Учебник персонального тренера Под редакцией Калашникова Д. Г. Составители
 Скачать 1.25 Mb. Скачать 1.25 Mb.
|

|
Часть 2. Основы биомеханики Часть 2 Основы биомеханики Основные понятия механики материальной точки и твердого тела Механика - это раздел физики, в котором изучают механическое движение материальных тел. Механическое движение является простейшей формой движения материи, которое представляет собой изменение взаимного положения тел в пространстве и во времени. Механика включает в себя три основных раздела: статику, кинематику и динамику. В статике рассматривают условия равновесия материальных тел под действием приложенных сил. Кинематика изучает внешнюю картину движений. В динамике рассматривают причины возникновения и изменения движений. Остановимся на кратком изложении основных понятий кинематики и динамики. Основные понятия кинематики Для описания внешней картины движений используют линейные и угловые кинематические характеристики. Деление кинематических характеристик на линейные и угловые связано с тем, что любое сложное движение твердого тела можно представить как сумму двух простых движений - поступательного и вращательного. Поступательным называют такое движение тела, при котором все его точки двигаются одинаково, т. е. имеют одинаковые траектории и скорости. При вращательном движении различные точки тела двигаются по концентрическим окружностям, а точки, лежащие на оси вращения, остаются неподвижными. В отличие от твердого тела материальная точка не имеет ни вращательного, ни поступательного движения, она может двигаться либо по прямолинейной, либо по криволинейной траектории. Поскольку механическое движение - это изменение взаимного положения тел в пространстве и во времени, то для его количественного описания используют пространственные и временные системы отсчета. Существуют различные системы отсчета (естественная, прямоугольная декартова, полярная, цилиндрическая и др.). Напомним определения основных кинематических характеристик. Координата - это мера положения точки или тела в выбранной системе отсчета. Данная характеристика показывает лишь то, в каком месте находится точка или тело. Положение точки на плоскости определяется двумя координатами. При вращательном движении тела в одной плоскости его положение определяется одной угловой координатой. Перемещение — это изменение положения точки или тела в выбранной системе отсчета. Эта характеристика отражает кратчайшее расстояние, пройденное точкой из начального в конечное положение, или угол поворота тела при его вращении относительно какой-либо оси. Перемещение численно равно разности координат конечного и начального положения точки или тела. Наряду с перемещением используют еще одну характеристику -путь. В отличие от перемещения эта величина скалярная. Путь характеризует пройденное расстояние без учета направления движения точки вдоль траектории. Скорость - это изменения положения точки или тела с течением времени. Различают среднюю и мгновенную скорости (линейную и угловую). Средняя скорость - это отношение 19 Теория и методика фитнес-треиировки перемещения ко времени, за которое оно произошло. Мгновенная скорость - это первая производная координат по времени. Ускорение - это изменение скорости точки или тела с течением времени. Как и для скорости, различают среднее и мгновенное ускорение (линейное и угловое). Перемещение, скорость и ускорение - величины векторные, т. е. они характеризуются абсолютным значением (модулем), направлением и точкой приложения. Между угловыми и линейными кинематическими характеристиками движущего тела существуют вполне определенные соотношения. Так, например, линейная скорость любой точки вращающегося твердого тела равна произведению угловой скорости на расстояние этой точки до оси вращения. Основные понятия динамики В отличие от кинематики динамика изучает причины возникновения и изменения движений, т. е. силы и моменты сил, действие которых либо сохраняет тела в неподвижном положении, либо изменяет их движение. Кроме того, в динамике рассматривается связь между свойствами материальных тел и характеристиками их движения, выраженная в соответствующих законах динамики. Основными понятиями динамики являются сила, момент силы, масса, момент инерции тела и т. п. Сила - это мера механического взаимодействия тел в данный момент времени в поступательном движении. В механике, в отличие от физики и биомеханики, не рассматривают природу сил, действующих на то или иное тело. Мерой механического взаимодействия тел во вращательном движении является не сила, а ее момент. Момент сипы численно равен произведению силы на ее плечо. Плечо силы - это кратчайшее расстояние от оси вращения до линии, вдоль которой действует сила. Масса — это мера инертности тела в поступательном движении. Чем больше масса тела, тем труднее его заставить двигаться, а если оно двигалось, то его труднее остановить или изменить направление его движения. Мерой инертности тела во вращательном движении является момент инерции. Eго величина определяется произведением массы тела на радиус инерции в квадрате. Радиус инерции характеризует распределение масс в теле относительно оси вращения. Как и масса, момент инерции тела показывает, насколько трудно или легко изменить его движение, нотолько в данном случае речь идет о вращательном движении тела. В основе динамики лежат три основных закона. Первый закон — если на тело не действуют никакие силы, то оно будет сохранять покой или двигаться равномерно и прямолинейно. В этом законе подчеркивается, что покой и равномерное прямолинейное движение - не различные состояния тела, свойство тел сохранять эти состояния определяется массой и моментом инерции. Второй закон - сила, действующая на тело, равна произведению массы тела на его ускорение. Для вращательного движения в данной зависимости вместо силы нужно взять ее момент, вместо массы — момент инерции, а вместо линейного ускорения – угловое ускорение. Важно подчеркнуть, что второй закон динамики устанавливает связь между причиной изменения движения, свойством тела и его кинематикой. Третий закон - всякому действию есть равное противодействие. Не менее важными динамическими характеристиками являются: импульс силы и импульс тела, механическая работа, мощность, энергия (кинетическая и потенциальная) и т.п. Связи между некоторыми из них настолько значимы, что получили статус самостоятельных законов. Среди них можно отметить закон сохранения импульса и кинетического момента, закон сохранения энергии и другие. Более подробные сведения об этих характеристиках можно получить в соответствующей литературе. Однако для 20 Часть 2. Основы биомеханики знакомства с основами некоторых разделов биомеханики рассмотренных выше характеристик будет вполне достаточно. Введение в биомеханику и биомеханические особенности строения тела человека Биомеханика - это наука, которая изучает механические явления в живых системах. Живые системы и механические явления в них весьма многообразны. К живым системам относят: различные ткани тела человека (костная, мышечная, соединительная и др.), органы и системы (сердечно-сосудистая, дыхательная, скелетно-мышечная и др.), человек или группа людей и т. п. Механические явления также многообразны. К ним относятся: механические свойства тканей тела человека, механика движения крови по сосудам, механика родового акта и другие. Но чаще всего основным предметом исследования биомеханики является механическое движение животных, в том числе и человека. Биомеханика, как научная область знаний, развивается в разных направлениях. Ее знания и методы широко используются в робототехнике, при изучении двигательных действий в условиях производства, в медицине, в космонавтике и т. п. Физическая культура и спорт также нуждаются в знаниях биомеханики. Основными задачами спортивной биомеханики являются:
4. Биомеханическое обоснование конструкции тренажеров и требований по их использованию в тренировочном процессе. 5. Биомеханические аспекты и профилактика спортивного травматизма. 6. Изучение индивидуальных и групповых особенностей движений и двигательных возможностей человека. Соединение звеньев тела человека и степени свободы Пассивная часть двигательного аппарата человека включает в себя кости, суставы и связки, образующие скелет человека. В биомеханике его принято рассматривать как многозвенную систему, состоящую из подвижно соединенных твердых звеньев. Известно, что скелет человека состоит из более 200 костей. Для удобства его описания используют такие понятия, как кинематическая пара, кинематическая цепь и степени свободы. Кинематическая пара - это два звена, соединенные между собой подвижно. Примером кинематической пары является плечо и предплечье, соединенные локтевым суставом. Кинематическая цепь - это последовательное или разветвленное соединение кинематических пар. Различают замкнутые и незамкнутые кинематические цепи. Примером замкнутой цепи является последовательное соединение двух ребер, грудины и позвонка в грудной клетке. К незамкнутой кинематической цепи можно отнести безопорную ногу в фазе переноса при ходьбе. Степени свободы - это количество независимых угловых и линейных перемещений тела. Применительно к телу человека понятие «степени свободы» характеризует степень подвижности кинематических пар, цепей и всего тела человека. Поскольку в суставах возможны в основном вращательные движения, то степени свободы в них определяются независимыми угловыми перемещениями, количество которых зависит от формы и строения сустава. Так, например, в локтевом суставе имеется две степени свободы (сгибание-разгибание и пронация-супинация), а в тазобедренном суставе — три степени свободы 21 Теория и методика фитнес-тренировки (сгибание-разгибание, отведение-приведение и пронация-супинация). Чтобы определить число степеней свободы в кинематической цепи, нужно сложить степени свободы всех суставов этой цепи. В теле человека насчитывается 244 степени свободы, что свидетельствует о его колоссальной подвижности, а значит и необходимости управления движениями такой сложной системы. Биомеханика мышц Скелетные мышцы являются основными движителями нашего тела. Их количество превышает 600. С биомеханической точки зрения основными показателями их деятельности в организме человека являются сила тяги и скорость изменения длины. Следует подчеркнуть, что мышца может только тянуть, толкать она не может. Именно поэтому для управления движениями в суставах относительно той или иной степени свободы необходимы как минимум две мышцы-антагонисты. Реально их значительно больше, что создает значительные трудности в понимании того, как мозг распределяет степень участия мышц в суставных движениях. Это одна из нерешенных пока проблем организации движений человека, которая в биомеханике получила название проблема избыточности в управлении мышечной активностью. Эксперименты на изолированных мышцах животных и человека показали, что сила тяги мышцы складывается из двух составляющих. Одна из них, назовем ее активной составляющей, обусловлена сократительными возможностями мышечной ткани. Другая составляющая силы возникает при растягивании мышцы и обусловлена наличием в ней соединительной ткани, которая ведет себя подобно пружине и способна накапливать энергию упругой деформации при растягивании мышцы. Назовем ее пассивной составляющей силы тяги мышцы. Следует подчеркнуть, что активная сила тяги сопровождается затратами химической энергии, запасенной в мышцах, и, как следствие, приводит к утомлению. Пассивная составляющая силы тяги имеет сугубо механическую природу и не требует затрат химической энергии. Рассмотрим основные зависимости, раскрывающие сущность механики мышечного сокращения. На рис. 6 показаны зависимости силы тяги изолированной мышцы от ее длины. Видно, что с увеличением длины мышцы суммарная сила тяги (а) увеличивается, но при этом активная (с) и пассивная (Ь) составляющие силы изменяются по-разному. Сила упругой деформации (Ь) нелинейно возрастает с увеличением длины мышцы. Активная сила (с) сначала увеличивается, а затем уменьшается, т. е. максимум силы тяги наблюдается при некоторой оптимальной длине мышцы, которая получила название длина покоя. Отметим, что в зависимости от количества соединительной ткани в мышце характер кривых «сила- длина» и доля вклада активной и пассивной силы в общую силу тяги мышцы изменяются (рис. 6-1, II, и III). 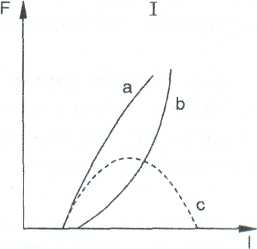 л.  ш Икроножная мышца Портняжная мышца Полусухожильная мышца Рис. 6. Зависимость силы тяги мышцы (F) от ее длины (I). Сплошная линия (а) - общая сила тяги; сплошная линия (Ь) - сила тяги мышцы при ее пассивном состоянии; пунктирная линия (с) - сила тяги сократительных элементов мышцы. 22 Часть 2. Основы биомеханики Другой классической зависимостью является зависимость силы тяги мышцы от скорости изменения ее длины. Прежде чем ее рассмотреть, напомним основные режимы мышечного сокращения. Изометрический - режим, при котором сокращение происходит при постоянной длине мышцы. Преодолевающий - режим сокращения, при котором длина мышцы уменьшается. Этот режим также называют концентрическим или миометрическим. Уступающий - режим сокращения, при котором длина мышцы увеличивается. Другие названия - эксцентрический или плиометрический. На рис. 7 приведен график зависимости силы тяги мышцы от скорости изменения ее длины при разных режимах мышечного сокращения. Видно, что наибольшую силу тяги мышца проявляет при уступающем режиме сокращения. 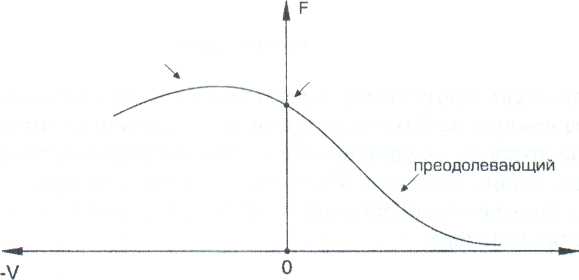 уступающий изометрический +V Рис.7 Зависимость силы тяги мышцы (F) от скорости изменения ее длины Причем с ростом скорости растягивания мышцы сила увеличивается, но до определенного предела. Следующим режимом сокращения, с точки зрения силовых возможностей мышцы, является изометрический режим. Наименьшую силу тяги мышца демонстрирует при преодолевающем режиме сокращения. При этом чем с большей скоростью укорачивается мышца, тем меньшую силу тяги она проявляет. Взаимодействие человека с окружающей средой, осуществляемое за счет активности соответствующих мышц, происходит через звенья тела, которые в биомеханике рассматриваются как система костных рычагов. Напомним, что рычаг - это твердое тело, которое может вращаться под действием приложенных сил и которое служит для передачи силы и работы на расстояние. Выделяют два вида рычагов - одноплечие (рычаг второго рода) и двуплечие (рычаг первого рода). Равновесие или движение рычага определяется соотношением моментов сил, приложенных к нему. Рассмотрим действие мышц на костный рычаг в кинематической паре. В качестве примера приведем действие мышц-сгибателей предплечья при задании удержать груз в руке массой 10 кг. Чтобы упростить задачу, заменим все мышцы-сгибатели локтевого сустава одной эквивалентной мышцей (рис. 8). Такой прием часто используют в биомеханике. Предположим также, что плечо неподвижно, а предплечье и кисть невесомы. Таким образом, в данной системе действуют две силы - сила тяги мышцы (F) и сила тяжести груза (Р). Каждая из этих сил создает момент относительно локтевого сустава. Задание будет выполнено, если момент мышечной тяги будет равен моменту силы тяжести груза. Из равенства моментов сил можно определить силу мышечной тяги, которая в данном примере в десять раз превышает силу тяжести груза. В реальных условиях момент силы мышечной тяги делится между теми мышцами, которые участвуют в его создании. 23 Теория и методика фитнес-тренировки =100°(N) M(Fm) = M(P) FM-dM= P'dp  P-dp 100*0,3 f P=100N Рис.8 Условие равновесия рычага и расчёт силы тяги мышцы Проигрыш в силе тяги мышц, характерный для большинства суставов тела человека, отражает весьма важную особенность строения скелетно-мышечной системы. Она состоит в том, что мышцы крепятся очень близко к осям вращения в суставах и как следствие этого имеют малые величины плеч сил. Внешние нагрузки действуют на больших плечах сил. Такое строение приводит к проигрышу в мышечных силах, но к выигрышу в размахе и скорости движения в суставе. 100-j 80 I 60 H о I 40 о 20 Н 30 60 90 120 угол (град.) 15 Рис. 9 Зависимость момента силы от угла в локтевом суставе при сгибании предплечья в локтевом суставе На рис. 9 приведена зависимость силы сгибателей предплечья от угла в локтевом суставе. Видно, что наиболее выгодное положение соответствует углу, близкому к 90°. При увеличении или уменьшении угла момент силы уменьшается. Основными причинами изменения силовых возможностей человека при изменении угла в суставе являются: 1) изменение плеча силы тяги мышцы; 2) изменение длины мышцы; 3) изменение угла, под которым мышца тянет за кость (рис. 10). Силу тяги мышцы (F) можно разложить на две составляющие. Одна из них направлена перпендикулярно предплечью (R) и создает вращательный момент в суставе. Другая составляющая силы (Р) действует вдоль предплечья и укрепляет сустав, вращательного момента она не создает, поскольку проходит через ось вращения в локтевом суставе. 24 |