00. Методичка_сборка. Указатель шага винта ушв1К 77
 Скачать 4.74 Mb. Скачать 4.74 Mb.
|

|
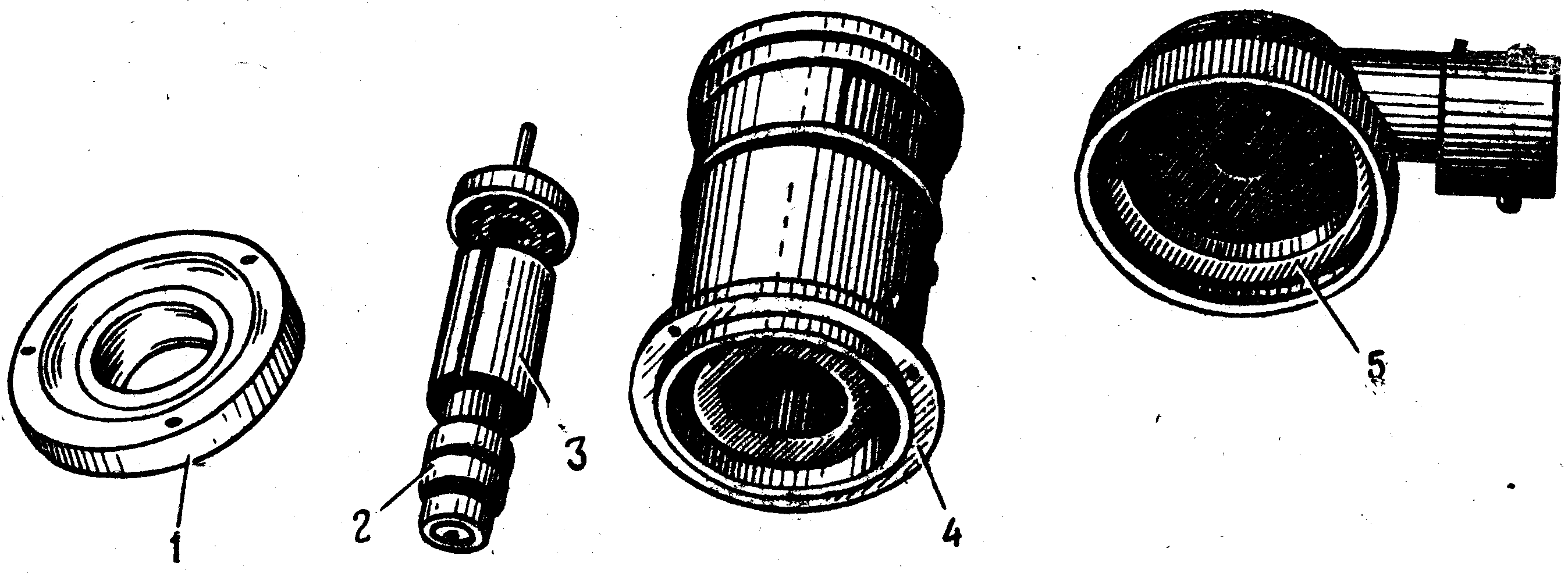 |
| Рис. 2.11. Конструкция сельсина: 1 - крышка передняя; 2 - токосъемные кольца; 3 - ротор; 4 - статор; 5 - крышка задняя |
В авиационном оборудовании наибольшее распространение получили контактные сельсины типа КС (контактный сельсин) и СМ (сельсин малогабаритный).
В конструктивном отношении сельсин состоит из двух основных частей:
а) статор, подобный статору обычной асинхронной машины. В пазах статора размещена распределенная трехфазная, точнее, трехкатушечная обмотка. Следует подчеркнуть, что фазы ЭДС (токов) в указанных обмотках статора при обычных схемах включения сельсинов одинаковы в отличие от асинхронной или синхронной машины. Поэтому название «трехфазная обмотка статора» для сельсинов применяется условно и часто заменяется названием трехкатушечная обмотка. Все три катушки обмотки статора имеют одинаковые параметры (число витков, сопротивления) и соединяются по схеме «звезда». Оси катушек смещены в пространстве на 120°. Статор сельсина выполняется с неявно выраженными полюсами;
б) ротор, на котором размещена однофазная обмотка. Напряжение переменного тока к данной обмотке подводится (или снимается) через посеребренные щетки и кольца. Таким образом, у каждого контактного сельсина (датчика и приемника) на роторе имеются два кольца. Обычно ротор имеет явно выраженные полюса. В некоторых случаях применяется так называемая обращенная конструкция сельсинов, при которой однофазная обмотка размещается на статоре. Статор при этом имеет явно выраженные полюса. Трехфазная обмотка в этом случае размещается в пазах ротора. Такая конструкция не является характерной для сельсинов, применяемых в авиационном оборудовании, где обычно используются сельсины, конструкция одного из которых рассмотрена выше и показана на рис. 2.11.
Конструкция сельсинов остается практически одной и той же независимо от того, для какой цели он используется - для измерения угла рассогласования в следящей системе или для индикаторной дистанционной передачи.
Исключения в этом отношении составляют так называемые дифференциальные сельсины, которые имеют и статор, и ротор с неявно выраженными полюсами. При этом в пазах статора и ротора размещены трехфазные обмотки (катушки), соединенные по схеме «звезда». В остальном конструкция дифференциального сельсина не отличается от конструкции обычного сельсина, описанной выше. Дифференциальные сельсины, как будет показано далее, используются для ввода в следящую систему некоторой постоянной угловой величины.
В следящих системах сельсины всегда используются попарно. При этом один из них является сельсин-датчиком (СД),второй - сельсин-приемником (СП):Такая пара сельсинов используется как в индикаторной дистанционной передаче, так и в следящей (силовой) системе (передаче).
В соответствии с этим различают два возможных режима работы сельсинов:
а) индикаторный режим работы (соответствует использованию сельсинов в индикаторной дистанционной передаче);
б) трансформаторный режим работы (соответствует использованию сельсинов в следящей дистанционной передаче).
Как уже отмечалось, наиболее характерной для сельсинных дистанционных передач переменного тока является следящая (силовая) дистанционная передача, поэтому более детально рассмотрим именно силовую дистанционную передачу (трансформаторный режим работы сельсинов). Рассмотрение индикаторной сельсинной передачи (индикаторный режим работы сельсинов) проведем лишь в общих чертах.
Сельсинная индикаторная дистанционная передача
Блок-схема сельсинной индикаторной дистанционной передачи аналогична блок-схеме потенциометрической индикаторной передаче, показанной на рис, 2.1.
Так же как в потенциометрической индикаторной передаче, индикаторный режим работы сельсинов позволяет осуществить синхронный поворот (вращение) двух механически не связанных осей (валов). В этом режиме работы ось ротора сельсин-датчика (СД)жестко связана с одной из осей системы, например с командной осью, положение которой необходимо передавать на указательный прибор (индикатор).
Ротор сельсин-приемника связан с индикаторной стрелкой, или указательным индексом.
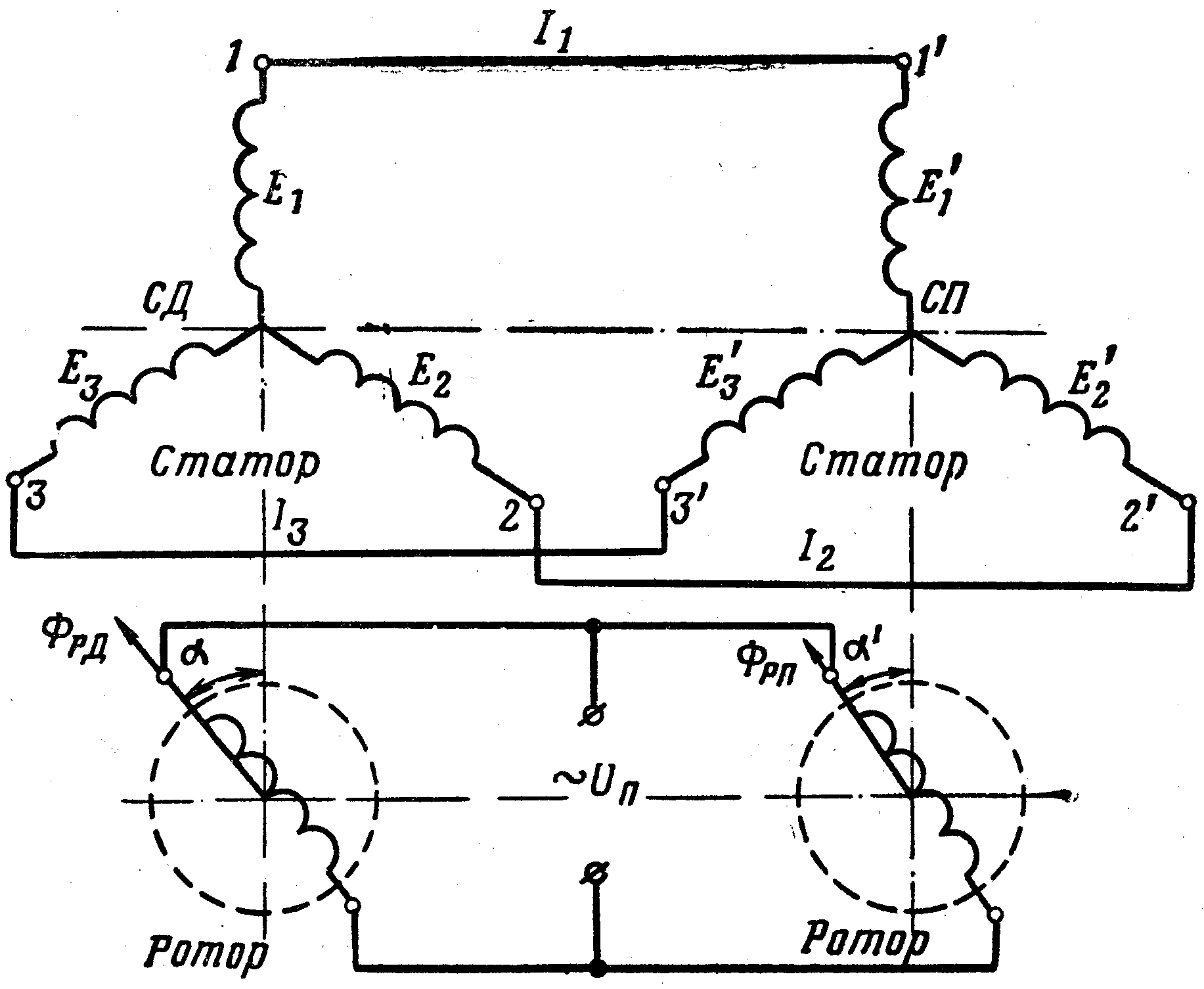 |
| Рис. 2.12. Электрическая схема соединения сельсинов, работающих в индикаторном режиме |
Электрическая схема соединения сельсинов, работающих в индикаторном режиме, показана на рис. 2.12, из которого видно, что в данном случае напряжение питания Uпподводится одновременно к обмоткам роторов общих сельсинов, т. е. к роторам СЦ и СП. Однотипные фазы статорных обмоток СД и СП соединены между собой трехпроводной линией связи.
Пусть ось, с которой связан ротор сельсин-датчика (СД),оказалась повернутой на некоторый угол α, а ротор сельсин-приемника и связанная с ним стрелка указательного прибора остались в исходном (нулевом) положении (α' = 0). Тогда роторы СД и СП будут занимать разное положение в пространстве, т. е. оси рассматриваемых роторов окажутся взаимно сдвинутыми на угол Θ = α - α'= α (Θ - угол рассогласования). Оси переменных магнитных потоков ФРД и ФРП, созданных соответственно обмотками роторов сельсин-датчика (СД)и сельсин-приемника (СП),за счет переменного напряжения питания Uп окажутся также взаимно сдвинутыми на угол Θ = α. Поэтому ЭДС в одноименных фазах обмоток статоров СД и СП,наводимые за счет потоков соответственно ФРД ФРП, будут неодинаковы:
Уравнительные токи I1, I2, I3, протекая по обмоткам статора сельсин-приемника (СП),взаимодействуют с потоком ротора ФРП, что обусловливает появление вращающего момента М.
Аналогичная картина имеет место в сельсин-датчике. Направление вращающего момента М определяется по закону Ленца, т. е. момент М всегда имеет такое направление, при котором он стремится уничтожить рассогласование Θ осей ротора СД и СП как причину появления момента М. При отсутствии рассогласования осей (Θ = 0) вращающий момент М также отсутствует (М = 0),так как оси потоков ФРД и ФРП совпадают. Соответственно ЭДС будут
Из рассмотрения принципа действия сельсинов, работающих в индикаторном режиме, видно, что в данном случае входной величиной для сельсинной схемы является угол рассогласования Θ роторов СД и СП. Выходной величиной является вращающий момент М,под действием которого происходит синхронный поворот (вращение) роторов СД и СП до их согласованного положения.
Зависимость момента М от величины рассогласования роторов Θ имеет примерно синусоидальный характер:
Для сельсинов, используемых в авиационном оборудовании, величина к составляет примерно 0,40,6 гссм/град, или (0,40,6) 10-4 Нм/град.
В авиационных следящих системах более, часто используется трансформаторный режим работы сельсинов.
Сельсинная следящая дистанционная передача
(сельсины в трансформаторном режиме)
Следящая дистанционная передача переменного тока с использованием сельсинов работает так же, как круговая следящая потенциометрическая передача постоянного тока, рассмотренная ранее. Поэтому передачи имеют одинаковую блок-схему (рис. 2.7).
Различие между указанными передачами заключается в основном в конструкции и принципе действия сельсин-датчиков (СД)и сельсин-приемников (СП),применяемых в передаче переменного тока, по сравнению с потенциометрическими датчиками и приемниками, применяемыми в передаче постоянного тока.
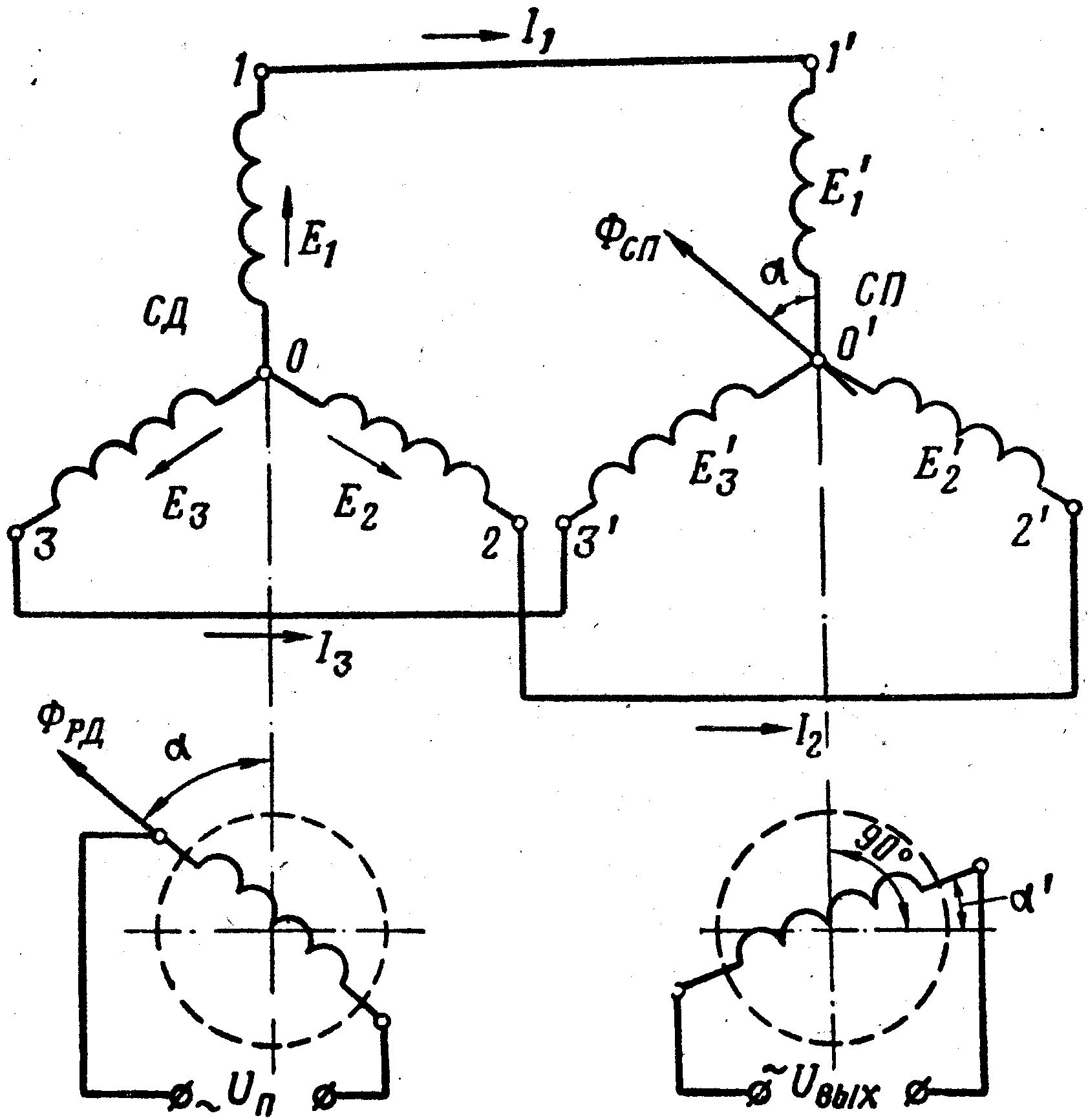 |
| Рис. 2.13. Электрическая схема соединения сельсинов, работающих в трансформаторном режиме |
Рассмотрим более детально работу сельсинной схемы (датчика и приемника) передачи.
Как уже отмечалось, сельсины в следящей дистанционной передаче работают в трансформаторном режиме.
Электрическая схема соединения сельсинов для данного режима показана на рис. 2.13.
Трансформаторный режим работы сельсинов позволяет получить электрический сигнал (в виде напряжения Uвых), пропорциональный углу рассогласования двух механически не связанных между собой осей (валов). Для этого ротор сельсин-датчика (СД)жестко соединен с командной осью следящей системы, а ротор сельсин-приемника (СП) - сисполнительной осью.
Входной величиной для сельсинной схемы является угол рассогласования в между угловыми положениями командной и исполнительной осей следящей системы, или, иначе, между осями роторов СД и СП.
Питание датчика (Uп)осуществляется переменным током, который подводится к обмотке ротора СД. Из схемы (рис. 2.13) видно, что в рассматриваемом режиме однотипные фазы статорных обмоток СД и СП соединены между собой трехпроводной линией. Электрическая энергия источника питания трансформируется (передается) от обмотки ротора СД к обмотке статора СД и далее через обмотку статора СП в роторную обмотку СП. Поэтому данный режим работы сельсинов и принято называть трансформаторным.
Выходной величиной сельсинной схемы является напряжение Uвых, снимаемое с роторной обмотки СП. Величина Uвых, как будет показано ниже, пропорциональна углу рассогласования в роторов СД и СП,Таким образом, трансформаторный режим работы сельсинов позволяет измерять угол рассогласования в следящей системе.
Работа сельсинов протекает в такой последовательности. Под действием напряжения питания Uп,приложенного к обмотке ротора СД, образуется изменяющийся во времени поток ФРД ротора датчика. Обмотка ротора СД является обмоткой возбуждения сельсина. Вектор потока ФРД всегда совпадает с осью ротора СД. Пусть ось потока ФРД направлена под углом α к оси первой фазы обмотки статора СД. За счет потока ФРД в катушках статорных обмоток СД индуктируются переменные ЭДС: Е1, Е2, Е3,совпадающие по фазе и частоте. Так как фазы этих ЭДС всегда одинаковы, то обмотки статора сельсина, как уже отмечалось, можно лишь условно называть трехфазными. В действительности это три катушки, образующие однофазную (а не трехфазную) систему.
Действующие значения переменных ЭДС Е1, Е2, Е3равны
Здесь
Под действием ЭДС Е1, Е2, Е3по статорным обмоткам СД и СП и соединительным проводам протекают токи соответственно I1, I2, I3. Для того чтобы определить величину этих токов, соединим мысленно средние точки О и О' статорных обмоток СД и СП дополнительным проводом. При наличии такого провода отдельные фазы (катушки) статорных обмоток становятся обособленными и тогда выражения для токов I1, I2, I3можно записать так:
Здесь Z - сумма полных сопротивлений двух статорных катушек: катушки СД и соединенной с ней катушки СП. Для сельсинов, имеющих ротор с неявно выраженными полюсами или с широкой полюсной дугой, сопротивления катушек обмотки статора можно считать одинаковыми Z1=Z2=Z3=Zи не зависящими от угла поворота ротора сельсина. Ток в четвертом проводе равен сумме токов:
Тогда с учетом выражений (5.1) и (5.2) получим
Ток I0 всегда равен нулю (I0 = 0), так как величина, заключенная в квадратные скобки в выражении (2.4), тождественно равна нулю. Следовательно, четвертый провод, соединяющий точки О и О' сельсинов, не нужен. Это означает, что выражения (2.2) для токов I1, I2 и I3справедливы и для реальной схемы соединения сельсинов (рис. 2.13) без дополнительного, четвертого провода. Таким образом, токи I1, I2, I3в отдельных катушках статоров сельсинов согласно выражениям (2.2) пропорциональны соответствующим ЭДС Е1, Е2, Е3, причем коэффициент пропорциональности для всех трех токов один и тот же, равный -
Выражения для потоков отдельных катушек можно записать в следующем виде:
Коэффициент а имеет вид
где
Результирующий поток ФСП статора сельсин-приемника, созданный тремя катушками, всегда направлен относительно оси первой катушки под углом α, т. е. так же, как и поток ФРД ротора СД относительно оси первой катушки статора СД. Другими словами, поток ФСП статора сельсин-приемника всегда имеет одинаковое направление с исходным потоком сельсинной схемы, т. е. потоком ФРД ротора сельсин-датчика.
В этом нетрудно убедиться, если определить продольную ФСПx и поперечную ФСПy составляющие результирующего потока ФСП по оси первой катушки статора.
Учитывая, что результирующий поток ФСП создается тремя катушками, выражения для указанных составляющих ФСПx и ФСПy этого потока можно записать как алгебраическую сумму соответствующих составляющих потоков от каждой катушки:
или с учетом выражений (2.5):
Из полученных выражений видно, что результирующий поток ФСП статора СП действительно направлен под углом α к оси первой катушки и численно равен
Таким образом, вектор потока статора сельсин-приемника ФСП всегда совпадает по направлению с осью ротора сельсин-датчика при любом значении угла α. К этому выводу можно прийти и другим путем. Действительно, поток ФСП статора СП индуктирует в каждой катушке статора СП ЭДС соответственно Е'1, Е'2, Е'3.
Если пренебречь падением напряжения от токов I1, I2,I3 на сопротивлениях обмоток статоров СД и СП и соединительных проводов, то ЭДС Е'1, Е'2, Е'3обмоток статора СП должны уравновешивать соответствующие ЭДС Е1, Е2, Е3обмоток статора СД,т. е. будут выполняться равенства:
Но ЭДС Е1, Е2, Е3индуктируются за счет потока ФРД ротора сельсин-датчика, а ЭДС Е'1, Е'2, Е'3- соответственно за счет результирующего потока ФОП статора сельсин-приемника. Из условия равенства этих ЭДС следует, что потоки ФРД и ФОП должны иметь одинаковое направление.
Итак, при трансформаторном режиме работы сельсинов вектор потока ФСП сельсин-приемника синхронно следует за осью ротора сельсин-датчика. Эта важная особенность работы сельсинов в трансформаторном режиме и позволяет получить на выходе схемы сигнал Uвых,пропорциональный углу рассогласования осей следящей системы. Действительно, в обмотке ротора сельсин-приемника индуктируется за счет потока ФСП ЭДС (напряжение), величина которой пропорциональна данному потоку ФСП.
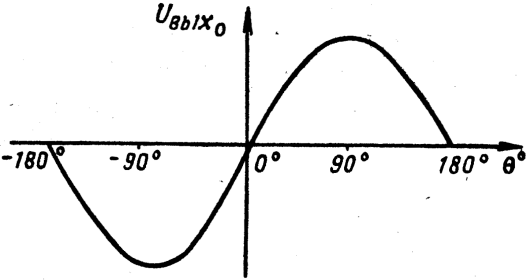 |
| Рис. 2.14. Статическая характеристика сельсинов, работающих в трансформаторном режиме |
Причем если за исходное положение сельсинов брать такое положение, при котором оси роторов СД и СП совпадают, то при отсутствии рассогласования в следящей системе
(Θ = 0) напряжение на выходе Uвыхбудет иметь максимальное значение. Следовательно, согласованному положению осей следящей системы в этом случае будет соответствовать максимальное значение выходного сигнала Uвых.макс, что неудобно. Поэтому за согласованное положение сельсинов берут такое, при котором оси роторов СД и СП сдвинуты на угол, равный
С учетом этого обстоятельства выражение для Uвых0при холостом ходе сельсинного датчика можно записать так:
где
Таким образом, статическая характеристика рассматриваемой сельсинной схемы Uвых = f (Θ) при холостом ходе (нагрузка в цепи обмотки ротора СП отсутствует) имеет вид синусоиды (рис. 2.14).
При малых углах рассогласования эту зависимость можно приближенно считать прямолинейной:
где угол Θ выражен в радианах.
Изменение знака угла рассогласования в приводит к изменению фазы выходного сигнала Uвых0 на 180°. Чувствительность (коэффициент усиления) сельсинной схемы определяется выражением
Для датчиков, применяемых в авиационном оборудовании, величина kсоставляет примерно 1 В/град.
Необходимо отметить, что полученные выражения (2.7) и (2.8) являются приближенными, поскольку при выводе их предполагалось, что поле в воздушном зазоре между статором и ротором сельсина распределено по закону синуса, магнитопровод не насыщен, параметры катушек обмоток статоров СД и СП одинаковы. В существующих конструкциях сельсинов эти условия практически выполняются.
При нагружении роторной обмотки сельсин-приемника на сопротивление нагрузки ZH напряжение на выходе датчика Uвыхнесколько уменьшается по сравнению с его значением при холостом ходе датчика Uвых0. Кроме того, может нарушаться синусоидальный характер зависимости Uвых = f (Θ) (особенно если нагрузка велика) за счет обратного действия (реакции якоря) потока ФРП обмотки ротора СП по отношению потока ФСП статора СП.
В следящей системе сигнал с сельсинного датчика подается на вход усилителя. Если при этом входное сопротивление усилителя велико, как, например, в усилителе, выполненном на электронных лампах, то режим работы сельсинов близок к холостому ходу и учитывать влияние нагрузки ZH на величину выходного напряжения Uвых нет необходимости.
Дифференциальный сельсин (ДС)
Конструктивно ДС,как уже отмечалось, подобен сельсин-датчику и сельсин-приемнику. Основное отличие ДС при этом определяется тем, что у него обе обмотки (статорная и роторная) трехфазные. Подвод тока к обмоткам ротора осуществляется через три кольца и три щетки. Ротор ДС неявно полюсный. Дифференциальный сельсин включается между сельсин-датчиком и сельсин-приемником. Его статорная (или роторная) обмотка соединена трехпроводной линией со статорной обмоткой СД, а роторная (или статорная) обмотка таким же способом соединена со статорной обмоткой СП (рис. 2.15).
Статор ДС обычно закреплен неподвижно, а ротор соединяется с осью устройства, с помощью которого задают некоторое исходное (начальное) значение угла рассогласования δ. Дифференциальный сельсин представляет собой устройство, с помощью которого данное начальное значение угла рассогласования δвводится в следящую систему. Если оси одноименных обмоток статора и ротора ДС совпадают, т. е. угол поворота ДС равен нулю, то ДС никаких изменений в сельсинную схему не вносит (кроме некоторого уменьшения выходного напряжения).
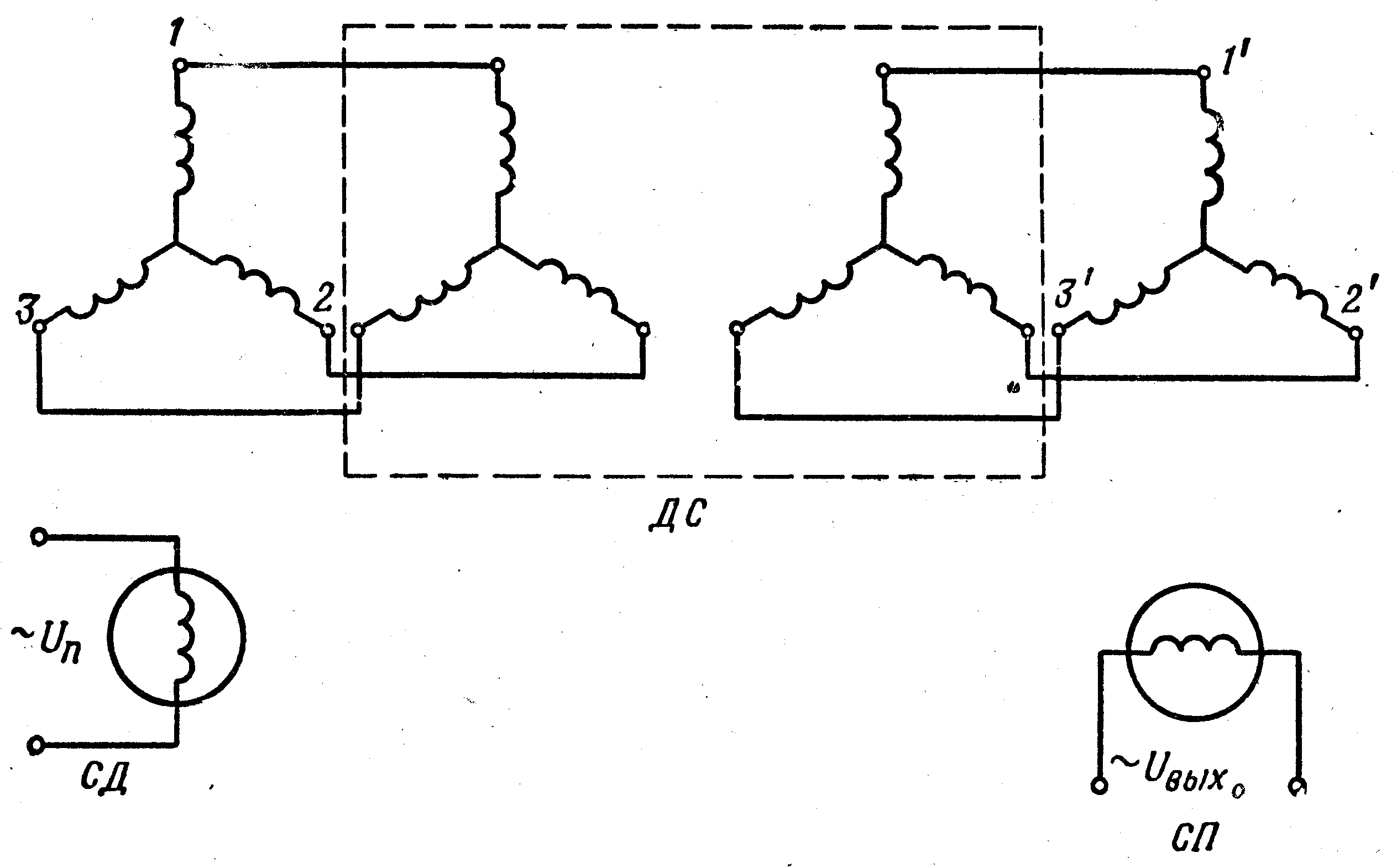 |
| Рис. 2.15. Схема включения дифференциального сельсина |
Действительно, поле статора ДС, как и в ранее рассмотренном случае без ДС (рис. 2.13), имеет такое же относительное направление, что и поле ротора сельсин-датчика.
В свою очередь, поле статора СП имеет такое же направление, что и поле статора ДС. Следовательно, в данном случае поле статора СП имеет одинаковое направление с полем ротора СД,т. е. так же, как это имело место в сельсинной схеме (рис. 2.13) без ДС.
Если угол поворота ДС не равен нулю, то картина меняется. Действительно, поворот ротора ДС на угол δэквивалентен повороту ротора СД на угол δ.
При наличии дифференциального сельсина выходное напряжение Uвых0 сельсинной схемы (рис. 2.15) В общем случае определяется суммой (алгебраической) углов поворота роторов сельсин-датчика и дифференциального сельсина относительно ротора сельсин-приемника:
Рассмотрим некоторые параметры, характеризующие сельсины в трансформаторном режиме.
По динамическим свойствам сельсины в трансформаторном режиме аналогичны индуктивному датчику.
Действительно, частота изменения входного сигнала - угла рассогласования в осей следящей системы существенно меньше частоты f питающего напряжения. Поэтому сельсинный датчик, так же как и индуктивный, можно считать безынерционным звеном (Uвых = kΘ).
 |
| Рис. 2.16. Принципиальная схема бесконтактного сельсина |
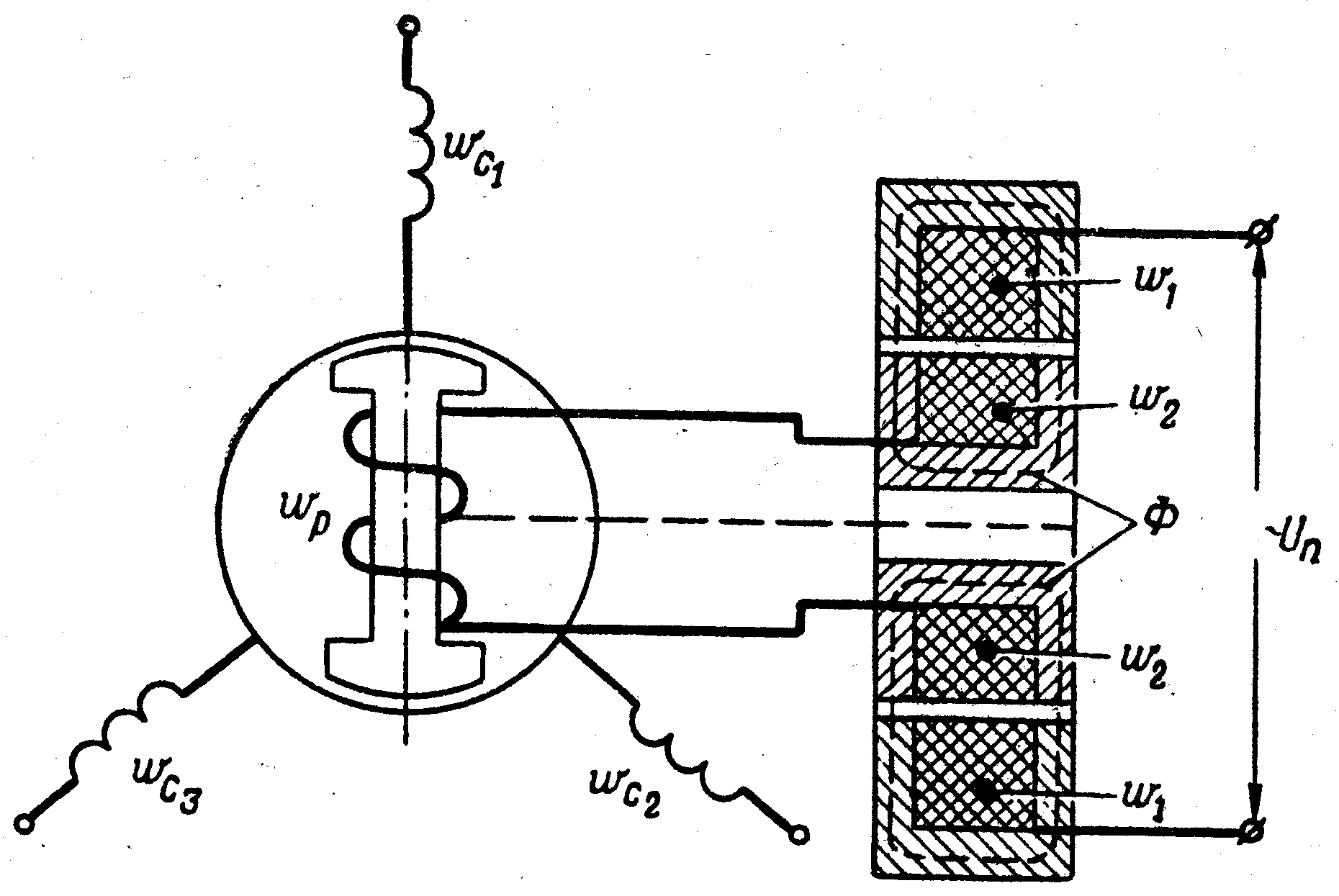
У контактных сельсинов, рассмотренных выше, основной причиной шумов (помех) является контактное устройство - щетка-кольцо. Диапазон частот этих шумов очень широк, так же как и у потенциометрических датчиков. Для устранения указанных шумов и повышения надежности работы сельсинов последнее время начинают применяться бесконтактные сельсины. Принципиальная схема одного из таких сельсинов показана на рис. 2.16, из которой видно, что контактное устройство щетка-кольцо обычного сельсина в данном случае заменено трансформатором специальной конструкции.
Первичная обмотка трансформатора с числом витков w1расположена на статоре сельсина и, следовательно, при работе сельсинов остается неподвижной. Вторичная обмотка с числом витков w2размещена на роторе сельсина и поворачивается вместе с ротором вокруг оси ротора. Напряжение питания сельсина Uпподводится к первичной обмотке (w1). Поток Ф, созданный этой обмоткой, замыкается так, как показано на рис. 2.16. При этом величина ЭДС, наводимая во вторичной обмотке (w2)трансформатора за счет потока Ф, не зависит от угла поворота ротора сельсина. Эта ЭДС используется для питания обмотки wр ротора сельсина. В остальном конструкция бесконтактного и контактного сельсинов подобны.
При одинаковых размерах и мощности контактных и бесконтактных сельсинов величина выходного напряжения Uвых в бесконтактных сельсинах обычно меньше, чем в контактных, поэтому коэффициент усиления (чувствительность)
При изготовлении сельсинов возможна некоторая несимметрия, т. е. неточности в расположении осей катушек обмоток статора, небольшие искажения формы полюсных башмаков и другие факторы, которые обусловливают инструментальную погрешность сельсинного датчика, индивидуальную для каждой пары сельсинов.
Величину этой погрешности измеряют опытным путем, для чего, задавая дискретные значения угла поворота α ротора СД,находят каждый раз соответствующие значения угла поворота ротора СП,при котором напряжение на выходе датчика Uвых0= 0. Рассогласования =α - α ', имеющие место при этом, и составляют погрешность сельсинов. Величина погрешности определяется через каждые 30° при повороте роторов сельсинов вправо и влево в пределах 180°.
Среднее значение инструментальной погрешности будет
где
Исходя из величины средней инструментальной погрешности сельсины делятся на три класса точности, для которых средняя инструментальная погрешность составляет: для первого класса 0,5°, для второго - 0,5-1,0° и для третьего - 1,0-1,5°.
Повышение точности измерения угла рассогласования
Чувствительность kсельсинных устройств, применяемых в авиационном оборудовании, как уже отмечалось, составляет примерно 1 В/град. При такой чувствительности сельсинов, выполняющих роль измерительного органа в следящей системе, осуществить высокую степень точности системы не представляется возможным. Действительно, в ряде случаев допустимая величина угла рассогласования в следящей системе меньше собственной ошибки сельсинов.
В этом случае выходное напряжение Uвых0 сельсин-приемника, соответствующее допустимым в следящей системе углам рассогласования, настолько мало, что не вызывает реакции со стороны исполнительного устройства системы. Поэтому возникает необходимость каким-то образом повысить величину напряжения Uвых0, соответствующего малым углам рассогласования в системы, т. е. повысить чувствительность сельсинной схемы и тем самым повысить томность работы следящей системы в целом.
На практике эта задача решается путем применения повышающем передачи (редуктора) между командной осью и ротором СД и соответственно между исполнительной осью и ротором СП. В этом случае следящая система имеет две сельсинные схемы, образующие два канала измерения рассогласования в системе: грубый и точный каналы, каждый из которых включает в себя сельсин-датчик и сельсин-приемник (рис. 2.17).
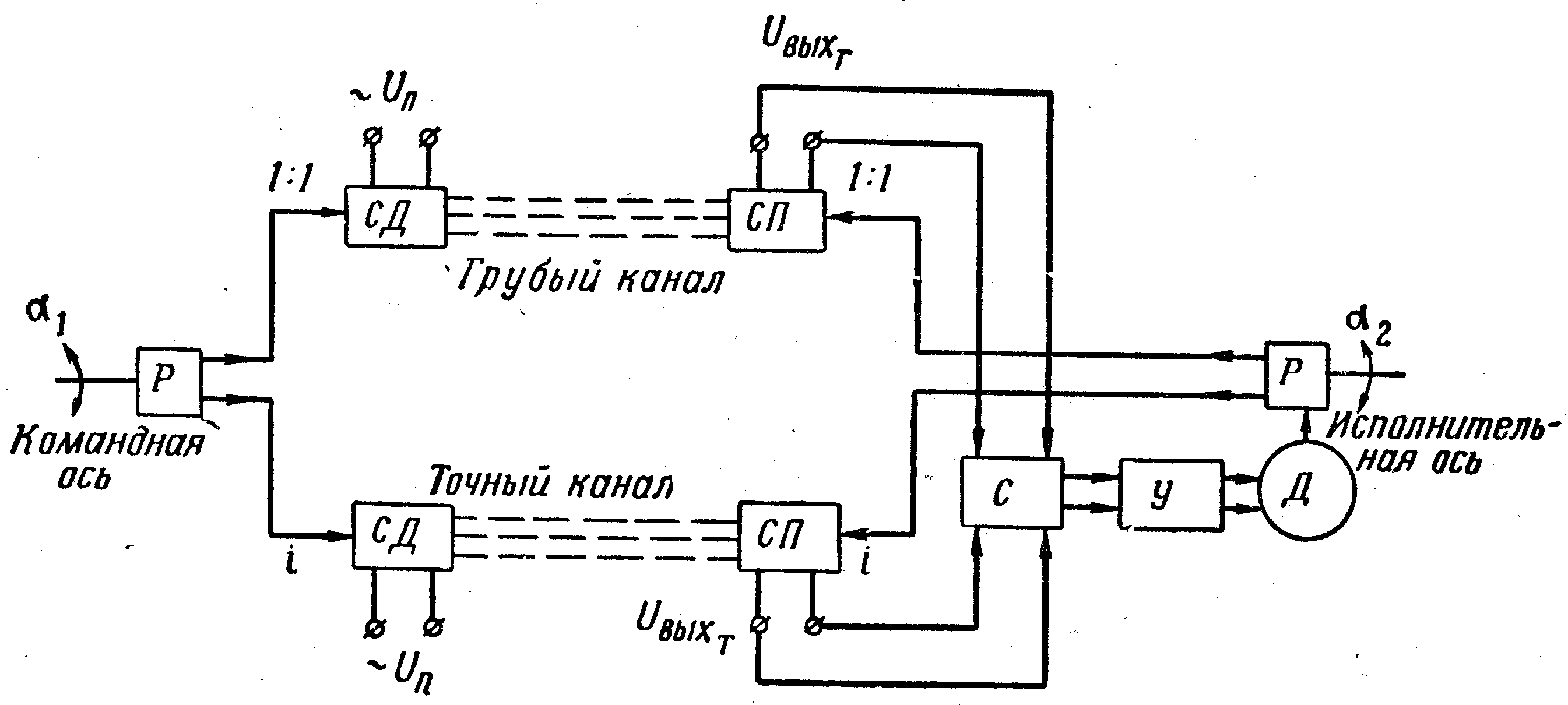 |
| Рис. 2.17. Принципиальная схема грубого и точного каналов следящей системы |
На рис. 2.17 обозначены:
Р - редуктор;
С - синхронизатор, переключающий следящую систему с точного канала на грубый и наоборот;
У - усилитель;
Д - исполнительный электродвигатель.
Роторы сельсин-датчика и сельсин-приемника грубого канала связаны соответственно с командной и исполнительной осями следящей системы без повышающих редукторов, т. е. с передаточным отношением 1:1.
Роторы сельсин-датчика и сельсин-приемника точного канала связаны с теми же осями через повышающий редуктор с передаточным отношением i.В этом случае при повороте одной из осей следящей системы роторы сельсинов точного канала вращаются быстрее, чем роторы сельсинов грубого канала. Процесс измерения рассогласования и работа системы при этом осуществляются следующим образом.
Пусть командная ось следящей системы повернулась на угол α1. Тогда ротор СД грубого канала повернется также на угол iα1, а ротор СД точного канала - на угол α1. Если управление исполнительной осью системы вести по грубому каналу, то в результате отработки рассогласования ротор сельсин-приёмника и исполнительная ось системы повернутся на одинаковый угол α2, равный α2= α1±, где - собственная погрешность сельсинов грубого канала.
При этом остаточное рассогласование Θ0, или погрешность, в следящей системе будет равно Θ0= α1- α2 = ±.
Если управление исполнительной осью вести по точному каналу, то после отработки системой рассогласования ротор СП повернется на угол α2 = iα1±, после чего напряжение Uвых.т на выходе датчика станет равно нулю. Исполнительная ось системы при этом повернется на угол
Таким образом, погрешность в следящей системе при управлении по точному каналу уменьшается в iраз.
Последнее становится понятным, если учесть, что введение точного канала с повышающей передачей между сельсином и осью системы соответствует как бы увеличению крутизны характеристики Uвых0 = f(Θ) сельсинной схемы. Действительно, для грубого канала сельсинов одному обороту командной оси системы соответствует один период изменения выходного напряжения Uвых0. Для точного канала одному обороту оси системы соответствует iпериодов изменения Uвых0. Поэтому для получения максимального значения выходного напряжения Uвых. макс в грубом канале сельсинов необходимо задать рассогласование Θ'Г = 90° (рис. 2.14), а в точном канале -
Следовательно, точный канал сельсинов позволяет более точно осуществлять измерение рассогласования в системе, причем тем точнее, чем больше величина i.
Однако чрезмерное увеличение передаточного отношения редуктора i нельзя считать целесообразным.
В некоторых авиационных следящих системах величина i = 31. В этом случае управление следящей системой при малых углах рассогласования (<3°) осуществляется с помощью точного канала сельсинов, при больших углах рассогласования - с помощью грубого канала. Переключение системы с одного канала па другой осуществляется с помощью специальных переключающих устройств - синхронизаторов.
Следящие системы, имеющие грубый и точный каналы измерения 0, называются двухскоростными или двухканальными.
Чрезмерное увеличение передаточного отношения i редуктора в точном канале сельсинов вызывает затруднения в работе син
 хронизаторов, так как время, в течение которого должно быть сделано переключение с точного канала на грубый, с увеличением iуменьшается. Кроме того, при чрезмерном увеличении i начинает сильно сказываться влияние люфтов в передаче.
хронизаторов, так как время, в течение которого должно быть сделано переключение с точного канала на грубый, с увеличением iуменьшается. Кроме того, при чрезмерном увеличении i начинает сильно сказываться влияние люфтов в передаче.2.4 МАГНЕСИННАЯ ДИСТАНЦИОННАЯ ПЕРЕДАЧА ПЕРЕМЕННОГО ТОКА
В авиационных приборах наряду с сельсинными передачами находят применение также магнесинные индикаторные передачи. Основной недостаток обычных сельсинов связан, как уже отмечалось, с наличием у них контактного устройства.
Скользящие контакты ограничивают применение сельсинных схем в ряде устройств по соображениям безопасности. Кроме того, момент трения, основная часть которого создается за счет трения щеток о кольца, в обычных сельсинах оказывается значительным (десятые доли граммосантиметра). Последнее исключает возможность вращения таких сельсинов в индикаторных дистанционных передачах с помощью чувствительных элементов, таких, например, как магнитоэлектрические приборы, показания которых необходимо передать на расстояние.
От указанных недостатков свободны бесконтактные дистанционные передачи, созданные на основе бесконтактных сельсинов или на основе бесконтактного устройства типа магнесин.
Принцип действия бесконтактного сельсина (рис. 2.16) ничем практически не отличается, как уже отмечалось, от принципа действия обычного сельсина (рис. 2.11). Поэтому и принцип работы дистанционной передачи в целом с бесконтактными сельсинами практически ничем не отличается от работы передачи с контактными сельсинами, рассмотренной выше.
Конструкция магнесина чрезвычайно проста. Отсюда чрезвычайная простота конструкции всей дистанционной передачи с магнесинами. По этой причине указанная передача получила значительно большее распространение по сравнению с дистанционной передачей с бесконтактными сельсинами.
Принципиальная электрическая схема бесконтактной дистанционной передачи с магнесинами показана на рис. 2.18.
В каждой дистанционной передаче используются два однотипных магнесина с одинаковыми параметрами. Один из них является магнесин-датчиком (МД),второй - магнесин-приемником (МП).
Статор магнесина представляет собой кольцевой сердечник, набранный из листового пермаллоя, на котором равномерно намотана обмотка. В трех точках обмотки, смещенных друг относительно друга на угол 120°, имеются отпайки 1, 2,3, в результате чего вся обмотка статора разбивается на три части (катушки), как в трехфазной системе.
В качестве ротора магнесина используется постоянный магнит цилиндрической формы, укрепленный на опорах.
Ось ротора магнесин-датчика (МД)механически связывают с осью того устройства, угловое положение которого необходимо передать на расстояние с помощью рассматриваемой передачи.
Ось ротора магнесин-приемника (МП)связана с указательной стрелкой (индексом).
Одноименные отпайки 1-1', 2-2', 3-3' обмоток статоров датчика и приемника соединены между собой трехпроводной линией связи. К обмоткам статоров магнесинов подводится напряжение переменного тока Uпчастотой 400 Гц так, как показано на рис. 2.18.
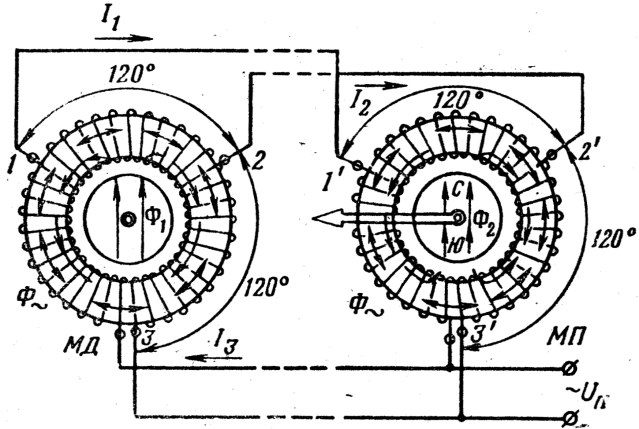 |
| Рис. 2.18. Бесконтактная дистанционная передача с магнесинами |
Рассмотрим работу магнесинной передачи. При подключении напряжения питания Uпк обмоткам статоров в каждом из магнесинов возникает переменный магнитный поток Ф, который замыкается по кольцевому сердечнику.
Поток Фр ротора, созданный постоянным магнитом, также проходит по кольцевому сердечнику. Величина потока Фр определяется на основании закона Ома для магнитной цепи следующим выражением:
где N - намагничивающая сила постоянного тока;
Сопротивление кольцевого сердечника статора на пути потока ротора Фр зависит от степени насыщения материала (пермаллоя) сердечника.
Так как насыщения пермаллоя происходит при сравнительно слабых магнитных полях, кольцевой статор магнесина в нормальных условиях работы оказывается насыщен одну часть периода за счет переменного потока Ф своей обмотки и не насыщен другую часть периода (когда поток близок к нулю).
Следовательно, пермаллоевый сердечник статора будет представлять собой переменное магнитное сопротивление Rдля потока Фр постоянного магнита ротора. Это означает, что магнитный поток Фр постоянного магнита будет переменным по величине.
Таким образом, общее напряжение (ЭДС) в катушках статора каждый раз обусловлено двумя причинами: напряжением питания Uпи дополнительной ЭДС ед, наводимой в обмотках за счет пульсирующего потока Фр ротора.
Так как обмотки МД и МП одинаковы, напряжение питания Uп приложенное к обмоткам, распределяется между катушками также одинаково.
Поэтому, если не учитывать дополнительную ЭДС ед, потенциалы одноименных отпаек 1-1', 2-2', 3-3' в МД и МП всегда одинаковы. Величина дополнительных ЭДС едв катушках обмоток датчика и приемника будет зависеть как от величины потока Фр, так и от взаимного расположения постоянного магнита и этих обмоток.
Пусть роторы МД и МП имеют одинаковые угловые положения. Тогда, очевидно, дополнительные ЭДС едв соответствующих катушках датчика и приемника будут также одинаковы. Отсюда потенциалы одноименных точек (отпаек) 1-1', 2-2', 3-3' датчика и приемника также одинаковы и уравнительные токи между ними не протекают.
Если же угловые положения роторов МД и МП неодинаковы, дополнительные ЭДС едв одноименных катушках датчика и приемника имеют разные величины, в результате возникают уравнительные токи I1, I2,I3. Эти токи, протекая по катушкам статоров, взаимодействуют с потоком ротора Фр, что приводит к появлению вращающего (синхронизирующего) момента, который по закону Ленца всегда направлен в сторону уничтожения рассогласования роторов.
Поэтому ротор магнесин-приемника (так же, как и в сельсинной передаче) будет следовать за всеми изменениями углового положения ротора магнесин-датчика. Точность отработки углов рассогласования в дистанционных передачах с магнесинами обычно составляет 1-2°.