5. СИСТЕМА АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ
ГИДРОТУРБИНЫ
На электрических станциях при производстве электроэнергии предъявляют определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 6 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной - угловая скорость ω. Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т, е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением - возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения Xзаслонки. Следовательно, перемещение заслонки X можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования ΔUчерез усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
Динамические свойства элементов САР описываются следующей системой уравнений:
 - гидротурбина; - гидротурбина;
 - тахогенератор; - тахогенератор;
 - сравнивающий орган; - сравнивающий орган;
 - электронный усилитель; - электронный усилитель;
 - электродвигатель - электродвигатель
совместно с редуктором и заслонкой.
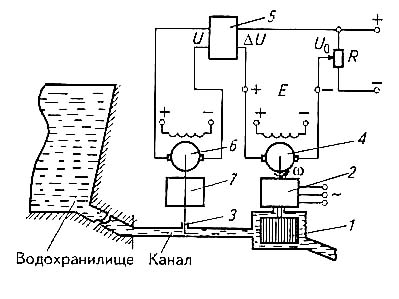
Рис. 5. Схема САР угловой скорости рабочего колеса
гидротурбины
Таблица 5
Вариант
|
Т0
|
k0
|
k1
|
kт
|
ky
|
Р
|
Тм
|
Тя
|
kэ
|
ν
|
σ
|
с
|
|
|
|
|
кВт
|
с
|
с
|
|
%
|
%
|
1
|
0,1
|
8
|
0,01
|
1,0
|
80
|
-100
|
0,02
|
0,005
|
0,02
|
1,0
|
5
|
2
|
0,15
|
7
|
0,015
|
1,0
|
100
|
80
|
0,019
|
0,004
|
0,02
|
1,5
|
10
|
3
|
0,11
|
6
|
0,016
|
1,0
|
90
|
-70
|
0,018
|
0,003
|
0,02
|
1,0
|
15
|
4
|
0,12
|
5
|
0,01
|
1,0
|
85
|
90
|
0,017
|
0,002
|
0,02
|
1,5
|
20
|
5
|
0,15
|
9
|
0,01
|
1,0
|
100
|
-95
|
0,016
|
0,002
|
0,02
|
0,75
|
25
|
6
|
0,2
|
4
|
0,011
|
1,0
|
110
|
85
|
0,015
|
0,002
|
0,02
|
0,5
|
30
|
7
|
0,1
|
7
|
0,015
|
1,0
|
120
|
-75
|
0,014
|
0,002
|
0,02
|
0,25
|
25
|
8
|
0,14
|
6
|
0,018
|
1,0
|
85
|
60
|
0,02
|
0,005
|
0,02
|
1,5
|
20
|
9
|
0,16
|
5
|
0,01
|
1,0
|
90
|
-100
|
0,018
|
0,003
|
0,02
|
1,75
|
15
|
10
|
0,18
|
8
|
0,01
|
1,0
|
100
|
95
|
0,016
|
0,002
|
0,02
|
1,5
|
10
|
Физический смысл переменных, входящих в уравнения, отражен в описании схемы САР. Параметры Т0, ТМ, ТД, и k0, k1, kт, ky, kэ - соответственно постоянные времени и передаточные коэффициенты. Их размерности и значения по вариантам приведены в табл. 5. Выходной сигнал электронного усилителя ограничен уровнем 110 В. Заданное значение скорости ω = 30 рад/с.
СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ
Курсовая работа предполагает последовательное решение следующих основных задач:
Построение структурной схемы нескорректированной системы и определение передаточных функций ее звеньев.
Построение желаемой логарифмической амплитудно-частотной характеристики.
Определение желаемых передаточных функций разомкнутой и замкнутой системы.
Синтез последовательного корректирующего устройства (регулятора).
Реализация корректирующего устройства в виде аналогового и цифрового регуляторов.
Построение и описание функциональной схемы скорректированной системы (с приведением параметров САУ и ее показателей качества).
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления – Изд. 4-е, перераб. и доп. – СПб, Изд-во "Профессия", 2003
Ерофеев А.А. Теория автоматического управления: Учебник для втузов. – 2-е изд., перераб. и доп. – СПб.: Политехника, 2003. – 302 с.: ил.
Синтез следящей системы автоматического управления: Метод. указания к курсовой работе. Сост. В.И. Будин, О.Б. Сигова, – Самара, СамГТУ, 2003. – 20 с.
Медведев В.С., Потемкин В.Т. Control System Toolbox. MATLAB 5 для студентов. – М.: ДИАЛОГ – МИФИ, 1999. – 287 с.
Лазарев Ю.Ф. MatLab 5. x. – К.: Издательская группа BHV, 2000. – 384 с.
Дьяконов В.П. Simulink 4. Специальный справочник. – СПб: Питер, 2002. – 528 с.: ил.
СОДЕРЖАНИЕ
Введение…………………………………………………..
|
3
|
Техническое задание на проектирование……………….
|
4
|
Варианты заданий
|
|
1. Система автоматического регулирования температуры в печи………………………………..........................
|
4
|
2. Система автоматического регулирования угловой скорости электродвигателя постоянного тока………….
|
7
|
3. Система автоматического регулирования температуры теплоносителя зерносушилки……………………..
|
9
|
4. Система автоматического регулирования давления в ресивере……………………………………………………
|
11
|
5. Система автоматического регулирования угловой скорости гидротурбины…………………………………..
|
14
|
Содержание работы……………………………
|
16
|
Рекомендуемая литература……………………………....
|
17
|
|
 Скачать 0.51 Mb.
Скачать 0.51 Mb.