей // Вестник Адыгейского государственного университета. Сер.: Естественно-математические и технические науки. 2021. Вып. 1 (276). С. 75-83. URL: http://vestnik.adygnet.ru Gupta R.A., Chow M.Y. Networked control system: Overview and research trends // IEEE Trans. Ind. Electron. 2009. Vol. 57. P. 2527-2535. Campion M., Ranganathan P., Faruque S. UAV swarm communication and control architectures: A review // Journal Unmanned Vehicle System. 2018. Vol. 7. P. 93-106. New radio (NR) and its evolution toward 5G-advanced / Y. Kim, J. Oh, H. Ji [et al.] // IEEE Wireless Communication. 2019. Vol. 26. P. 2-7. Raza U., Kulkarni P., Sooriyabandara M. Low power wide area networks: An overview // IEEE Communication Survey Tutor. 2017. Vol. 19. P. 855-873. Dovgal V.A. Making decisions about the placement of unmanned aerial vehicles based on the implementation of an artificial immune system in relation to information processing // Proceedings - 2021: International Conference on Industrial Engineering, Applications and Manufacturing. ICIEAM 2021. P. 828-833. Dovgal V.A. Decision-making for placing unmanned aerial vehicles to implementation of analyzing cloud computing cooperation applied to information processing // Proceedings - 2020: International Conference on Industrial Engineering, Applications and Manufacturing. ICIEAM 2020. P. 911-975. Chen X., Tang J., Lao S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols // Applied Sciences. 2020. Vol. 10, Iss. 10. P. 3661. Викулов А.С., Парамонов А.И. Стандарт IEEE 802.11ax и перспективы его применения для Интернета вещей // Интернет вещей и 5G: материалы Второй междунар. науч.-техн. конф. студентов, аспирантов и молодых ученых, г. Санкт-Петербург, 07 декабря 2016 года. Санкт-Петербург: СПбГУ телекоммуникаций им. проф. М.А. Бонч-Бруевича, 2016. С. 38-41. Логинов В.А., Ляхов А.И., Хоров Е.М. Совместное существование сетей Wi-Fi и LTE- LAA: открытые проблемы // Информационные процессы. 2018. Т. 18, № 3. С. 197-209. Оптимизация создания и применения спутниковых систем связи / И.А. Байгутлина, А.В. Григорошев, Е.О.Григорьев [и др.]. Москва: Сам Полиграфист, 2021. 200 с. DoD command, control, and communications (C3) modernization strategy. URL: https://dodcio.defense.gov/Portals/0/Documents/DoD-C3-Strategy.pdf (дата обращения: 08.02.2022). Динь Ч.З. Разработка методов построения и функционирования быстроразворачиваемой летающей сети для экстренных служб: специальность 05.12.13 «Системы, сети и устройства телекоммуникаций»: автореф. дис. ... канд. техн. наук. Санкт-Петербург, 2020. 22 с. Карлов А.М., Волхонская Е.В., Гоза Н.С. Модельные исследования коэффициента битовых ошибок в канале связи с мелкомасштабными рэлеевскими замираниями // Радиотехника. 2019. № 2. С. 52-55. DOI: 10.18127/j00338486-201902-10 Гребешков А.Ю., Боровская Я.А. Построение информационно-ориентированных сетей 5G-ICN // Вестник связи. 2021. № 11. С. 13-18. Scherb C., Faludi B., Tschudin C. Execution state management in named function networking, 2017 // IFIP Networking Conference (IFIP Networking) and Workshops, 2017. P. 1-6. DOI: 10.23919/IFIPNetworking.2017.8264867 |