задания для заочников ТАУ. Техническое задание на проектирование
 Скачать 0.51 Mb. Скачать 0.51 Mb.
|

|
ВВЕДЕНИЕ Задача синтеза системы автоматического управления (САУ) заключается в выборе такой ее структуры, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявляемым к системе. Обычно определенная часть проектируемой системы задана. Она является исходной или нескорректированной САУ. Параметры ее функциональных элементов известны. В такой постановке задача проектирования сводится к определению корректирующего устройства (КУ), обеспечивающего заданные показатели качества системы. Наиболее простым, наглядным и хорошо разработанным инженерным методом синтеза САУ является метод логарифмических амплитудных частотных характеристик (ЛАЧХ). Его идея основана на однозначной связи между переходным процессом в системе и ее ЛАЧХ. Исходя из этого, по заданным точностным и динамическим показателям сначала строится желаемая ЛАЧХ, а затем путем графического построения осуществляется приближение к ней частотных характеристик исходной системы. В результате такой процедуры определяется ЛАЧХ КУ. Корректирующее устройство может включаться в канал управления последовательно или встречно-параллельно. Вид коррекции предопределяет некоторые особенности синтеза, обусловленные методикой получения ЛАЧХ КУ. В рамках проектирования синтез САУ осуществляется согласно заданию кафедры, которая определяет как содержание, так и объем курсовой работы (КР). Решаемые при этом задачи преследуют учебные цели, которые в основном сориентированы на закрепление и расширение знаний студентов по теории автоматического управления, развитие навыков самостоятельной работы с технической литературой, практическое применение современных инженерных методов, в том числе ЭВМ, при разработке и исследовании реальных САУ. ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ Техническое задание включает в себя исходные данные, позволяющие провести синтез системы. К ним относятся функциональная схема нескорректированной САУ, сведения о принципе ее действия, уравнения всех звеньев системы и их параметры, характеристики входных и возмущающих воздействий, показатели качества проектируемой САУ. Для систем стабилизации задаются, как правило, максимальная относительная ошибка системы ν (в %), перерегулирование σ (в %) и время переходного процесса tп. Кроме того, могут быть предъявлены некоторые другие требования, которые вводятся для индивидуализации содержания КР. В частности, в данной работе время tп минимизируется при заданных ν и σ с учетом ограничений на значения выходного напряжения усилителя. ВАРИАНТЫ ЗАДАНИЙ
РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ В ПЕЧИ На рис. 1 приведена схема САР температуры в печи для обжига кирпича. В данной системе печь представляет собой объект регулирования, регулируемой величиной которого является температура θ в печи, а регулирующим (управляющим) воздействием - линейное перемещение клапана μ, от величины которого зависит количество топлива, подаваемого в форсунку, а следовательно, и количество теплоты, выделяемой при его сгорании. Внешним возмущающим воздействием fявляется совокупность разнообразных факторов: исходной влажности, температуры обжигаемого кирпича, изменения температуры и влажности атмосферного воздуха. При исследовании системы можно ограничиться учетом влияния на объект регулирования исходной влажности кирпича, рассматривая ее как основное возмущающее воздействие. Функции воспринимающего органа (ВО) в САР выполняет медный терморезистор R1, включенный в мостовую схему, обеспечивающую задание требуемого значения температуры в печи посредством резистора R2. 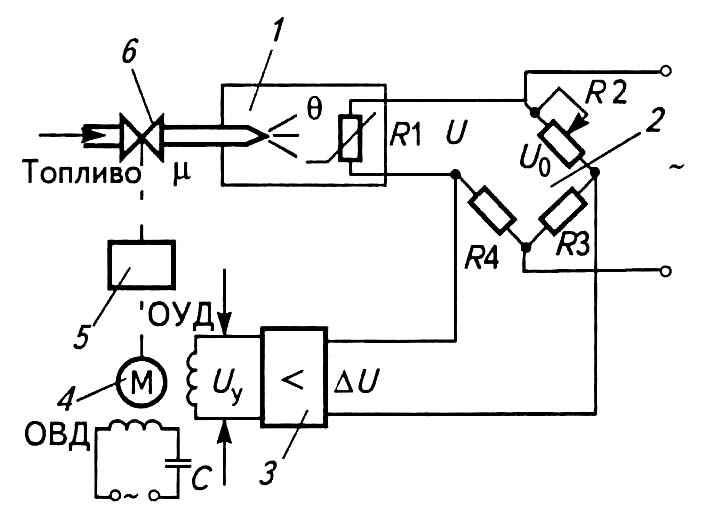 Рис. 1. Схема САР: 1 – печь; 2 – измерительная мостовая; 3 - дифференциальный магнитный усилитель; 4 — двухфазный электродвигатель; 5 — редуктор; 6 — клапан. Мостовая схема также сравнивает напряжение U, пропорциональное температуре в печи θ, с задающим напряжением U0, т. е. она помимо функций задающего органа (ЗО) выполняет функции сравнивающего органа (элемента). Напряжение разбаланса мостовой схемы ΔU(сигнала рассогласования) усиливается усилителем, выходное напряжение которого управляет исполнительным двигателем. Последний через редуктор перемещает клапан, т. е. изменяет регулирующее воздействие μ, на входе объекта регулирования. Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями: редуктором и клапаном, где Т0, Т1, Т2 - постоянные времени, с; θ - значение температуры в печи, °С; k0, k1, k2, k3, k4 - коэффициенты передачи; μ - линейное перемещение клапана, см; f - возмущающее воздействие на объекте регулирования; U - падение напряжения на терморезисторе, В; U0 - падение напряжения на задающем резисторе R2, В; ΔU - сигнал разбаланса мостовой схемы (сигнал рассогласования), В; Uy - напряжение навыходе усилителя, В. Значения параметров САР по вариантам указаны в табл. 1.. Выходное напряжение магнитного усилителя ограничено уровнем 200 В. Заданное значение температуры в печи 950 ºС. Таблица 1
2. СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА Схема САР, приведенная на рис. 2, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока, который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта - угловая скорость двигателя ω, регулирующее воздействие - напряжение UГ, подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования - момент сопротивления МС, создаваемый рабочим механизмом. Угловая скорость двигателя ω контролируется тахогенератором, сигнал которого Uтг, пропорциональный скорости, сравнивается с задающим сигналом U3. Сигнал рассогласования ΔU= U3 - Uтг усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента). Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями: где Тд, Ту, Тг - постоянные времени, с; kд, kм, kтг, kу, kг - коэффициенты передачи соответствующих элементов систем. Значения параметров объекта регулирования и элементов системы для различных вариантов указаны в табл. 2. Выходное напряжение магнитного усилителя ограничено уровнем 110 В. Значение угловой скорости ω = 40 рад/с. 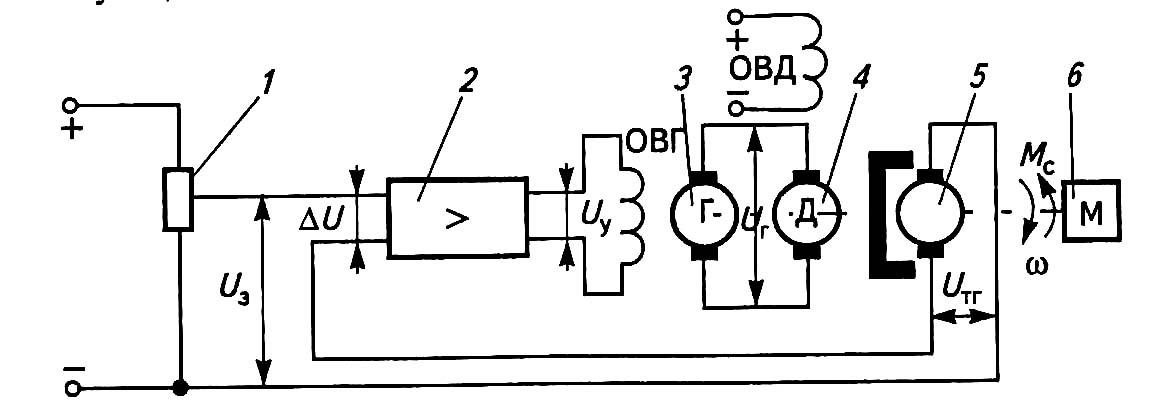 Рис. 2. Схема САР угловой скорости электродвигателя: 1 - задающий потенциометр; 2 - магнитный усилитель; 3 - генератор; 4 - двигатель; 5 - тахогенератор; 6 - рабочий механизм. Таблица 2
|