Technical sciences
 Скачать 117.59 Kb. Скачать 117.59 Kb.
|

  ISSN 2410-3225 Ежеквартальный рецензируемый, реферируемый научный журнал «Вестник АГУ». Вып. 1 (296) 2022 ТЕХНИЧЕСКИЕ НАУКИ TECHNICAL SCIENCES Обзорная статья УДК 004.031.6+623.746.4-519:004 ББК 32.971.322.5+39.52-05 Д 58 DOI: 10.53598/2410-3225-2022-1-296-62-76 Интеграция сетей и вычислений для построения системы управления роем дронов как сетевой системы управления (Рецензирована) Виталий Анатольевич Довгаль Майкопский государственный технологический университет, Адыгейский государственный университет, Майкоп, Россия, urmia@mail.ru Аннотация. В последнее время усиливается значение практического применения мультиагентных систем, таких как рои дронов, что обусловлено появлением множества устройств, способных коммуницировать между собой с целью их кооперативного поведения. Однако автоматизация управления роем дронов является сложной задачей из-за наличия постоянно изменяющихся условий окружающей среды и ограничений каналов беспроводной связи, используемых каждым беспилотным летательным аппаратом в стае. Для решения указанных проблем в статье предлагается рассматривать рой дронов как сетевую систему управления (Networked Control Systems, NCS), в которой управление всей системой осуществляется в рамках сети беспроводной связи. Такой подход обусловлен тесной взаимосвязью между сетевыми и вычислительными системами, используемыми для эффективной поддержки основных функций управления роем: сбора и обмена данными, принятия решений по распределению команд управления и т.п. Представлен обзор принципов разработки самоорганизующегося роя дронов в качестве NCS посредством интеграции сетевой системы и вычислительной системы. Кроме того, проводится анализ интеграции указанных систем для повышения производительности роя дронов. Ключевые слова: рой беспилотных летательных аппаратов, сетевые системы управления, беспроводные сети, внутрисетевые вычисления Review Paper Integration of networks and computing to build a drone swarm management system as a network management system Vitaliy А . Dovgal Maikop State University of Technology, Adyghe State University, Maikop, Russia, urmia@mail.ru Abstract. Recently, the importance of the practical application of multi-agent systems, such as swarms of drones, has been increasing, due to the emergence of many devices capable of communicating with each other for the purpose of their cooperative behavior. However, automating drone swarm control is challenging, due to the presence of constantly changing environmental conditions and the limitations of the wireless communication channels used by each unmanned aerial vehicle in the flock. To solve these problems, the paper proposes to consider a swarm of drones as a network control system (Networked Control Systems, NCS), in which the entire system is controlled within a wireless communication network. This approach is due to the close relationship between network and computing systems used to effectively support the main functions of swarm management: data collection and exchange, decision-making on the distribution of control commands, etc. The paper provides an overview of the principles of developing a self-organizing drone swarm as an NCS through the integration of a network system and a computing system. In addition, the paper analyzes the integration of these systems to improve the performance of a swarm of drones. Keywords: drone swarms, networked control systems, wireless networks, in-network computing Введение Беспилотные летательные аппараты (БПЛА, дроны) - это автономные или удаленно пилотируемые летательные аппараты, которые имеют большой набор сценариев применимости благодаря своей универсальности, низкой стоимости и простоте развертывания [1]. Сценарии применимости охватывают как военные, так и гражданские области [2]. В военных целях БПЛА предотвращают гибель и ранения личного состава, а также используются для распознавания объектов наблюдения. Гражданское применение дронов еще более разнообразно и включает в себя сбор актуальной информации об объектах, находящихся на поверхности Земли, обеспечение беспроводной связи (изображения и видео, из удаленных мест), доставку товаров и управление дорожным движением [3]. Индивидуальные ограничения беспилотных летательных аппаратов приводят к трудностям при выполнении длительных задач, таких как охват больших географических районов и своевременное предоставление важной информации. Для более эффективного выполнения указанных задач все чаще и чаще в настоящее время дроны используются для выполнения некоторого задания (например, поисковой операции) не поодиночке, а в составе организованной группы, которую можно назвать роем (или стаей) [4]. Каждый беспилотник в рое может быть рассмотрен как простой агент в сетевой системе управления, а совокупность всех агентов роя представляет собой мультиагент- ную систему, в которой все необходимые задачи распределяются между всеми дронами на основе интеграции сетевой и вычислительной систем, что позволяет решать сложные задачи, поставленные перед стаей дронов [5]. Таким образом, разработка интегрированной системы управления роем дронов позволит повысить эффективность усилий по координации поведения беспилотных летательных аппаратов, что позволит обеспечить более широкий охват территории, более высокую гибкость и надежность за счет резервирования. Разрабатываемые системы управления роем беспилотных летательных аппаратов могут быть построены на основе как децентрализованного управления полетом, так и с единым центром управления (как централизованная система). Поскольку в большинстве случаев используются беспроводные каналы коммуникации, то помимо прочих вопросов необходимо решать технические проблемы, связанные с обеспечением безопасности передачи данных и вычислительной производительности агентов стаи (например, [6]). Кроме того, много усилий направлено на преодоление ограничений, связанных с масштабируемостью системы агентов, обусловленной изменением качества беспроводных каналов связи, а также предотвращение столкновений и управление формированием стаи, потенциально влияющие на успешность выполнения миссии. Использование самоорганизующегося поведения системы роя беспилотных летательных аппаратов требует интеграции сетевых и вычислительных систем. Желательным представляется также использование какого-либо известного контроллера, который достаточно часто обновлял бы статус всей системы роя [4]. Тесная консолидация сетевой и вычислительной системы позволит получить синергетический эффект, проявляющийся в том, что каждая из этих двух систем должна извлекать выгоду из присутствия другой: например, сетевая система должна иметь возможность находить лучшие каналы передачи к близлежащим беспилотным летательным аппаратам и/или лучшие пути обмена данными с удаленными агентами при использовании оценок (или прогнозов на основе некоторого алгоритма искусственного интеллекта) от вычислительной системы о качестве используемых путей беспроводной передачи данных. Настоящая статья описывает современный подход к разработке самоорганизующихся роев дронов в качестве сетевых систем управления посредством интеграции сетевых и вычислительных систем, включая их эффекты взаимодействия. Рой беспилотных летательных аппаратов как сетевая система управления Стая дронов в большинстве случаев ориентирована на выполнение некоторой поставленной миссии, которая может отличаться масштабом и сложностью, требуя развертывания сетей с различными стратегиями - начиная от невзаимодействующего применения (один или группа невзаимодействующих беспилотных летательных аппаратов связаны с наземным центром управления (см. рис. 1)) и заканчивая многокластерным взаимодействующим применением нескольких стай, использующихся для более масштабных миссий (см. рис. 3) и представляющих собой крайне сложную систему, передающую данные через наземную или спутниковую платформу. В таких миссиях рой беспилотных летательных аппаратов может быть смоделирован как сетевая система управления (Networked Control Systems, NCS) [7]. Модель сетевой системы управления NCS - это вычислительная система, управление в которой реализуется в замкнутом контуре через сеть связи. В рое дронов, рассматриваемом в модели NCS, управляющие воздействия и сигналы обратной связи передаются между системными вычислительными блоками или агентами в форме информационного пакета. Типичная NCS обеспечивает свою функциональность с помощью двух основных элементов: вычислительной системы, предназначенной для сбора данных с помощью датчиков, принятия решения и исполнения команды с помощью исполнительных механизмов; сети, предназначенной для обмена информацией, в которую включены модули связи, использующие стандарты и протоколы (например, управление доступом к среде и маршрутизация). За обработку данных отвечают установленные на каждом дроне бортовые компьютеры, обладающие микросервисами для выполнения конкретных задач, таких как зондирование, принятие решений (например, управление полетом), воздействие на окружающую среду или на сам рой [8]. Интеграция дронов в сеть позволяет изменить функционирование всей стаи за счет эффективной реализации замкнутого цикла, типичного для NCS. Преимуществом такого объединения является повышение эффективности действий каждого дрона, позволяя им вести себя как группа из нескольких агентов, которые работают вместе, стремясь достичь общей цели. Развертывание роев дронов в значительной степени зависит от беспроводных и сетевых технологий для передачи определенных данных и команд управления между дронами или между дронами и наземным управлением, что приводит к развертыванию роев дронов на основе двух стратегий: без взаимодействия и с взаимодействием. Стратегия развертывания роев дронов без взаимодействия Указанная стратегия предполагает подключение каждого беспилотника стаи напрямую к наземной станции управления, которая используется для мониторинга их статуса (например, местоположения, состояния датчиков, сетевых конфигураций), принятия решений и отправки новых команд, таких как новые путевые точки. Рассматриваемая стратегия является простым примером сети, которая не может быть дополнительно разделена. Такого рода стратегию можно рассматривать как единую NCS, предполагающую, что каждый беспилотный летательный аппарат может создать замкнутый контур управления для оптимизации своей работы. Так как дрону все еще необходимо взаимодействовать с наземным центром управления, то необходимо поддерживать связь для выполнения миссии, используя системы сбора, связи, обработки данных и управления. Топология сети В стратегии развертывания роев дронов без взаимодействия беспилотные летательные аппараты управляются наземной станцией, что предполагает существование эффективных каналов восходящей и нисходящей связи, как показано на рисунке 1, что позволяет наземному пункту управления передавать параметры полета беспилотникам и принимать от них данные. В случае совместного использования нескольких беспилотных летательных аппаратов связь между ними не может осуществляться напрямую или через наземную станцию. На рисунке 1 показан случай с несколькими беспилотными летательными аппаратами. 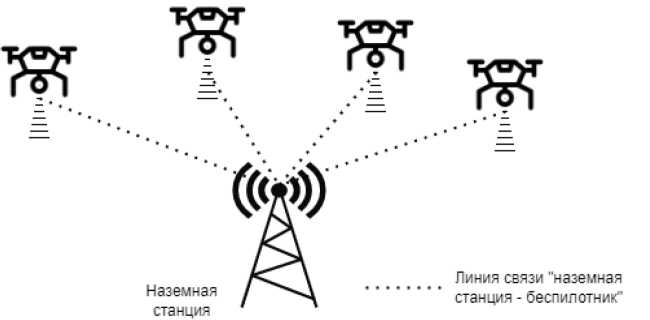 Рис. 1. Развертывание роев дронов без взаимодействия Fig. 1. Deployment of drone swarms without interaction В этой простой стратегии развертывания имеется двунаправленная линия связи от каждого дрона к наземной системе управления, позволяющая напрямую передавать данные и команды управления, относящиеся к конкретному приложению. Эту стратегию рекомендуется использовать при малой площади охвата, выполняющейся миссией для несложных сценариев. Основное ограничение этой стратегии - наземная станция управления является единственной точкой отказа, в которой может произойти отключение всей сети вместе с задержками передачи, достигающими высшей точки из-за длинных беспроводных линий связи, направленных на охват более широкой области. С точки зрения связи стратегия развертывания без взаимодействия основывается на точной модели канала «воздух-земля», конструкции антенны и модели мобильности. Основные стратегии, применяемые этой технологией Рассматриваемая стратегия предполагает следующий алгоритм: беспилотники собирают соответствующую информацию от самих себя и из окружающей среды; беспилотник устанавливает связь с наземной станцией управления для обработки собранных данных; наземная станция передает результат работы вычислительной системы обратно на дроны; локальные исполнительные механизмы беспилотников отрабатывают соответствующие команды управления от наземной станции. Для реализации указанного алгоритма подойдут такие сотовые технологии, как LTE, обеспечивающие улучшенную пропускную способность системы, покрытие, высокие скорости передачи данных и снижение задержки развертывания [9]. Например, LTE обеспечивает скорость передачи данных в диапазоне от 0,07 до 1 Гбит/с с зоной охвата до 350 км по гибкому спектру. Кроме того, может быть использована маломощная территориально распределенная сеть (Low Power Wide-Area Network, LPWAN), такая как LoRaWAN, обеспечивающая широкополосную связь, работающая в нелицензионных полосах частот, с низкой скоростью передачи данных, энергопотреблением и пропускной способностью [10]. Например, LoRaWAN обеспечивает скорость передачи данных, которая варьируется от 0,3 Кбит/с до 50 Кбит/с. В том, что касается вычислительной системы, эта стратегия развертывания может основываться просто на точных моделях мобильности или функциях планирования пути, основанных на интеллектуальных алгоритмах, таких как оптимизация методом роя частиц (Particle Swarm Optimization, PSO), оптимизация колонии муравьев (Ant Colony Optimization, ACO) и оптимизация пчелиной колонии (Bee Colony Optimization, BCO) (например, см. [11]). Указанная стратегия предполагает полностью автономное поведение дронов внутри роя, каждый из которых принимает собственные решения (например, о корректировке траектории) на основе восприятия ими окружающей среды, включая положение соседних беспилотников. Применение указанной стратегии позволяет интегрировать дроны в стае за счет координации своих действий при совместном подходе к зондированию, мониторингу, а также обмену информацией. Это позволит рою прийти к консенсусу относительно наилучшего способа выполнения миссии при обнаружении препятствий на пути к выполнению поставленной миссии. Для эффективного обмена данными автономный рой беспилотных летательных аппаратов должен полагаться на сетевую систему, которая не зависит от работы наземной станции, за исключением чрезвычайных ситуаций. В полностью автономной системе рой полагается на бортовые сети на основе прямой видимости с потенциально сильными параметрами, которые облегчают передачу данных, а также имеют возможность генерировать подходящие таблицы маршрутизации, позволяющие дронам принимать решения на основе хорошего понимания их ближайшего соседа. Эта локализованная операция, типичная для самоорганизующихся систем, не требует сетевой системы, способной создавать полное изображение всего роя дронов, что является преимуществом в динамических настройках. Независимо от рассматриваемой топологии сети для бортовой сети определение надежной системы беспроводной связи, обеспечивающей автономное взаимодействие дронов в условиях динамического распространения, имеет важное значение для достижения эффективных операций роя. Следовательно, стратегия развертывания со взаимодействием приводит к более гибкому поведению стаи, обеспечению более высокой компактности расположения и дальностью действия, чем стратегия без взаимодействия. |