Технические средства автоматизации и управления
 Скачать 0.58 Mb. Скачать 0.58 Mb.
|

|
Жесткие ОС в ДМУ. На рис. 3а,б приведены схемы ДМУ с жесткими ОС по току. Маркировка обмоток в этих схемах дана применительно к случаю, когда ОС являются положительными. Из определения коэффициента ОС следует:  , где IH - приращение тока в рабочей обмотке (в нагрузке) в средних значениях; , где IH - приращение тока в рабочей обмотке (в нагрузке) в средних значениях;  - число витков обмотки ОС; lOC, lOC - длина средней силовой линии для магнитного потока соответственно от рабочей обмотки и обмотки ОС. - число витков обмотки ОС; lOC, lOC - длина средней силовой линии для магнитного потока соответственно от рабочей обмотки и обмотки ОС.Если учесть, что в схеме рис. 3а  , а в схеме рис. 3б , а в схеме рис. 3б  , где , где  - коэффициент формы тока, то для этих схем не трудно установить: - коэффициент формы тока, то для этих схем не трудно установить: , здесь КВ - коэффициент выпрямления. Он может быть найден по прямому и обратному току выпрямителя: , здесь КВ - коэффициент выпрямления. Он может быть найден по прямому и обратному току выпрямителя: . .В большинстве случаев исполнения МУ  и тогда и тогда  . .Выражения для КОС при других видах жесткой ОС записываются аналогично. Жесткие ОС в МУС. Коэффициент внутренней ОС. Самоподмагничивание в МУС эквивалентно действию жесткой ОС связи по току и поэтому может характеризоваться коэффициентом внутренней ОС:  , где , где  - магнитная напряженность подмагничивания сердечников от рабочих обмоток; - магнитная напряженность подмагничивания сердечников от рабочих обмоток;  - приведенный к магнитной напряженности сигнал выхода в средних значениях. - приведенный к магнитной напряженности сигнал выхода в средних значениях. Так как  , где , где  - постоянная составляющая тока в рабочей обмотке за период питающего напряжения; - постоянная составляющая тока в рабочей обмотке за период питающего напряжения; - ток выхода в средних значениях, то - ток выхода в средних значениях, то  . .Если пренебречь активным сопротивлением вторичной полуобмотки трансформатора, то  . .Из этого выражения следует, что если сопротивление нагрузки соизмеримо с боратными сопротивлениями вентилей, то это приводит к заметному снижению  . .Выражение для записано в предположении, что прямое и обратное сопротивления вентилей являются величинами постоянными. Это обстоятельство, а также принятая идеализация процессов в МУС, приводит при численном нахождении к весьма приближенным результатам.Коэффициент внешней ОС в МУС. Необходимость во внешней жесткой ОС в МУС возникает в тех случаях, когда требуется существенно уменьшить крутизну характеристики вход-выход или, наоборот, перевести этот усилитель в релейный режим. Примеры исполнения внешней ОС в схемах МУС приведены на рис. 3в,г. Коэффициент внешней ОС в МУС  Полагаем, что характеристики вентилей, используемых в усилителе одинаковые, значения ωР, ωР и lС известны. Для мостовой схемы рис. в которой  и и  коэффициент внешней ОС коэффициент внешней ОС Коэффициенты ОС по току, напряжению и мощности, постоянная времени и добротность соответственно определяются:  , , , , , , , , Вывод: Изучил принципы действия электроприводов с магнитными усилителями (МУ) и экспериментальное исследование привода с МУ. Лабораторная работа № 3 ИЗУЧЕНИЕ И ИССЛЕДОВАНИЕ ПРЕОБРАЗОВАТЕЛЕЙ ФАЗА-КОД Цель работы. Знакомство с конструкцией, принципом действия и режимами работы первичных преобразователей перемещения (ППШ в параметры выходного напряжения, изучение принципов преобразования фазового сдвига выходных напряжений ППП в двоичный код и принципиальных электрических схем преобразователей фаза-код на примере блока преобразования сигнала фазового сдвига с датчиков положения типа БСГК, BTM-IM, используемого;в измерительных устройствах металлорежущих станков (МРС), в двоично-десятичный код в системах числового программного управления (ЧПУ) типа 2Р-22, 2С-42-65. 1. ОБЩИЕ ПОЛОЖЕНИЯ Для связи датчиков обратной связи (ДОС) с современными системами ЧПУ МРС и ПР используются цифровые преобразователи перемещения (ЦПП). ЦДЛ строятся по трем основным схемам: с непосредственным преобразованием перемещения в код, с косвенным преобразованием и комбинированным [1]. В ЦПП первой группы цифровому преобразованию подвергается само механическое перемещение. ЦПП второй группы перемещение образуют в удобный .аналоговый параметр (амплитуда или фаза выходного напряжения), который в дальнейшем преобразуется в цифровой эквивалент. Третья группа представляет различные сочетания первых двух. Применение ЦПП второй группы на сегодняшний день более предпочтительно вследствие линейности выходной характеристики, высоких разрешающих способностей, быстродействия и надежности. С другой стороны, высокие помехоустойчивость, точность, простота осуществления многоканального преобразования и соединения первичного преобразователя с электронной схемой, высокий уровень унификации и технологичности делают более предпочтительным использование в системах ЧПУ ЦПП с промежуточным преобразованием перемещения в фазовый сдвиг. Преобразование перемещения в код здесь осуществляется в два этапа: на первом этапе измеряемое перемещение преобразуется в фазовый сдвиг выходного напряжения ППП относительного опорного, а на втором - выделенный фазовый сдвиг - в двоичный код. 2. ЭЛЕКТРОМАГНИТНЫЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕЩЕНИЙ Для формирования фазового сдвига пропорционального перемещению рабочих органов МРС и ПР в их исполнительных системах в качестве датчиков обратной связи по положению широкое применение находят электромагнитные первичные преобразователи перемещений (ЭППП) трансформаторного типа: одно и многополюсные вращающиеся трансформаторы (ВТ), сельсины, редуктосины и индуктосины. Особенностью многополюсных ВТ, редуктосинов и индуктосинов является реализация принципа электрической редукции, что позволяет уменьшить погрешность измерения в число раз, пропорциональное передаточному отношению электрической редукции. Недостатком перечисленных ЭППП является большая величина коэффициента ослабления выходного сигнала. В зависимости от способа питания первичных обмоток различают два основных режима работы ЭПП: амплитудный и фазовый. Высокая помехозащищенность, а следовательно, и точность обусловили более широкое распространение фазового метода измерения перемещения в электромагнитных преобразователях перемещений (ЭПП). По числу фаз питания фазовые ППП делятся на одно и многофазные. Основные сведения о параметрах и характеристиках ФППП, а также возможные варианты структурных схем их включения приведены в литературе 121. 3. ПРЕОБРАЗОВАТЕЛИ ФАЗА-КОД (ПФК) Служат для реализации второго этапа измерения перемещений: преобразования аналогового сигнала на выходе ЭППП в цифровой код. В зависимости от структуры построения различают ПФК компенсационного типа и прямого преобразования. В свою очередь, по принципу преобразования кодового сигнала первые подразделяют на ПФК с механическим и цифровым эталонным фазовращателем, а ПФК прямого преобразования - на ПФК с промежуточным, время-импульсным преобразованием и ПФК с преобразованием частоты [1]. Высокая точность преобразования и простота конструкции определили более широкое распространение в технике ПФК прямого измерения с время-импульсным преобразованием, работающих по схеме: фазовый сдвиг - временный интервал - код. Различают две группы таких преобразователей: с изменением фазового сдвига за один период изменения рабочего напряжения (рис.5.1) и с изменением за несколько периодов (рис.5.2). В преобразователях первой группы нуль-органы Н01 и Н02 фиксируют моменты перехода от положительной полуволны к отрицательной опорного Uo и измерительного Uu напряжений фазовращателя (ФВ) через ноль и выдают короткие импульсы на входы триггера Т. При этом на выходе триггера формируется импульс, длительность которого пропорциональна фазовому сдвигу между Uo и Uu. Временной интервал, равный длительности импульса на выходе Т,с помощью генератора (G) импульсов и схемы совпадения преобразуется в последовательность импульсов высокой частоты. При этом число импульсов, подсчитанных двоичным счетчиком СТ, связано с преобразуемым фазовым сдвигом выражением N = (θ/2π)fGfо1, где fG и f0 - частоты генератора импульсов и опорного напряжения ФВ, θ - фазовый сдвиг. Точность преобразования таких ПФК зависит от стабильности частот fG и fQ, погрешности, обусловленной неоднозначностью считывания, ограниченностью времени преобразования, неопределенностью старт и стоп импульсов относительно импульсов G [1]. Применение ПФК с измерением фазы за несколько периодов изменения U0 (рис.5.2) позволяет в значительной степени уменьшить большинство из перечисленных погрешностей преобразования. 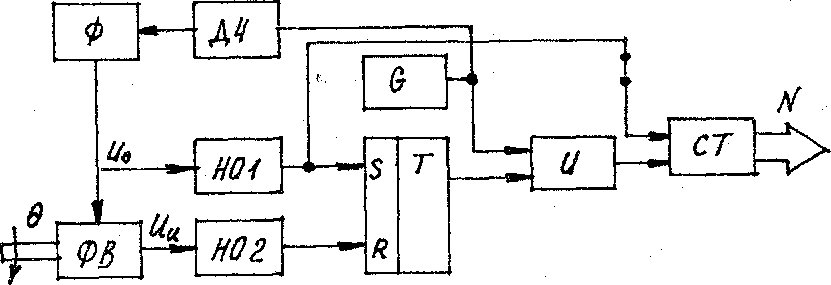 Рис. 5.1. Функциональная схема ПФК с изменением фазового сдвига за один период изменения UO: Ф - фильтр; ДЧ - делитель частоты; ФВ - фазовращатель; HOi - ноль-орган; Б - генератор импульсов; Т - триггер; И - схема совпадения; СТ - двоичный счетчик 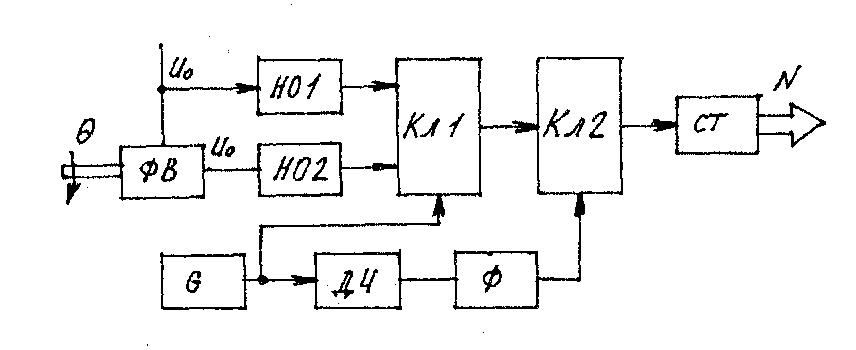 Рис. 5.2. Функциональная схема ПФК с постоянным временем измерения (Кл1,Кл2 - ключевые схемы) Период усреднения Ту здесь формируют с помощью схемы, состоящей из делителя ДУ, формирователя Ф и триггера К 2, на выходе которого формируется импульс длительностью Ту = К fG-1, (2) где К - коэффициент деления ДУ. При этом число импульсов,'поступающих на вход ДС, равно N = (θ/2π). (fQ/fO).(Ту/То) = ((θ/2 π) (fG/fO)- (K/fG)) fo = = К.(θ/2π) . (3) 4. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ В основу лабораторной установки положен блок связи с датчиками обратной связи (БСКТ) УЧПУ 2Р-22, применяемый для программного управления МРС и ПР. Блок состоит из схемы питания датчиков, формирующей сигналы Sin 15700t и Cos 15700t для питания обмоток возбуждения БСКТ, фильтра компаратора (ФК), предназначенного для фильтрации опорного сигнала с; последующим преобразованием синусоидального сигнала в прямоугольный, схемы оцифровки (ОИ) "999" и "999,", предназначенной для полного преобразования изменения фазы в функции перемещения в двоично-десятичный код, и фильтров компаратора измерительного сигнала [2]. В основу принципа действия блоков положена функциональная схема ПФК время-импульсного типа (см.рис.5.1, 5.2). Для формирования высокочастотного сигнала в стенде используется штатная плата УЧПУ 2Р-22 генератора импульсов (G) [2,3]. Контроль угла поворота вала ЕСКТ осуществляется с помощью панели индикаторов ИН-14, связанных с выходами блока согласования через дешифратор DC, выполненный на микросхемах К155ИД1. Функциональная схема стенда приведена на рис.5.3. Принципиальные электрические схемы заимствованных блоков приведены в техническом описании УЧПУ 2Р-22 СЗЗ. 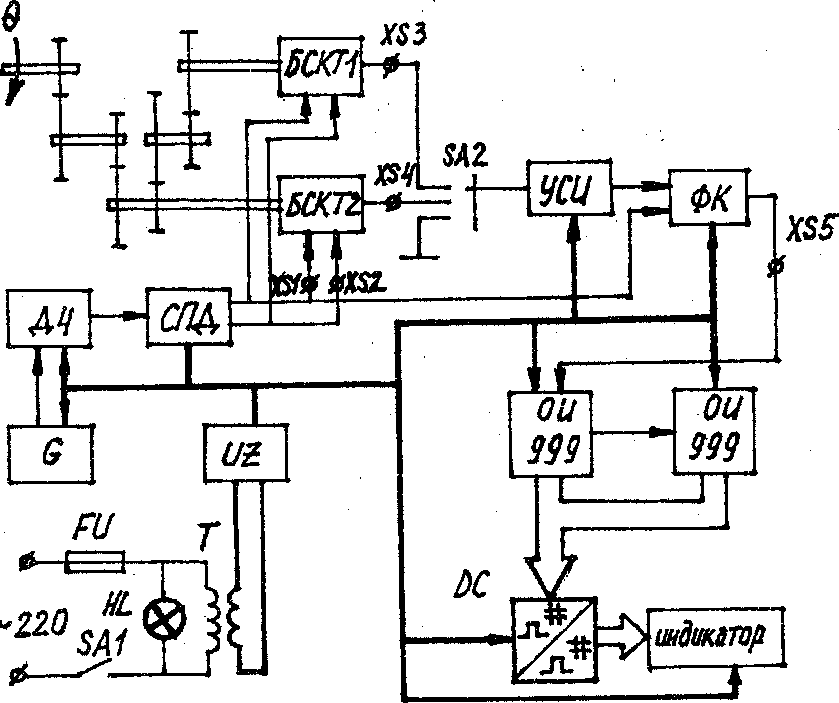 Рис. 5.3. Функциональная схема лабораторного стенда ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ 1. Изучить конструкцию, принцип действия, режимы. работы электромагнитных преобразователей перемещений [1]. 2. Изучить функциональные электрические схемы платы оцифровки измерительного сигнала и принципиальную электрическую схему: платы питания датчиков (ЕСКТ) УЧПУ 2Р-22 [2,3]. 3. Включить стенд. При этом должна загореться лампа сигнализации на лицевой панели стенда. 4. С помощью осциллографа снять" и построить временные диаграммы изменения напряжений в контрольных точках Х51...XS5 блока связи при различных положениях ротора датчика обратной связи (БСКТ). Построить статическую характеристику преобразователя. 5. Снять статическую характеристику преобразователя при отклонении фазового сдвига напряжения возбуждения фазовращателя от 90°. Построить графики статических погрешностей преобразователя. 6. Снять статическую характеристику преобразователя при несовпадении амплитуд напряжения возбуждения фазовращателя. Построить графические зависимости для статической погрешности преобразователя. 7. По полученным диаграммам объяснить функциональное назначение основных узлов измерительной системы УЧПУ 2Р-22. Вывод:. Ознакомился с конструкцией, принципом действия и режимами работы первичных преобразователей перемещения (ППШ в параметры выходного напряжения, изучение принципов преобразования фазового сдвига выходных напряжений ППП в двоичный код и принципиальных электрических схем преобразователей фаза-код на примере блока преобразования сигнала фазового сдвига с датчиков положения типа БСГК, BTM-IM, используемого;в измерительных устройствах металлорежущих станков (МРС), в двоично-десятичный код в системах числового программного управления (ЧПУ) типа 2Р-22, 2С-42-65. |