теория машин и механизмов. Образец пояснилки ТММ. Титульный лист в конце записки Исходные данные
 Скачать 214.07 Kb. Скачать 214.07 Kb.
|

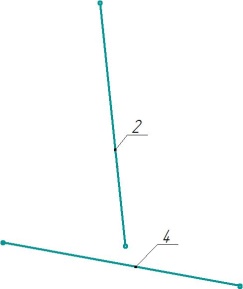
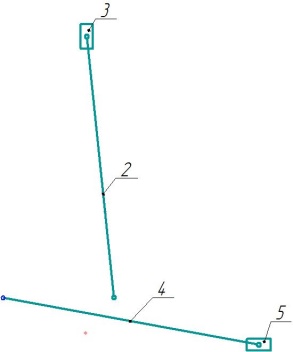
(титульный лист в конце записки)Исходные данныеОА= 0,09 м АВ=AC = 0,36 m2=m4= 3,5 кг 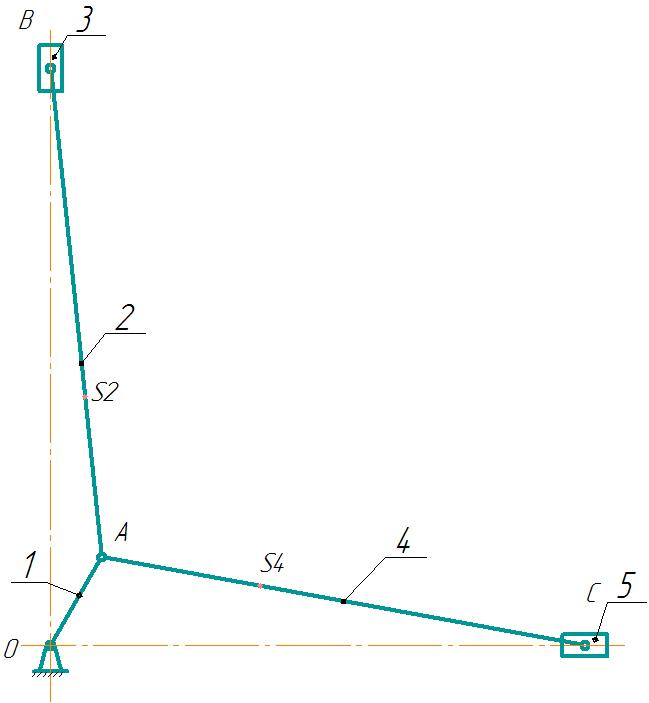 m5=m3= 4 кг ω1 = 100 с-1 Pmax = 550 н I =  Структурный анализ механизма.(плохо выполнен-переделать! Ошибки!)
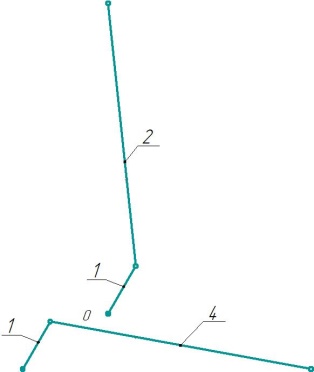
По формуле П.Л. Чебышева (для плоского механизма) определим число степеней свободы механизма:W = 3n - 2p5 - p4 = 3 * 5 - 2 * 7 - 0 = 1 где n = 5 - число подвижных звеньев p5 = 7 число кинематических пар V класса p4 = 0 - число кинематических пар IV класса О 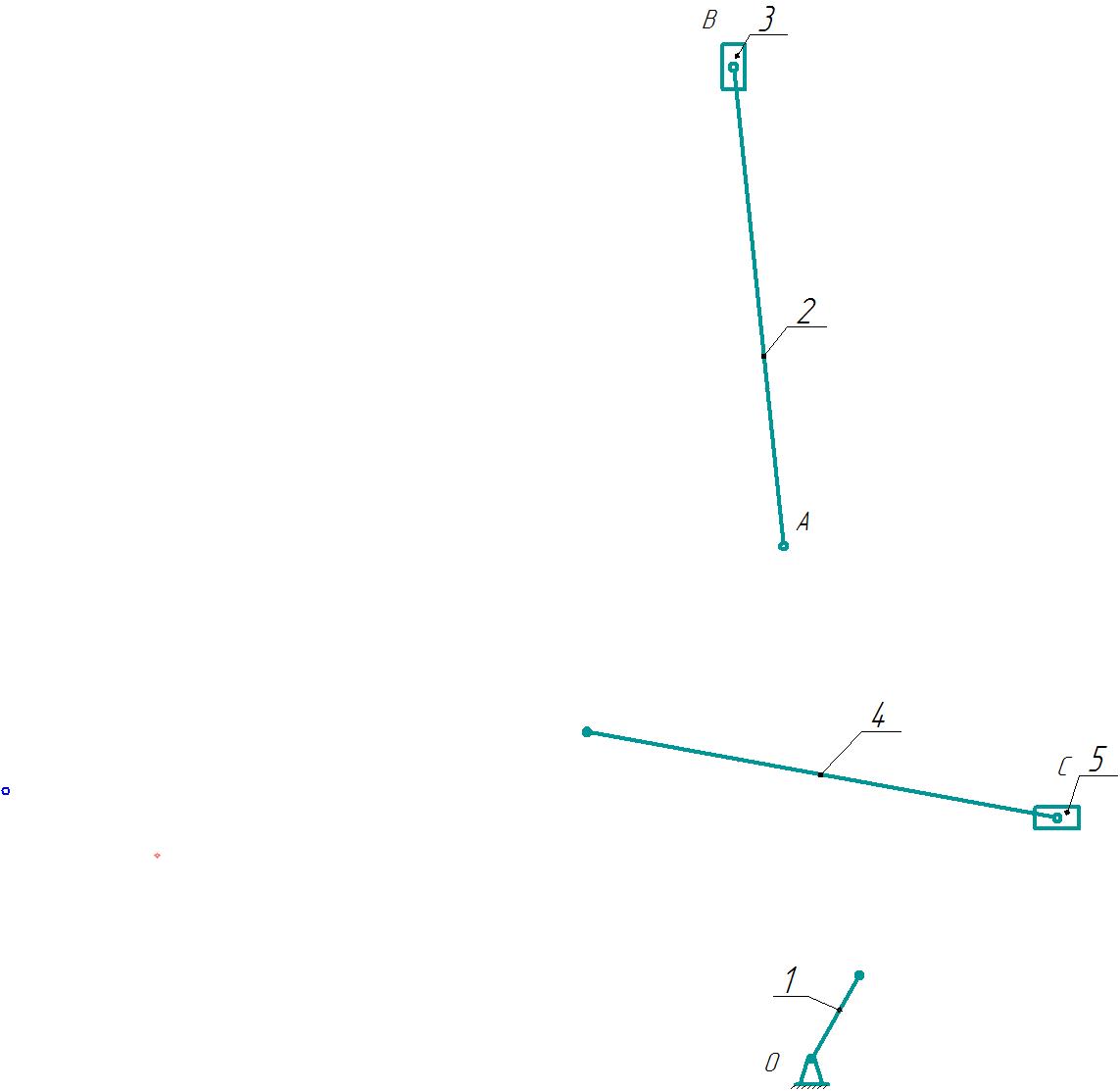 пределим класс механизма. Для этого разделим механизм на группы Ассура, начиная с последнего звена: пределим класс механизма. Для этого разделим механизм на группы Ассура, начиная с последнего звена:n = 2; p5 = 3 W = 3 * 2 - 2 * 3 = 0 Шатун 2 и ползун 3 образуют группу АссураII класса. 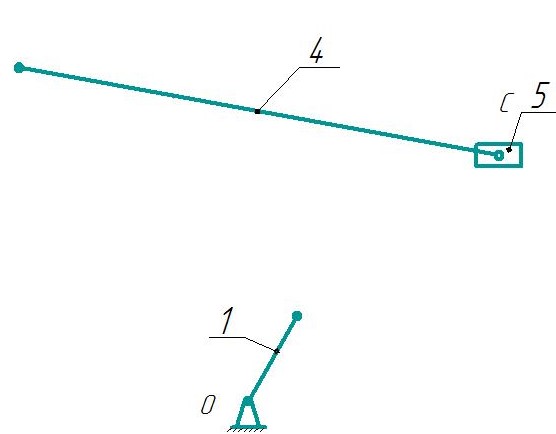 n = 2; p5 =3 W = 3 * 2 - 2 * 3 = 0 Шатун 4 и ползун 5 образую группу АссураII класса. n = 1; p5 = 1W = 3 * 1 - 2 * 1 = 1 Кривошип 1 и стойка 0 образуют группу АссураI класса. В механизм входят 2 группы АссураII класса и 1 группа АссураI класса, поэтому механизм имеет одну степень свободы и является механизмом II класса по классификации Ассура. Кинематический анализ механизма методом диаграмм.Построим диаграмму перемещений ползуна В. Диаграмму аналогов скоростей, получим графическим дифференцированием диаграммы перемещений. Графически дифференцируя диаграмму аналогов скоростей, получим диаграмму аналогов ускорений. Определим масштабные коэффициенты. Зададим масштабный коэффициент длин для построения плана перемещений:  И масштабный коэффициент для угла поворота:  Рассчитаем масштабный коэффициент для планов аналогов скоростей и ускорений:   Определим масштабные коэффициенты действительной скорости и ускорения:   Тогда перемещения, действительные скорости и ускорения будут равны:   
Кинематический анализ методом планов скоростей. Так как А - точка кривошипа, то двигается по окружности и ее скорость всегда направлена по касательной к траектории, то есть перпендикулярно радиусу в сторону вращения кривошипа. Величина скорости будет находиться по формуле:  Так как  , то и , то и  . Эту скорость мы возьмём за основу в построении планов скоростей. . Эту скорость мы возьмём за основу в построении планов скоростей.Определим масштабный коэффициент плана скоростей:  Для определения скорости точки B рассмотрим её движение относительно А:  Где   , , . При этом VB направлена вдоль направляющей, а VBA - перпендикулярно кривошипу АВ. Для определения скорости точки C нужно, как и в случае со скоростью точки В, рассмотреть её движение вокруг точки A, следуя описанному выше алгоритму. Для нахождения скорости точки центров масс шатунов S2 и S4 нужно разделить вектор VBA пополам (в нашем случае центр тяжести находится ровно посередине шатуна, поэтому мы и делим вектор пополам, при другом расположении центра масс точка будет в другом месте) и провести в эту точку вектор, который и будет являться искомой скоростью. . При этом VB направлена вдоль направляющей, а VBA - перпендикулярно кривошипу АВ. Для определения скорости точки C нужно, как и в случае со скоростью точки В, рассмотреть её движение вокруг точки A, следуя описанному выше алгоритму. Для нахождения скорости точки центров масс шатунов S2 и S4 нужно разделить вектор VBA пополам (в нашем случае центр тяжести находится ровно посередине шатуна, поэтому мы и делим вектор пополам, при другом расположении центра масс точка будет в другом месте) и провести в эту точку вектор, который и будет являться искомой скоростью.Для нахождения численных значений скорости пользуемся формулами:         Значения  , ,  , ,  , ,  , ,  и и  будем находить графическим способом. будем находить графическим способом.
Силовой анализ механизма. Построение индикаторной диаграммы. Вычисляем коэффициент силы сопротивления:  Находим силу сопротивления для ползунов в каждом положении:  
Построение плана ускорений. Расчёт производим для положения механизма №5. При вращении кривошипа с постоянной скоростью ускорение точки А состоит только из нормальной составляющей, которая равна:  Найдём масштабный коэффициент плана ускорений:  Ускорение точки В будет направлено по вертикали. Так же оно будет определяться по формуле:  Можно найти величину нормального ускорения точки В относительно точки А:  Направлено оно будет вдоль АВ к точке А. Тангенциальная составляющая этого ускорения будет перпендикулярна нормали, и построив тангенциальную составляющую до пересечения с наклонной из полюса ускорений, мы найдём полное ускорение точки В. По тому же алгоритму находим ускорение точки C . Как и в случае со скоростями, ускорение центра масс шатуна можно найти графически, разделив пополам вектор ускорения точки В относительно точки А, и провести туда вектор ускорения центра масс. Для нахождения численного значения ускорений воспользуемся масштабным коэффициентом:       Найдём угловое ускорение 2 и 4 звена:   Определяем моменты инерции шатунов:  Вычисляем все активные силы и силы инерции, приложенные к механизму, для группы Ассура АВ. Принимаем g = 10 м/с2.      Сила сопротивления P для 5 положения ползуна B имеет минимальное значение равное 0 н.           Найдём масштабный коэффициент сил для силового многоугольника:          Вычисляем все активные силы и силы инерции, приложенные к механизму, для группы АссураAC.      Сила сопротивления Pдля 5 положения ползуна C имеет максимальное значение, равное 77,3 н.          Найдём масштабный коэффициент сил для силового многоугольника:      3,43 мм 3,43 мм     Произведём силовой расчёт начального звена. Выделим начальное звено, не меняя размеров и положения. Приложим известные по величине и направлению реакции со стороны отброшенных второго и четвёртого звеньев.     Найденные реакции прикладываем к начальному звену и находим уравновешивающую силу:    Находим масштабный коэффициент и силы для плана сил начального звена:  Соответственно из плана находим реакцию R01:  Проверка рычагом Жуковского. Возьмём план скоростей в заданном положении механизма №5. Повернём на 90 градусов по направлению угловой скорости и увеличим в 4 раза. В соответствующих точках приложим все внешние силы, кроме реакций. При этом момент инерции представим в виде пары сил.   Составим уравнение моментов относительно полюса и найдём уравновешивающую силу:  Fy'=887,68Н Вычисляем погрешность:  Астраханский государственный технический университет Кафедра МИГ Пояснительная записка к РГР №1 и №2 по ТММ на тему: 1.«Кинематическое и структурное исследование механизмов компрессора». 2. «Силовое исследование механизмов компрессора». Тема 1, вариант 10 Выполнил: ст.гр. ДНРМб – 21 Бочкарев В.Н. Проверил: ст.пр. Корнеева Н.Н. Астрахань 2018  | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||