Курсовая работа по ГЭУ. Курсовая работа Выбор параметров и основных элементов гребной эл. Выбор параметров и основных элементов гребной электрической установки
 Скачать 311.54 Kb. Скачать 311.54 Kb.
|

|
Министерство транспорта Российской Федерации Федеральное агентство морского и речного транспорта ФГБОУ ВО "Государственный морской университет имени адмирала Ф.Ф.Ушакова" Заочный факультет КУРСОВАЯ работа по дисциплине "Автоматизированные гребные электрические установки" на тему: «Выбор параметров и основных элементов гребной электрической установки» Выполнил: Проверил: профессор Нещеретный Н. С. Новороссийск 2021 Содержание 1. Исходные данные 3 2. Расчёт буксировочной мощности 3 3. Расчет гребного винта. Выбор числа и мощности гребных электродвигателей, главных генераторов и первичных двигателей 4 3.1. Выбор ГЭД 4 3.2. Расчет гребного винта 6 3.3. Определение оптимальной частоты вращения ГЭД 7 3.4. Проверка правильности выбора ГЭД 8 3.5. Выбор главных генераторов 10 4. Разработка схемы главной цепи ГЭУ 11 5. Построение желаемых статических характеристик [1-10] 12 5.1. Построение рабочих характеристик винта 12 5.2. Построение желаемой механической характеристики ГЭД 12 5.3. Построение желаемой внешней характеристики главного генератора 15 6. Разработка функциональной схемы 17 7. Выбор возбудителей, постов управления и избирательных переключателей 20 7.1. Выбор тиристорных преобразователей для питания обмоток возбуждения 20 7.2. Выбор постов управления 22 7.3. Выбор избирательных переключателей [3-4] 24 8. Разработка схемы защиты, блокировки и сигнализации 26 8.1. Виды защиты 26 8.2. Блокировки 26 8.3. Виды сигнализаций, применяемых на судах с электродвижением: 27 Заключение 30 Литература 31 1. Исходные данныеВариант №8 тип судна – Спасательное судно; длина между перпендикулярами по главной ватерлинии: L = 70 м; ширина судна В = 18 м; Высота Т = 5.5м; водоизмещение D = 2700 т; скорость судна Vs = 18уз; принцип регулирования - по схеме постоянства мощности (ПМ). Число гребных винтов: 2 2. Расчёт буксировочной мощностиЭ. Э. Папмель предложил следующую формулу для определения буксировочной мощности NR, (в лошадиных силах), судна нормальных обводов при заданной скорости судна VS, уз. [15]:  = = где  , м3 - объёмное водоизмещение; , м3 - объёмное водоизмещение;Vs - скорость хода в узлах; Х – множитель, зависящий от числа валов. Для одновинтового судна Х=1, для двухвинтового Х=1,05;  – поправочный множитель, зависящий от длины судна. – поправочный множитель, зависящий от длины судна.  - характеристика остроты корпуса; - характеристика остроты корпуса;  - коэффициент общей полноты; - коэффициент общей полноты; Т, м – среднее значение осадки судна; с = f ( V /) = 91 – эмпирический расчётный коэффициент по диаграмме Папмеля ;  – приведенная скорость, уз. – приведенная скорость, уз. 3. Расчет гребного винта. Выбор числа и мощности гребных электродвигателей, главных генераторов и первичных двигателей3.1. Выбор ГЭДВыбор типа гребных электродвигателей в ГЭУ постоянного тока сводится к определению типа корпуса двигателя, числа якорей, характера возбуждения и средств улучшения коммутации. Тип корпуса определяют принятой системой вентиляции и числом якорей электродвигателя. Для принудительной вентиляции по замкнутому циклу выбирают закрытые двигатели, а при разомкнутом цикле охлаждения двигатели открытого исполнения. Одноякорные двигатели обладают меньшими: массой, объемом и длиной, а также позволяют упростить распределительное устройство. Двухъякорные двигатели имеют меньший момент инерции и выбираются в тех случаях, когда одноякорный двигатель по конструктивным соображениям не удается разместить в корме судна или когда необходимо обеспечить повышенную живучесть судна, пониженное напряжение на коллекторе или экономичные ходы при мощности на гребных валах, не превышающей 25% мощности полного хода. Возбуждение двигателей обычно независимое. Чтобы улучшить условия коммутации, выбирают двигатели с дополнительными полюсами и компенсационной обмоткой. Число гребных двигателей обычно равно числу гребных валов. [3-4, 11-12]. Количество ГЭД выбирается из условия, что суммарная мощность всех ГЭД должна быть приблизительно вдвое больше буксировочной мощности: РГЭД = 2·0,736·NR,=2·0,736·4106 кВт. Если мощность ГЭД оказывается недостаточной для выполнения этого условия, то следует проектировать двухвальную установку. PГЭД = 7200 кВт; U = 1200 B; nном = 150-215 об/мин; ηГЭД = 93,8 %; mобщ = 103 т; Iа = 2x3200 A; p = 9; Iв = 110 A; ММ = 18 м2. Rа = 0,0051 Ом; Rд.п. = 0,0016 Ом; Rв = 1,88 Ом; Rк = 0,0032 Ом; N = 595; a = 1,25. После выбора ГЭД необходимо привести его основные параметры: номинальные значения мощности, напряжения, тока, частоты вращения, кпд, номинальные значения напряжения и тока возбуждения, сопротивления обмоток возбуждения и суммарное якорной цепи, которое определяется по формуле  Ом, Ом,где Ra – сопротивление обмотки якоря; Rд.п. – сопротивление обмотки дополнительных полюсов; Rк – сопротивление компенсационной обмотки, а также число пар полюсов, параллельных ветвей, количество витков на пару полюсов обмоток возбуждения и якоря, номинальное значение магнитного потока, момент инерции. 3.2. Расчет гребного винтаБуксировочное сопротивление R или равная ему полезная тяга Pе, кг: Ре = 75·NR/v=75·4106,18/7,21=42714 кг, где v = 0,515 ·13,8=7,21 м/с – скорость судна из условия, что 1 уз = 1 миля/ч= 1852 м/3600 с = 0,515, м/с. Коэффициент попутного потока w по эмпирическим формулам Тейлора: — для одновинтовых судов: w= 0,5  - 0,1=0,5·0,73-0,1=0,26 рад/с; - 0,1=0,5·0,73-0,1=0,26 рад/с;Коэффициент засасывания t по формулам Шенхерра: — для одновинтовых судов t= kw=(0,51,05)w=1,05·0,26=0,28 с; Полная сила упора Р, кг, создаваемая гребным винтом, равна: P = Pe/(1- t)=42714/(1-0,28)=59133,7 кг. Осевая скорость винта Vp, м/с, относительно обтекающей струи воды Vp = v·(1–w)=7,21·(1-0,26)=5,3 м/с. Диаметры гребных винтов из условий размещения в кормовом подзоре: — для одновинтовых судов D = (0,60,75) · Т = 0,7·7,6=5,32 м; 3.3. Определение оптимальной частоты вращения ГЭДОптимальная скорость вращения гребного винта выбирается в зависимости от конкретных обстоятельств из условий обеспечения: максимального КПД установки или минимального расхода топлива; минимальной массы установки; минимальных первоначальных затрат на оборудование ГЭУ; минимальных годовых эксплуатационных расходов. На судах гражданского флота наиболее важным показателем работы ГЭУ часто бывает экономия топлива при полном ходе судна. Поэтому для таких судов оптимальную скорость ГЭД рационально определять из условий получения максимального КПД гребной установки. Методика определения заключается в следующем. Вращаясь со скоростью, соответствующей максимальному КПД, винт может обеспечить постоянную скорость хода суда, если потребляемая им мощность Np (как функции скорости вращения) будет равна  , л.с., , л.с.,где NR1 – буксировочная мощность на одном гребном валу; n – частота вращения ГЭД, об/с. С другой стороны, мощность гребного двигателя, габариты которого выбраны в соответствии с размерами машинного отделения и всегда должны оставаться постоянными, изменяется пропорционально скорости вращения винта:  , кВт, , кВт,где Da=(0,630,68)D=0,65·194,8=132,5 см – диаметр ротора ГЭД;  , см; , см;g – относительный вес ГЭД, равный 712 кг/л.с.; N – мощность ГЭД, л.с.; 2р – число пар полюсов; а = 1,25 – отношение диаметра ротора к длине активного железа; с =28,4 машинная постоянная.
 3.4. Проверка правильности выбора ГЭДКПД изолированного винта можно рассчитать по формуле  , ,где  - коэффициент упора винта; - коэффициент упора винта;nопт =140/60=2,33 об/с – оптимальная частота вращения винта; D – диаметр гребного винта, м;  - коэффициент момента винта; - коэффициент момента винта; - относительная поступь гребного винта; - относительная поступь гребного винта; Н·м величина момента упора винта; Н·м величина момента упора винта;Np – мощность винта, л.с.; Р – сила упора, кг; =1025 кг/м3 - плотность воды. Пропульсивный КПД  , ,где i = 0,971 – множитель, учитывающий неравномерность потока воды при различном положении лопастей винта по отношению к обводам корпуса судна. Мощность на гребном валу, необходимая для движения судна с требуемой скоростью  кВт, кВт,где zв – число гребных валов. Мощность на валу ГЭД  кВт, кВт,где е = (0,95—0,98) – КПД валопровода. Если после выполненного проверочного расчета мощность ГЭД будет отличаться от расчетного значения более, чем на 20%, то следует выбрать другой двигатель и проделать расчет снова.  3.5. Выбор главных генераторовЧисло главных генераторов будет выбрано правильно, если удастся обеспечить высокий КПД установки и ее небольшую стоимость, простоту обслуживания и надежность работы. В ГЭУ постоянного тока мощностью более 1500 кВт обычно устанавливают два генератора и более. Мощность главных генераторов определяют по мощности гребных электродвигателей и числу генераторов PГГ = 2160 кВт; U = 600 B; nном = 330 об/мин; ηГЭД = 94,3 %; mобщ = 18,2 т; Iа = 3600 A; p = 4; Uв=220 В; Rа = 0,0022 Ом; Rд.п. = 0,0018 Ом; Rв.пар. = 1,88 Ом; Rв.пос. = 0,0099 Ом;  Скорость генераторов выбирают в соответствии со скоростью первичных двигателей. [3-4, 11-12]. Конструктивное исполнение корпуса главных генераторов должно быть брызгонепроницаемым или водозащищенным с вентиляцией по замкнутому или разомкнутому циклу. После выбора генераторов необходимо привести их основные параметры, как это делалось для ГЭД. 4. Разработка схемы главной цепи ГЭУСхемы соединения генераторов могут быть последовательные, параллельные и попеременно-последовательные. Перед разработкой схемы главной цепи необходимо проанализировать достоинства и недостатки каждого из возможных вариантов. Затем составить схему главного тока и таблицу замыканий контактов избирательных переключателей главной цепи с учетом требований Регистра и возможности обеспечения экономических и аварийных режимов работы ГЭУ [1-10]. 5. Построение желаемых статических характеристик [1-10]5.1. Построение рабочих характеристик винтаВсе типы судов в соответствии с исходными данными подразделяются на транспортные суда (ТР) и рыболовные траулеры (РТ). Для ТР рабочие характеристики строятся при ходе судна в свободной воде  и в швартовном режиме работы и в швартовном режиме работы  , причем характеристика хода в свободной воде считается основной. , причем характеристика хода в свободной воде считается основной. Примерный вид характеристик показан на рис. 1-2. 5.2. Построение желаемой механической характеристики ГЭДЖелаемая механическая характеристика ГЭД строится в относительных единицах на графике характеристик винта, полученном в предыдущем пункте расчёта. Для обеспечения постоянства мощности ГЭУ при работе в режимах от хода в свободной воде до швартовного желаемая механическая характеристика ГЭД в номинальном режиме строится в виде гиперболы постоянства мощности (ГПМ) в соответствии с зависимостью М*  . После этого графически определяются значения моментов и оборотов ГЭД в точках пересечения характеристик винта и ГПМ (точки А, В, С рис. 1-2). Это точки работы ГЭД в установившихся режимах. Номинальный момент и обороты соответствуют точке пересечения ГПМ и основной характеристики винта. . После этого графически определяются значения моментов и оборотов ГЭД в точках пересечения характеристик винта и ГПМ (точки А, В, С рис. 1-2). Это точки работы ГЭД в установившихся режимах. Номинальный момент и обороты соответствуют точке пересечения ГПМ и основной характеристики винта.Из точки А проводится отрезок, соответствующий участку механической характеристики ГЭД, обеспечиваемому регулятором напряжения. Значение частоты холостого хода в соответствии с требованиями Регистра не должно превосходить 20% от номинального. Участок механической характеристики ГЭД от ГПМ до точки на оси ординат, соответствующей моменту стоянки ГЭД под током Mст определяется в зависимости от заданного принципа регулирования следующим образом: для ГЭУ по схеме постоянства мощности задаётся момент стоянки Мст =(1,5-2,5)Мн, и из этой точки проводится отрезок до пересечения ГПМ со швартовной характеристикой; Построение желаемой механической характеристики ГЭД заканчивается пересчетом ее из относительных единиц в именованные. При этом  , Н*м. , Н*м.    М* MCT n* В А 3 2 1  Механическая характеристика двигателя и винта ТР в относительных единицах: 1 – характеристика винта при ходе в свободной воде; 2 – швартовная характеристика;
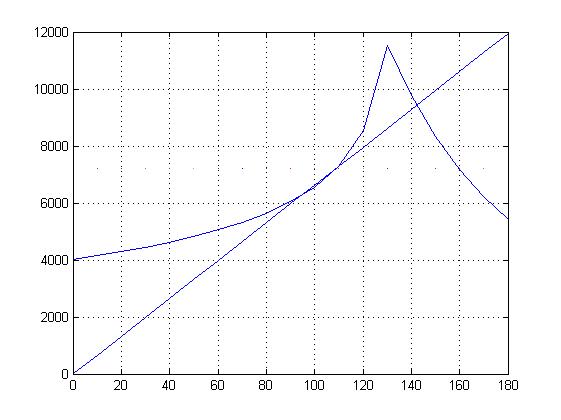
3 – желаемая механическая характеристика ГЭД 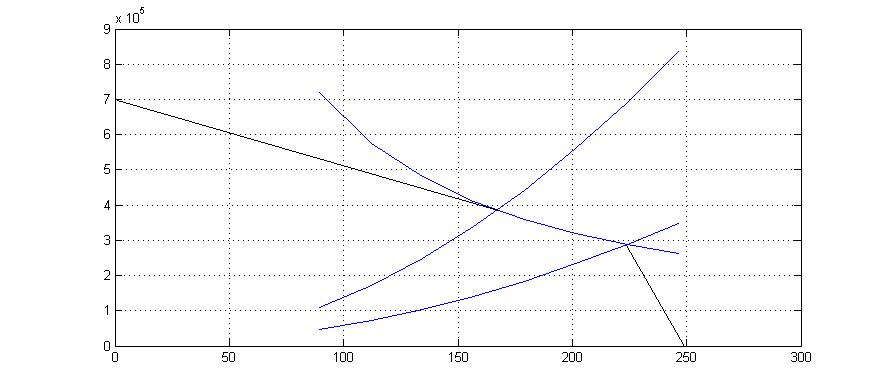 Механическая характеристика двигателя и винта ТР 5.3. Построение желаемой внешней характеристики главного генератораПри построении внешней характеристики необходимо составить расчетную схему, в которой все генераторы заменяются эквивалентным генератором. В зависимости от схемы включения рассчитываются напряжение и ток эквивалентного генератора. Сопротивление якорной цепи берут равным сумме сопротивлений отдельных генераторов. Для ГЭУ по схеме постоянства мощности желаемую внешнюю характеристику получают из желаемой механической характеристики ГЭД путём соответствующего пересчёта оборотов и момента в напряжение и ток главного генератора. Пересчёт выполняется по следующим формулам.  ; ; ; ;    - момент ГЭД. - момент ГЭД. Для ГЭУ по схеме неизменного тока желаемая внешняя характеристика генератора без учета падения напряжения в его якорной цепи представляет собой два перпендикулярным осям тока и напряжения отрезка, проведенных до этих осей из точки, соответствующей номинальному напряжению генератора и номинальному току. После построения желаемой внешней характеристики необходимо убедиться, что не нарушаются условия: UГ UГн; IГ IГн. Все результаты пересчёта сводятся в таблицу.
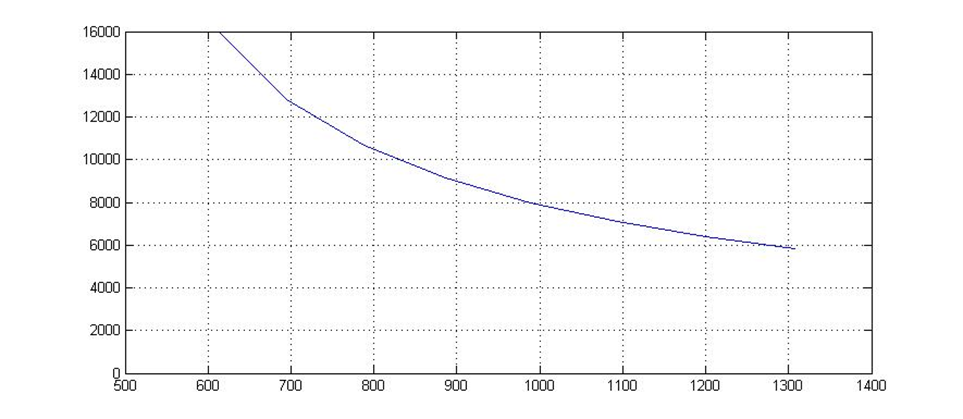 Внешняя характеристика главного генератора. Внешняя характеристика главного генератора.6. Разработка функциональной схемыОптимальные в эксплуатационном отношении автоматизированные ГЭУ в режимах переменного момента сопротивления движению судна выполняют две основные функции: осуществляют поддержание постоянства мощности главного двигателя (ГД) и регулирование частоты вращения ГЭД. Необходимость поддержания постоянства мощности ГД предъявляет жесткие требования к механическим характеристикам ГЭД и внешним характеристикам генератора. Требуемые статические характеристики могут быть получены различными средствами: - поддержание постоянства мощности ГД в широких пределах можно достичь изменением тока и напряжения генератора; - поддержание постоянства мощности ГД в узких пределах можно достичь изменением магнитного потока ГЭД как в зависимости от мощности генератора, так и в зависимости от мощности на валу двигателя. Регулирование частоты вращения ГЭД можно осуществлять изменением напряжения генератора или ослаблением магнитного потока ГЭД. Системы управления ГЭУ должны обеспечивать необходимое качество переходного процесса при пуске, реверсе, остановке и изменении скорости судна. Варианты построения функциональных схем управления весьма разнообразны. В курсовом проекте рекомендуется выбрать один из следующих вариантов, широко распространенных на практике [10]. 1. Для судов с тяжелыми условиями плавания (буксиров, ледоколов и пр.), а также некоторых транспортных судов с механической характеристикой ГЭД, имеющей вид, как на рис. 1, для выполнения требования P=const, ограничения момента стоянки и скорости холостого хода необходимы регуляторы мощности, тока и напряжения, включенные параллельно, а также соответствующие измерительные преобразователи, включенные в цепи отрицательных обратных связей. Работа регулятора тока. Если ток в главной цепи резко возрастает и его значение становится больше допустимого тока стоянки Iст, то вступает в действие регулятор тока, формируя такой управляющий сигнал для системы управления тиристорами, чтобы ограничить ток до его значения, соответствующего моменту стоянки на механической характеристике. Регулятор мощности при этом находится в насыщении. Работа регулятора напряжения. Регулятор напряжения осуществляет ограничение напряжения генератора до значения, соответствующего скорости холостого хода стоянки на механической характеристике. В случае резкого снижения тока напряжение генератора возрастает и становится больше значения Uхх. Вступающий в действие регулятор напряжения ограничивает напряжение генератора. Регулятор мощности при этом не действует. Работа регулятора мощности. Регулятор мощности поддерживает постоянство мощности между точками А и В механической характеристики, т.е. когда n 2. Поддержание постоянства мощности путем изменения магнитного потока ГЭД в зависимости от мощности генератора применяется на судах с обычными условиями плавания: пассажирских, грузовых, рыболовных, у которых швартовный режим является кратковременным, и допустимы кратковременные перегрузки. Для реализации желаемых характеристик генератора и ГЭД необходимо, чтобы при изменении момента сопротивления гребного винта магнитный поток ГЭД менялся таким образом, чтобы мощность оставалась постоянной. Так, при снижении момента сопротивления на валу ГЭД уменьшается потребляемая мощность. Работа регулятора мощности. В основном режиме магнитный поток двигателя номинальный, номинальная мощность, и сигнал на выходе регулятора мощности равен нулю. Уменьшение момента сопротивления на гребном валу приводит уменьшению тока в главном контуре. Таким образом, мощность генератора уменьшается. Регулятор мощности должен работать таким образом, чтобы снижать магнитный поток ГЭД, в результате чего частота вращения ГЭД будет повышаться, а вместе с нею будет повышаться потребляемая мощность. Регуляторы тока и напряжения будут ограничивать соответствующие параметры так же, как описано в предыдущем случае. Таким образом, САУ включает три регулятора: регулятор тока, регулятор напряжения и регулятор мощности. 7. Выбор возбудителей, постов управления и избирательных переключателей7.1. Выбор тиристорных преобразователей для питания обмоток возбужденияДля судовых условий эксплуатации разработаны тиристоры серий ВКУ, ВКУВ, ВКДУЛ, ВКДУЛВ, Т, ТД, ТВ, которые так же, как и вентили, делятся на классы в зависимости от допустимого номинального амплитудного значения напряжения и на группы — в зависимости от среднего за период падения напряжения на открытом тиристоре при прохождении номинального тока. Выбор тиристорных преобразователей производится по справочнику [1-3], исходя из данных машин главной цепи ГЭУ, выбранной системы возбуждения (индивидуальная, централизованная, смешанная), схемы включения обмоток возбуждения, и учетом необходимости обеспечения примерно двукратной форсировки напряжения и тока возбуждения. Мощность возбуждения принимается равной 0,5% от мощности генератора и 0,6-1% от мощности ГЭД (меньшие значения для ГЭД мощностью выше 10000 кВт, большие – для ГЭД мощностью меньше 10000 кВт). С учетом обеспечения необходимой форсировки возбуждения в переходных режимах, полученная мощность увеличивается в 2-2,5 раза. Кроме основных возбудителей рекомендуется предусматривать резервные возбудители, которые с помощью специальных переключателей могут быть подключены к схеме возбуждения взамен вышедшего из строя основного возбудителя. При применении двухъякорных ГЭД обычно предусматривается один резервный возбудительный агрегат для обоих контуров главного тока (для якоря ГЭД и работающих на него генераторов); резервные возбудители могут включаться в схему взамен любого из двух рабочих возбудителей. В пояснительной записке приводятся сведения о требованиях Регистра к системам возбуждения, описания достоинств и недостатков тиристорных возбудителей, схем включения, возможных режимов работы и способов управления. Выбираем :
7.2. Выбор постов управленияПосты управления выбираются по справочной литературе [4], исходя из требуемого количества режимов и уровня выходного сигнала. Пост управления служит для изменения режима работы ГЭД (регулирования мощности, частоты вращения и направления вращения ГЭД и т. п.) [4]. Выход поста управления является управляющим сигналом системы регулирования и может подаваться на обмотки возбуждения генераторов и ГЭД или их возбудителей или на вход регулятора (например, регулятора мощности, регулятора частоты вращения и т. п.). Как правило, пост управления имеет одно среднее — нулевое — положение «стоп» и по 15—20 положений «вперед» и «назад». Иногда для более четкой и гарантированной остановки ГЭД применяют «расширенное нулевое положение», при этом на первых положениях «вперед» и «назад» возбуждение ГЭД и генераторов еще не включается. В качестве постов управления ГЭД могут использоваться контактные (реостат, потенциометр и т. п.) или бесконтактные (сельсин, вращающийся трансформатор и т. п.) аппараты. Повышение надежности контактных постов управления может быть достигнуто применением неподвижных контактов, управляемых электромагнитным полем и заключенных в вакуумный сосуд (например, герконов и т. п.). При выборе типа поста управления учитываются возможности обеспечения необходимого (равномерного или по определенному закону) прироста мощности или частоты вращения ГЭД по положениям поста управления. Это достигается, например, подбором величины ступеней сопротивления потенциометрического реостата поста управления или получением соответствующей формы выходного напряжения бесконтактного поста управления. Как правило, посты управления имеют равномерное приращение угла поворота по положениям, поэтому практически равномерное приращение частоты вращения (мощности) ГЭД от минимального до максимального значения достигается при прямолинейной зависимости выходного сигнала от положения поста управления. В некоторых постах управления предусматриваются моторные приводы потенциометрических реостатов (или сельсинов), что позволяет осуществлять затяжку во времени изменения задающих сигналов цепи возбуждения — это обеспечивает более спокойное протекание переходных процессов при изменении режима работы ГЭУ. На судне предусматривается как минимум два поста управления ГЭД; основной и резервный. Основной пост управления располагается в ходовой (рулевой) рубке, резервный — непосредственно у гребного электродвигателя или в щите электродвижения. Иногда схемами электродвижения предусматривается дистанционный набор режима работы ГЭУ (включение в работу генераторов) из центрального поста управления силовой установкой судна (ЦПУ), без постоянной вахты у щитов электродвижения и ГЭД. В этом случае резервный пост управления гребными электродвигателями устанавливают в ЦПУ — либо в виде отдельного аппарата, либо встроенным в пульт электродвижения. С учетом характера работы судна при различных условиях плавания устанавливают дополнительные посты управления на верхнем ходовом мостике, в кормовой оконечности или другом месте судна. На верхнем мостике и в ходовой рубке ледоколов для обеспечения оперативного управления судном устанавливают несколько органов управления — обычно по бортам и в ДП. В качестве органов управления используются тумбы машинного телеграфа, которые имеют специально выведенные концы валиков для связи с постом управления ГЭД. Чтобы рукоятки всех тумб машинного телеграфа, установленных в одном помещении, и пост управления ГЭД поворачивались строго синхронно, их связывают между собой электрическим валом или механическим валикоприводом. Выбираем: ПУ 6918 Кол-во положений (в одну сторону) 16 Число блок-контактов 2 7.3. Выбор избирательных переключателей [3-4]В ГЭУ постоянного тока для набора схем главного тока обычно применяются специальные коммутационные аппараты, называемые избирательными (или селекторными) переключателями, которые обеспечивают одновременные переключения, как в цепях главного тока, так и в цепях возбуждения, управления, защиты и сигнализации. Избирательные переключатели имеют главные контакты, контакты возбуждения и вспомогательные контакты. Для каждого контура главного тока предусматривается, как правило, один избирательный переключатель (иногда отдельный избирательный переключатель предусматривается для каждого главного генератора). Конструктивно избирательный переключатель представляет собой аппарат, аналогичный контроллеру кулачкового типа с механическим редуктором, встраиваемый в щит гребной установки и управляемый с лицевой стороны при помощи штурвала. Избирательные переключатели изготовляются, как правило, в открытом исполнении. Отечественная промышленность выпускает в основном избирательные переключатели серии ПС-69, без дугогашения в цепи главного тока. Выбираем:
8. Разработка схемы защиты, блокировки и сигнализации8.1. Виды защитыРегистр предусматривает следующие виды защит и блокировок: защита от коротких замыканий и сверх токов в главном контуре ГЭУ; защита от самопроизвольного реверса дизель - генераторов; защита от разноса дизель генераторов; защита от разноса ГЭД; нулевая защита; блокировка от неправильных переключений избирательных переключателей. При разработке схемы защиты следует использовать типовые решения, рассмотренные в приведенной литературе. 8.2. БлокировкиВ ГЭУ постоянного и переменного тока широко используются блокировки, назначение которых двоякое: с одной стороны, с их помощью можно избежать запретных последовательностей включений или выключений, совокупность которых может повести к аварийным ситуациям, с другой стороны, облегчить управление установкой путем достижения первой цели и усилить безопасность обслуживания. Блокировки, применяемые в ГЭУ, могут быть механическими и электромагнитными. Механические блокировки более просты, но могут блокировать объекты, находящиеся только в пределах одного помещения и по возможности расположенные недалеко друг от друга. Блокировки электромагнитного типа, выполняемые обычно в виде электромагнитных замков, свободны от этих ограничений, но требуют для своего функционирования источника питания. Число и характер необходимых блокировок определяются в каждом отдельном случае конкретной схемой. В общем случае Правила Регистра Российской Федерации требуют в каждой ГЭУ иметь блокировку, которая обеспечила бы снятие рабочего напряжения с цепей ГЭУ при входе лиц обслуживающего персонала внутрь кабин распределительного устройства. Обязательными являются блокировки переключателей постов управления, избирательных переключателей, разъединителей в контуре главного тока и переключателей возбуждения. Должны быть предусмотрены блокировки, не допускающие пуск главных генераторов при отсутствии охлаждающей воды в системе охлаждения установки, не допускающие включение ГЭУ при непрогретых главных дизелях, и некоторые другие, диктуемые особенностями данной установки, без которых она не может считаться безопасной для обслуживания или достаточно надежной при эксплуатации. Блокировка избирательных переключателей осуществляется обычно с помощью электромагнитных замков (защёлок). Набор схемы главного тока возможен только в обесточенном состоянии установки. Штурвалы переключателей, возможно, поворачивать только при подаче питания на катушки электромагнитных защёлок, все переключатели цепей управления, подающие напряжения на цепи управления должны быть в положении «Питание защёлки от основного или резервного ГПН». 8.3. Виды сигнализаций, применяемых на судах с электродвижением:Сигнализация о падении давления в системе охлаждения дизеля ниже допустимого предела, осуществляется, как правило, лампами красного цвета; Сигнализация о нарушении нормальной работы генераторов, осуществляется также лампами красного цвета. Сигнальные лампы загораются при падении давления воды в охладителях выходящего воздуха генераторов (замыкаются обычно контакты реле давления воды); Сигнализация об отключении одного контура тока (если таковой есть в схеме главной цепи ГЭУ). Осуществляется такая сигнализация лампами красного цвета; Сигнализация о заземлении цепей главного тока; Сигнализация об отключении вентиляторов гребного электродвигателя; Сигнализация о готовности дизелей к приёму нагрузки. Осуществляется лампами белого цвета; Сигнализация о наборе заданного режима работы гребной электрической установки. Осуществляется красными сигнальными лампами; Сигнализация о срабатывании электромагнитных замков, т.е. о снятии блокировки с переключателей генераторов; Сигнализация о срабатывании защиты от короткого замыкания и перенапряжения осуществляется красными сигнальными лампами; Сигнализация о перегрузке в цепях главного тока, осуществляется красными сигнальными лампами; Сигнализация о нарушении нормальной работы гребного электродвигателя осуществляется красными сигнальными лампами; Сигнализация об открытых дверях щита электродвижения осуществляется красной сигнальной лампой; Сигнализация о наличии воды в сточном колодце в помещении гребного электродвигателя осуществляется красной сигнальной лампой; Сигнализация о включенном валоповоротном устройстве осуществляется красной сигнальной лампой; Сигнализация о месте управления гребного электродвигателя осуществляется белыми сигнальными лампами; Звуковые сигналы срабатывают при заземлении в цепи главного тока и при срабатывании контактора, размыкающий контакт которого замыкается в случае обесточивания контура тока из-за срабатывания защиты. Ревун звучит до тех пор, пока рукоятка поста управления не будет переведена в положение «Стоп». ЗаключениеСистема ГЭУ постоянного тока имеет более широкий диапазон регулирования скорости для ГЭУ. Маневренность системы, очевидно, высока. Существует возможность экономической модели в системе электростанции постоянного тока. Несмотря на высокую стоимость и сложность системы питания постоянным током, система доказала свою рациональность. Система чрезвычайно маневренна, имеет обширную частотную регулировку GED, может работать в экономичном режиме и надежна. ЛитератураАкулов Ю.И. Гребные электрические установки (устройство и эксплуатация) Издание второе, дополненное и переработанное. Издательство «Транспорт», 2019, стр. 67-304. Акулов Ю.И. Гребные электрические установки. М,: Издательство «Транспорт», 2018. – 264 с. Гребные электрические установки: Справочник/ 10.Н. Авик, Е.Б. Айзенштанд, Ю.М. Гилерович и др. - Л.: Судостроение, 2019. -320с. Гребные электрические установки: Справочник/ Е.Б. Айзенштандт, Ю.М. Гилерович. Б.А. Горбунов, В.В. Сержантов. - Л.: Судостроение, 2018.-304 с. Гребные электрические установки. Методические указания и контрольные задания для заочных факультетов высших учебных заведений по специальности 1613 «Эксплуатация судового электрооборудования», разработанные Ароновым О.Н.- Мурманск: МВИМУ, 2018.- 147 с. Михайлов В.А, Рукавишников С.Б, Фрейдзон И.Р. Электродвижение и электропривод судовых механизмов. Издательство «Судостроение». Л. 2019. стр.607. Полонский В.И. Электрооборудование и электродвижение судов. М.: Издательство «Транспорт», 2018. – 291 с. Полонский В.И., Хайкин А.Б. Автоматизированные гребные электрические установки. — М.: Транспорт, 2017. - 432 с. Рукавишников С.Б. Автоматизированные гребные электрические установки. - Л.: Судостроение, 2018. - 296 с. Рукавишников С.Б. Автоматизированные гребные электрические установки. - Л.: Судостроение, 2019. - 180 с. Справочник по электрическим машинам. Том 1/Под общей редакцией доктора технических наук И.П.Копылова, и кандидата технических наук Б.К.Клокова, М.: Энергоатомиздат 2018. – 449 с. Справочник по электрическим машинам. Том 2/Под общей редакцией доктора технических наук И.П.Копылова, и кандидата технических наук Б.К.Клокова, М.: Энергоатомиздат 2019. – 439 с. Хайкин А.Б., Васильев В.H., Полонский В.И. Автоматизированные гребные электрические установки. - М.: Транспорт, 2016. - 418 с. Чекунов К.А. Судовые электроприводы и электродвижение судов. - Л.: Судостроение, 2016.-312 с. Чекунов К.А. Судовые электроприводы и электродвижение судов. - Л.: Судостроение, 2016. - 352 с. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 19
19