Technical sciences
 Скачать 117.59 Kb. Скачать 117.59 Kb.
|

|
Топология сети Стратегия развертывания роев дронов со взаимодействием требует, чтобы беспилотные летательные аппараты взаимодействовали друг с другом напрямую или по каналам связи с несколькими промежуточными устройствами [4]. По этой причине топология может быть выполнена с различными уровнями сложности от сети, основанной на наземной связи, до нескольких сетей, полагающихся на связь «воздух-воздух». В последнем случае сеть может быть простой, охватывающей один кластер, или более сложной, включающей несколько кластеров или большую плоскую специальную сеть. Рассмотрим возможные варианты построения сетей в рамках указанной стратегии. Первый возможный из вариантов - это сеть на основе инфраструктуры, которая соответствует той же топологии, что и развертывание без взаимодействия (см. рис. 1), где все беспилотные летательные аппараты напрямую соединяются с наземной станцией управления. Разница в том, что при развертывании роев дронов со взаимодействием беспилотники могут взаимодействовать между собой через наземную станцию, которая отвечает за ретрансляцию всех сообщений. Однако передача всей управляющей информации через наземную станцию может привести к существенному снижению надежности системы из-за наличия единственной точки отказа. Процесс принятия решений может быть: централизованным - все решения принимаются наземным управлением на основе информации, предоставляемой всеми беспилотными летательными аппаратами; децентрализованным - каждый беспилотный летательный аппарат должен иметь возможность принимать свои собственные решения на основе информации, которой дроны обмениваются между собой через наземную станцию, которая в этом случае действует только как ретранслятор. Кластерная сеть - второй из возможных вариантов топологии в стратегии со взаимодействием. В этом случае все беспилотные летательные аппараты подключаются к выделенному дрону, который устанавливается в качестве параметра конфигурации во время развертывания системы или выбирается во время работы на основе состояния роя. Такой беспилотник выбирается для работы в качестве руководителя кластера соседних с ним беспилотных летательных аппаратов, что означает, что каждое сообщение, сгенерированное или завершенное в таких соседях, отправляется через главный дрон, который руководит кластером [12], но он же может стать и узким местом в рое дронов, блокируя соединения и повышая задержку в передаче сигналов. Исправить указанный недостаток можно расширением сети за счет включения нескольких кластеров, каждый из которых имеет своего собственного главного дрона в кластере. В обоих случаях (для одного или нескольких кластеров) руководители кластеров отвечают за установление связи между кластерами и между каждым кластером и наземным центром управления. Процесс принятия решений может осуществляться самими дронами распределенным образом: на основе индивидуальных решений или на основе консенсуса. Это возможно благодаря тому, что беспилотные летательные аппараты могут взаимодействовать друг с другом посредством главных дронов кластера, а не только через наземную станцию. На рисунке 2 представлена иллюстрация набора отдельных кластеров, образующих многокластерную сеть. 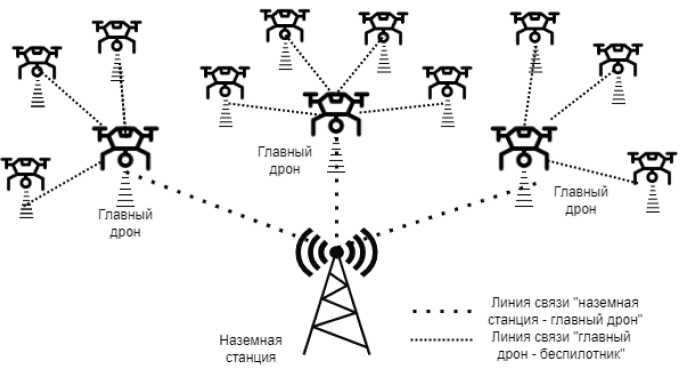 Рис. 2. Развертывание роев дронов со взаимодействием с применением нескольких кластеров Fig. 2. Deployment of drone swarms with multi-cluster interaction Сеть на основе Adhoc (сеть без точки доступа, сеть компьютер-компьютер) - третий из возможных вариантов топологии в стратегии развертывания роев дронов со взаимодействием, предполагающий плоскую организацию и отсутствие главных дронов кластеров. В такой топологии сбои в работе отдельных узлов будут оказывать незначительное влияние на всю систему в целом, что позволяет снизить требования к пропускной способности канала нисходящей связи и задержке из-за более коротких каналов связи между беспилотными летательными аппаратами. Преимущества стратегии развертывания сети на основе Adhoc: масштабирование сети, отказоустойчивость, автономность устройства, гибкость и меньшие затраты на настройку [13]. Сеть Adhoc позволяет значительно расширить охват роя дронов по сравнению с кластерной сетью благодаря возможности маршрутизации пакетов через несколько переходов. Однако трудности масштабирования при маршрутизации в плоской организации сети Adhoc можно преодолеть за счет создания множества отдельных кластеров, каждый из которых будет работать как единая сеть Adhoc. В этом случае каждая сеть Adhoc должна будет иметь одного или нескольких главных дронов кластера, которые будут функционировать как шлюзы. На рисунке 3 показана общая топология набора сетей без точки доступа, которые вместе могут образовывать сеть Adhoc на основе кластера. 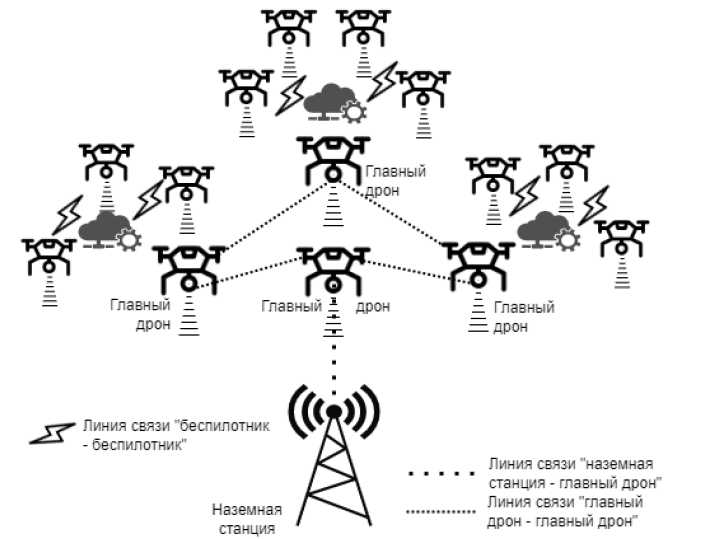 Рис. 3. Развертывание сети со взаимодействием без точки доступа на основе кластера Fig. 3. Deployment of a network that interacts without a cluster-based access point Основные технологии Для построения модели роя беспилотных летательных аппаратов как сети NCS необходимо учитывать требования, предъявляемые к связи, способные гарантировать максимальную производительность системы по беспроводной сети в воздухе. С сетевой точки зрения проблемы сбоев передачи, задержек, замирания каналов и ошибок в сообщениях могут привести к снижению общей производительности системы. Представляется важным использование беспроводной технологии, способной соединять все дроны вместе с помощью действенных механизмов, обеспечивающих эффективное взаимодействие между дронами [4]. Для развертывания стратегии роев дронов со взаимодействием рекомендуется использовать несколько технологий, включая IEEE 802.11 [14], 3G/LTE [15] и спутниковую связь [16]. Хотя возможны и альтернативные сетевые решения, обеспечивающие надежность и стабильность беспроводной связи, являющиеся ключевыми для работы группы БПЛА, использующие протоколы маршрутизации, способные обеспечивать безопасные маршруты передачи данных от источника к месту назначения. В стратегии развертывания со взаимодействием вычислительные ресурсы распределяются по различным беспилотным летательным аппаратам, а также в наземной станции управления, что требует назначения нескольких вычислительных задач для создания подходящего процесса принятия решений (с указанием мест и способов принятия решения). Такое требование обусловлено важностью координации вычислительных задач и наличием необходимых вычислительных ресурсов. Например, если выполнение задачи управления полетом могут быть гарантированы контроллером, находящимся на борту каждого дрона, то более трудоемкие задачи (типа распознавания изображений) требуют более мощных ресурсов, которые могут быть реализованы наземным оборудованием или совокупностью дронов, выступающих как единый комплекс обработки данных. Кроме того, координация вычислительных задач может выполняться на основе обмена информацией между дронами, во избежание лишней информации, снижающей эффективность работы роя дронов. Системные компоненты Рассмотрим свойства двух основных элементов роя дронов: сетевой системы и вычислительной системы, каждая из которых решает определенные задачи, соответствует некоторым требованиям и имеет ряд проблем. Сетевая система роя дронов Сетевая система строит граф связи для обмена данными между беспилотными летательными аппаратами, а также между дронами и наземной инфраструктурой. Она должна гарантировать замкнутый цикл управления потоком данных между осуществлением задачи мониторинга, принятием решений и приведением в действие этих решений. Один из вариантов решения этой проблемы состоит в перераспределении указанных функций между несколькими дронами, при условии сохранения совместного выполнения поставленной миссии. Например, беспилотный летательный аппарат может обнаружить новое препятствие, которое не мешает его собственному движению, но может оказать влияние на выполнение полета другим членам стаи. Эта информация предоставляется другому беспилотному летательному аппарату, способному вычислить действие, которое может быть выполнено набором других дронов, находящихся на пути такого препятствия. В стае связь необходима не только для распространения наблюдений, задач и информации об управлении, но также может помочь в более эффективной и безопасной координации беспилотных летательных аппаратов. Требования к связи значительно различаются в разных приложениях. Однако обеспечение надежной сети является особенно сложной задачей из-за ограничения энерговооруженности беспилотников и внешних факторов, таких как беспроводное затенение и прерывистость доступных каналов связи. Проанализируем сетевые требования и ограничения сетевой системы, а также покажем основные принципы ее работы и ключевые свойства. Сетевые требования Трафик данных, связанный с работой этой системы, можно разделить на два основных типа [4]: трафик управления, предназначенный для отслеживания и изменения поведения дронов пунктом наземного контроля, а также мониторинга информационных сообщений о состоянии дрона; трафик координации, включающий информацию, связанную с взаимодействием дронов и предотвращением их столкновений. Дополнительно осуществляется обмен данными между беспилотниками о полезной нагрузке и услугам, реализуемым на борту (типа данных, полученных в результате наблюдений за физической средой, и данных, генерируемых и потребляемых устройствами, находящимися на борту летательного аппарата). Что касается линий связи «воздух-земля», то Международный союз электросвязи в рамках Партнерского проекта 3-го поколения (3GPP) [17] классифицировал командно-диспетчерскую связь, а также связь с полезной нагрузкой для безопасных операций беспилотных летательных аппаратов с точки зрения пропускной способности, надежности и задержки (см. табл. 1). Перечисленные требования к производительности направлены на гарантирование своевременной связи, качественную обработку данных и реализацию скоординированного движения в режиме реального времени. Хотя информация, предоставленная 3GPP, относится к линиям связи «воздух-земля» в стратегии развертывания без взаимодействия (см. рис. 1), следует ожидать, что к любым линиям связи между беспилотными летательными аппаратами будут предъявляться те же требования к качеству. Таблица 1 Требования к связи «воздух-земля» для операций беспилотных летательных аппаратов, определенные 3GPP [17] Table 1. Air-to-ground communications requirements for unmanned aerial vehicle operations defined by 3GPP [17]
Предполагается, что для выполнения миссии роем дронов первостепенное значение необходимо уделять связи по каналам «воздух-воздух», поскольку беспилотные летательные аппараты требуют обмена информацией между собой, чтобы иметь возможность принимать локальные решения; рои беспилотных летательных аппаратов требуют надежной беспроводной связи для распределенной координации и обработки в реальном времени для достижения общесистемных целей [4]. Следовательно, для обеспечения роем широкополосной связи, поддерживающей скоординированную и распределенную обработку данных в реальном времени, сетевая система должна иметь характеристики производительности сети, охватывающие надежность, высокую пропускную способность и низкие задержки, чтобы обеспечить более тесное сотрудничество и синхронизацию для эффективного управления воздушными узлами. Сетевые проблемы С точки зрения обеспечения надежности выполнение полета беспилотным летательным аппаратом является затруднительным из-за прерывистого характера используемых беспроводных линий связи, что может привести к снижению производительности передачи по сети. На синхронное маневрирование соседними беспилотными летательными аппаратами могут оказать влияние и такие аспекты, как наличие эффекта Доплера или сложности настройки антенны. Предполагается, что обеспечение мобильности беспилотников можно решать на основе повышения пропускной способности передачи данных и расширения канала связи за счет внедрения функций хранения, переноса и пересылки (store-carry-and-forward, SCF) в беспилотных летательных аппаратах [18]. Следовательно, беспилотные летательные аппараты подвержены отказам исполнительных механизмов и системным неопределенностям, что влияет на способность системы поддерживать удовлетворительную производительность. Неопределенности присущи самой системе беспилотного летательного аппарата из-за параметрических изменений массы и инерции, скорости, высоты и динамики положения, углов возвышения и случайного шума от самолета во время полета. Беспилотный летательный аппарат также может подвергаться внешним воздействиям погоды и системным неопределенностям, а именно связанным со свойствами используемых беспроводных каналов, такими как крупномасштабные и мелкомасштабные замирания. Крупномасштабное и мелкомасштабное замирание каналов способствует повышению надежности передачи и оказывает значительное влияние на связь «воздух-земля» и эксплуатационные характеристики систем с несколькими беспилотными летательными аппаратами [19]. Крупномасштабное затухание обычно приводит к таким проблемам, как затухание в свободном пространстве, затухание и затенение. Явление затухания в свободном пространстве зависит от условий линии прямой видимости, а также от эффектов отражения поверхности земли, снижающих силу передачи при распространении волн в свободном пространстве. Ослабление, с другой стороны, происходит из-за потери мощности передачи радиосигнала при его прохождении в полосе частот. Основной причиной ослабления при передаче сигналов «воздух- воздух» и «воздух-земля» являются атмосферные условия, такие как дождь и газы. Кроме того, эффект затенения может быть вызван самим корпусом БПЛА и несоосно- стью из-за углового расположения антенн на БПЛА. Тем не менее, основное ограничение эффектов затенения при связи беспилотных летательных аппаратов «воздух-земля» в значительной степени объясняется ограничениями в отношении приемлемых рабочих высот беспилотника, которые ограничивают его работу на меньших высотах и, следовательно, склонны к затенению препятствий от высотных зданий и наземных объектов на пути передачи данных «воздух-земля». Наземные линии связи вызывают рассеивание сигнала, что влияет на эффективность связи. |