Путевые машины ВПР-1200. ПутьМаш. Выправочноподбивочнорихтовочная машина впр1200
 Скачать 0.82 Mb. Скачать 0.82 Mb.
|

1 2 ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ Кафедра «Подъемно-транспортные, путевые и строительные машины» Пояснительная записка к курсовому проекту по дисциплине «Путевые машины» Тема: «Выправочно-подбивочно-рихтовочная машина ВПР-1200» ВПР-1200.00.000.ПЗ Выполнил студент Механического факультета Кочанов И.А Группы ПТМ-509 Проверил: Санкт-Петербург 2009 Задание на курсовой проект. Содержание. Задание на курсовой проект. Введение. Назначение и область применения ВПР-1200. Техническая характеристика ВПР-02. Компоновка основных узлов и агрегатов ВПР-1200. Расчёт габаритов ВПР-1200. Проверка прохождения путевой машиной кривой и горки. Расчет устойчивости путевой машины. Расчет распределения статических нагрузок, передаваемых колёсными парами путевой машины на рельсы. Расчёт продольной устойчивости путевой машины. Расчёт поперечной устойчивости путевой машины. Расчёт устойчивости путевой машины против схода с рельсовой колеи. Тяговый расчёт ВПР-1200. Составляющие сопротивления: движению ВПР-1200. Оценка тяговых возможностей систем движения ВПР-1200. Охрана труда и техника безопасности при работе на ВПР-1200. Технико-экономический расчет. Список используемой литературы.   Введение. В данном курсовом проекте рассматривается выправочно-подбивочно-рихтовочная машина ВПР-1200.Пояснительная записка содержит описание и обоснование выбранной конструкции с решением вопросов ее управления, расчеты, подтверждающие надежность конструкции машины, сведения по технологии и организации с применением разрабатываемой машины, расчеты ожидаемых технико-экономических показателей и т.д. При всех видах ремонтов и текущем содержании пути производится выправка его продольного и поперечного профилей (нивелировка пути), выправка пути в плане (рихтовка), а также уплотнение балласта под шпалами (подбивка шпал). Выправка поперечного профиля предусматривает устранение перекосов (выправка по уровню). Для механизации этих работ применяют выправочно-подбивочные и путерихтовочные машины, которые разделяются на две группы: цикличного действия, выполняющие одну или несколько операции за цикл с остановками у каждой шпалы, и непрерывного действия, выполняющие без остановок одновременно одну или несколько операций. Последние отличаются более высокой производительностью. На железных дорогах РФ применяются машины обеих групп. К первой группе относятся Выправочно-подбивочно-рихтовочная машина ВПР-1200(ВПР-02) и выправочно-подбивочно-рихтовочная машина для пути и стрелочных переводов ВПРС-500. Вторая группа представлена рихтовочной машиной Р-2000, выправочно-подбивочно-отделочными машинами ВПО-3000, ВПО-3000М, электробалластерами с рихтовочными устройствами и путерихтовочной машиной системы Балашенко. Назначение и область применения ВПР-1200. Машины данного типа широко используют при восстановительных работах на железнодорожном транспорте. ВПР-1200 предназначена для выправки пути в продольном профиле, по уровню и в плане, уплотнения балластной призмы под шпалами и около их торцов при работах по техническому обслуживанию и пути и при новом строительстве. Машина самоходная, цикличного действия. Основные уплотнительные рабочие органы - подбивочные блоки — уплотняют балласт под шпалами, а дополнительные — у торцов шпал. Подбивочные блоки имеют три основных механизма: вибрации, сведения-разведения (подачи) подбоек и вертикального перемещения блоков, обеспечивающих уплотнение за один цикл двух рядом лежащих шпал в зоне с наружной и внутренней стороны рельса способом горизонтального виброобжатия. Выправочные устройства машины предназначаются для выправки пути в продольном профиле, по уровню и в плане. Они обеспечивают измерение отклонений в положении пути, выработку и передачу сигнала на управление механизмами подъемки и сдвижки, контроль результатов выправочных работ и запись положения пути. На машинах класса ВПР установлены независимые измерительные устройства для продольного профиля каждой рельсовой нити, плана пути и поперечного профиля, образующие нивелировочную, рихтовочную и контрольную системы. В зависимости от требований, предъявляемых к пути, выправочные системы работают по методу сглаживания или фиксированных точек (по расчету) с использованием лазерной визирной тележки и бортовых управляющих вычислительных комплексов. Машины оборудуются контрольными системами, позволяющими записать для последующего анализа на бумажную ленту самописца значений стрел изгиба и положения пути по уровню. Техническая характеристика ВПР-1200. Производительность: шпал/ч………………………………………………………………... 900-1200 Точность выправки пути, мм: По уровню…………………………………………………………... ± 2 » рихтовке…………………………………………………………… ± 2 Точность срабатывания контрольно-измерительной системы, мм…………………………………………………………… ± 0,5 Мощность двигателя при 2100 об/мин, кВт ...........………………… 176,5 Число подбоек в подбивочном блоке, шт. ...…………………....….. 16 Число одновременно подбиваемых шпал, шт.……………………...... 2 Максимальное заглубление подбоек от головки рельса, мм .......... 475 Частота колебания подбоек, Гц …………………….…………….. 35 Максимальное усилие, кН: при подъемке пути…………………………………………….......... 250 » рихтовке ………………………………………………….......... 140 Высота подъема пути при рельсах Р65, мм ....................................... 100 Величина сдвижки при рельсах Р65, мм …………………………. 100 Рабочее давление в системе привода, МПа: уплотнителя балласта ………………………………………… … 8,0 эксцентрикового вала…………………………………………… … 17,0 рабочих органов…………………………………………………. … 14,0 Приведение машины из транспортного положения в рабочее, мин…………………………………………………………. 10 Приведение машины из рабочего положения в транспортное, мин……………………………………………..……. 7 Скорость движения в транспортном режиме, км/ч …………………. 80 Масса машины с прицепной платформой, т ………………………… 51,4 Обслуживающий персонал, чел………………………………………. 3 Компоновка основных узлов и агрегатов. Машина ВПР-1200 (производительностью до 1200 шпал ч) предназначена для выправки пути в продольном профиле, по уровню и в плане, уплотнения балласта под шпалами и у торцов шпал при строительстве, всех видах ремонта и текущем содержании железнодорожного пути с рельсами до Р65 включительно с деревянными и железобетонными шпалами на всех видах балласта. Машина I (рис. 1) представляет собой самоходную железнодорожную единицу, к которой присоединена платформа II. Рама 6 опирается на две двухосные тележки 1, 13; из них передняя 13 приводная. Все оси машины и платформы оборудованы тормозами. В двух кабинах 2, 14 оборудованы рабочие места машиниста и операторов, управляющих машиной. В передней кабине 14 расположены контрольно-измерительные приборы и устройство для записи состояния пути. Из кабины 2 осуществляется управление дизелем и рабочим циклом машины. Для связи между исполнителями в кабинах оборудована система громкоговорящей связи, торможение машины и подача сигнала о ее приближении могут быть осуществлены из любой кабины. На раме машины установлены рабочие органы: подбивочные блоки 3, уплотнители балласта у торцов шпал 4 и подъемно-рихтовочное устройство 5. средней части машины размещены реверс-раздаточная 7 и раздаточная 11 коробки, связанные с дизелем ЯМЗ-238 и колесными парами карданными валами 8, 12, компрессоры пневмосистемы, генератор и др. Силовая установка 9 и приводные агрегаты закрыты капотом 10 со съемными боковыми щитами. На машине и платформе размещены тележки А, Б, В, Г, Д, Е контрольно- измерительной системы, подъем и опускание которых производятся при помощи пневмоцилиндров. Между штангами нивелировочной системы, расположенными в передней и задней кабинах, натянуты нивелировочные тросы, проходящие параллельно рельсовым нитям. При движении в транспортном режиме машиной управляет машинист, находящийся в задней кабине. При этом наблюдение за тем, свободен ли путь, а также сигналами ведется из кабины оператора. Команды передаются машинисту по переговорному устройству. В рабочем режиме управление машиной может быть ручное, полуавтоматическое и автоматическое. При ручном управлении команды на переезд машины от шпалы к шпале, опускание подбивочного блока и сжатие подбоек подаются машинистом, находящимся на месте оператора в кабине водителя. При полуавтоматическом управлении команды на переезд машины и опускание подбивочных блоков подаются машинистом, а на сжатие подбоек — автоматически, после заглубления блока. При автоматическом управлении весь цикл совершается автоматически, время подбивки устанавливается при помощи реле времени. Выправка пути производится одновременно с подбивкой по одному из трех методов: сглаживанием, по фиксированным точкам, по лазерному лучу. Основными частями машины ВПР-1200 являются экипажная часть, рабочие органы, контрольно-измерительная, гидравлическая и пневматическая системы, а также электрооборудование. 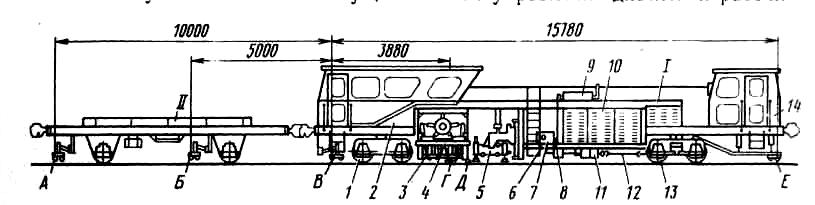 Рис.1.Схема выправочно-подбивочно-рихтовочной машины ВПР-1200. Расчёт габаритов ВПР-1200. Так как большинство путевых машин выполнены на железнодорожном ходу, размер поперечного сечения их не должны превышать определенных пределов. Это предотвращает соприкосновение их с неподвижными единицами, находящимися на соседнем пути или с сооружениями, расположенными вблизи пути. Путевые машины, предназначенные для обращения по магистральным дорогам, строятся по габариту 1 - Т. 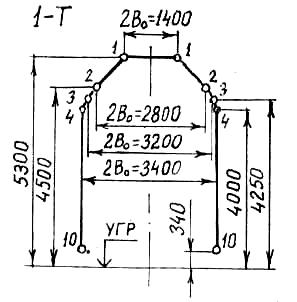 Рис.2.Верхние очертания габарита 1-Т. Путевая машина, как подвижная единица имеет корпус, который опирается на переднюю и заднюю ходовые тележки через шкворневые узлы (шарниры соединения корпуса с тележками) и соответствующие опорные элементы. При движении машины в кривой, тележки поворачиваются в плане относительно корпуса. 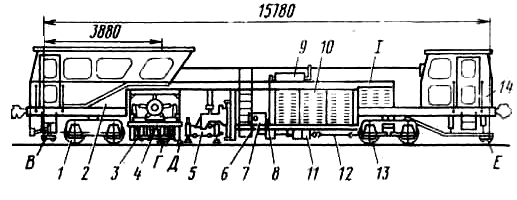 Рис.3. Продольные размеры и характерные сечения путевой машины при расчете ее строительных очертаний. Характерные продольные размеры машины: l - длина пролетной части машины, или жесткая (шкворневая) база, l = 11м; PMN, РMХ - меньшая и большая жесткие базы тележек, PMN=РMХ =1,5 ; nMN,nMX- длина наибольшей и наименьшей консольных частей, nMN =3,43; nMХ = 2, 04 м, Строительные очертания путевой машины определяются в поперечных сечениях: О - направляющие сечения, расположены в шкворневых узлах соединения тележек корпуса; В - внутренние сечения, лежащие на расстоянии пn= 5,5 м; Н - Наружные сечения, лежащие в консольных частях машины на расстоянии nк = 2,7 м, от соответствующего направляющего сечения. Дополнительное ограничение для внутреннего сечения, исходя из условия вписывания в кривую радиуса R = 150 м, α, мм 11,0 ·5,5 – 5,5 2 + 0,25·1,52=30,8 Т.е. α=0. Дополнительное смещение в кривой расчетного радиуса R= 200 м корпуса машины, как тележечной подвижной единицы k1, мм, k1= 0,625· Коэффициент размерности, зависящий от принятого в расчете радиуса кривой R, для габарита 1 - Т: k2 = 2, 5 мм/м2 ; Величина, на которую допускается выход машины за очертания габарита 1 –T: k3= 180 мм (фактически это расчетное уширение габарита в кривой R= 200 м). Предложив, что для данного поперечного сечения ограничения связаны с нахождением машины в кривой, проверяем соотношение: Условие выполняется, поэтому расчет ограничения рассматриваемого осевого сечения машины ведется на прямом участке пути. где Sn- максимально допустимая ширина колеи на прямой. При скорости движения поездов до 50 км/ч S n = 1520 +10 = 1530 мм; 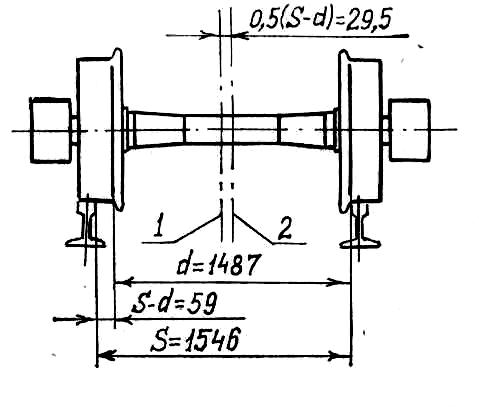 Рис.4.Смещение колесной пары при максимальном уширении колеи в кривой предельном износе реборд d - минимальное расстояние между наружными гранями предельно изношенных реборд, мм; d= 1437 + 2·25 = 1487; q, ω - наибольшие возможные поперечные смещения в направляющем сечении в сторону рамы тележки относительно колесной пары в буксовых узлах и в узлах сочленения рамы тележки и корпуса машины, вследствие выборки зазоров и упругих смещений, q + ω = 25 мм; 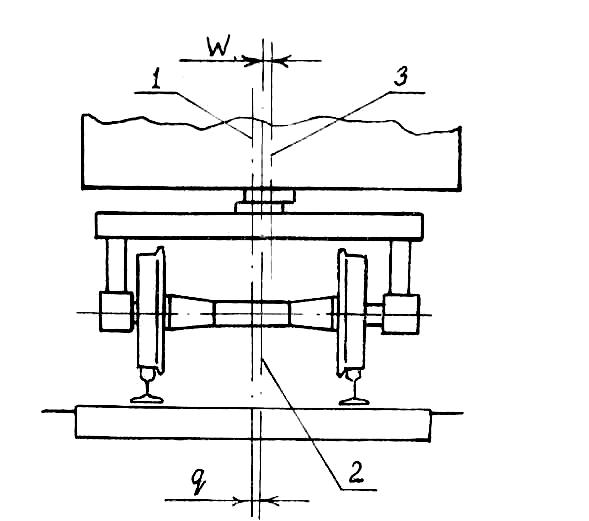 Рис.5.Смещение корпуса путевой машины при выборке зазоров и упругих смещенияхбуксовых и шкворневых узлах ходовых тележек. 1 - ось симметрии колесной пары; 2 - ось симметрии рамы тележки; 3 - симметрии корпуса машины. 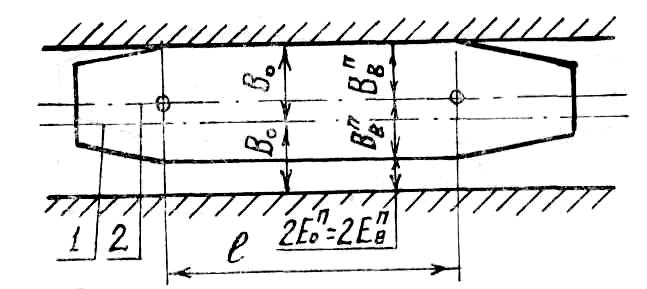 Рис.6. Ограничения строительных очертаний путевой машины при движении попрямой для направляющих и внутренних сечений. 1 - продольная плоскость симметрии пути; 2 - продольная плоскость симметрии корпуса машины. 2,5 ·(11,0 – 5,5)· 5,5 + 1,4 -180 = -102,975 < 0; Т. е. расчет ограничения наружного сечения производим на прямом участке пути. 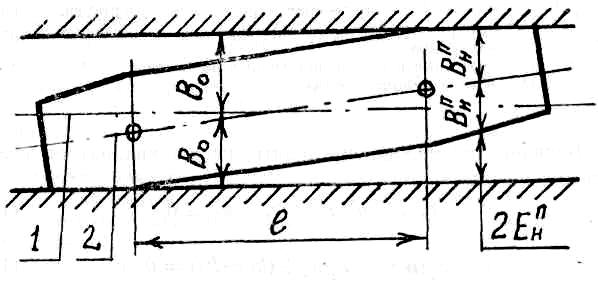 Рис.7. Ограничения строительных очертаний путевой машины при движении по прямой для наружных сечений. Наибольший поперечный размер строительного очертания: Таким образом, машина вписывается в габарит 1 - Т ГОСТ 9238 - 83, т.е. органы в транспортном положении не выходят за расчетные поперечные размеры строительных очертаний с учетом плюсовых допусков на изготовление и ремонт. Проверка прохождения путевой машины кривой и горки. Путевые машины в сцепленном состоянии должны свободно проходить кривые малого радиуса. Максимально допустимый угол отклонения автосцепки в окне розетки, исключающий саморасцеп - один из основных факторов, определяющих проход сцепленных вагонов по кривым. Наибольшее смещение продольной оси автосцепки относительно продольной оси машины возникает при движении сцепа машины с вагоном по S-образной кривой. Расчетная схема прохождения путевой машины S-образной кривой представлена на рис.8. 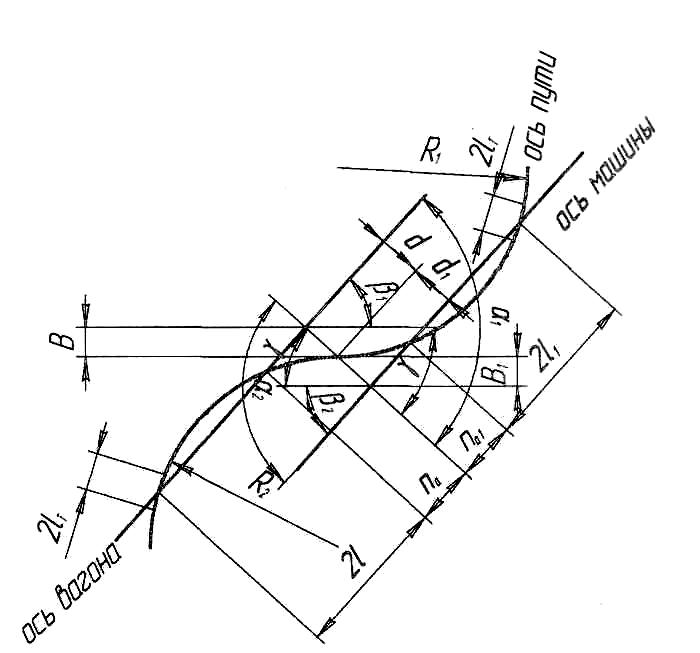 Рис. 8. Расчетная схема прохождения путевой машины S-образной кривой. Углы отклонения продольных осей автосцепок от продольных осей кузовов: где β1 ,β2 - соответственно углы поворота продольных осей машины и вагона, стоящих в кривых, относительно оси ОХ; у - угол между осями автосцепок и осью ОХ. где 2l, 2l1 - соответственно базы машины и вагона, l= 3,0 м, l1= 2,5 м; R1 = R2 = 300 м - радиусы кривой; nа, nа1 - расстояние от пятковых сечений до центра шарниров хвостовиков корпусов автосцепки (А1 и А), м; nа= nа1=1,756 м; а, а1 - длины корпусов автосцепок СА - 3, измеренные от центра шарнира хвостовика до оси сцепления, м; а = а1=0,87 м; b, b1 - поперечные смещения центров шарниров A и A1 в направлении оси OY. ζ- дополнительное поперечное отклонение точек А и A1, обусловленное смещением ходовых частей, м; ζ=0,002; где 2lT , 2lT1 - соответственно базы тележек машины и вагона, м; 2lT = 2lT1 = 0; α1 =1,4+1,0=2,4°; α2=1,4+1,1=2,5°; Проходимость кривой без саморасцепа обеспечивается, если α2<αмах; α1<αмах, αмах=12°10´; 2,4°<12°10´; 2,5°<12°10´; Проверка прохождения машины в сцепе с вагоном по сопряжению кривой и прямой: R1 = ∞, значит, β1=0; α1 =2,3°<12°10´; α2=2,3+1,1=3,4°<12°10´; При прохождении машиной сортировочной горки ее автосцепка, смещается по высоте относительно автосцепки смежного вагона. 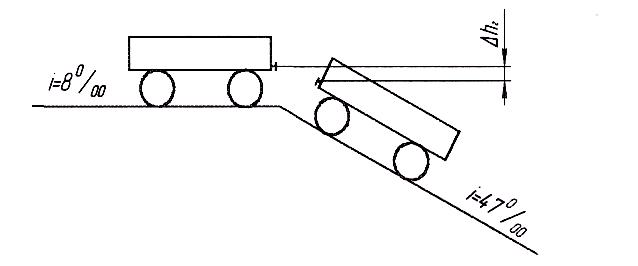 Рис.9. Расчетная схема прохождения путевой машиной сортировочной горки. Размер этого смещения зависит от профиля горки и линейных размеров машины и вагона, длины консоли, высоты автосцепки. Чтобы путевая машина без саморасцепа могла проходить горки, должно выполняться условие: ∆h + ∆hг ≤ ∆hд; где ∆h - первоначальная разность высот автосцепок у двух смежных вагонов, ∆h = 60 мм; ∆hг - дополнительное смещение на горке, ∆hг = 80 мм; ∆hд - допускаемая разность высот автосцепок, ∆hд = 180 мм; 60 + 80 = 140 мм < 180 мм. Условие выполняется, следовательно, путевая машина может проходить горку с уклоном 47 % без саморасцепа. Расчет устойчивости путевой машины. Поперечное и продольное опрокидывание путевой машины могут относительно ребер или точек опрокидывания. Для машин на железнодорожном ходу происходит относительно одной из рельсовых нитей, а продольное - относительно одной из колесных пар. Статическая нагрузка от колесной пары нормируется в зависимости от типа подвижного состава, Для путевых машин, опирающихся на типовые ходовые тележки, статическую нагрузку от оси колесной пары 240 кН при транспортном положении рабочих органов следует считать предельной. При работе машины в некоторых случаях предельной является нагрузка 330 кН. Конструкция экипажной части путевой машины выбирается таким образом, чтобы действующая на машину вертикальная нагрузка Р распределялась бы равномерно между колесными парами. Т. е. нагрузка на ось 200 кН, что меньше допустимого значения 240 кН. 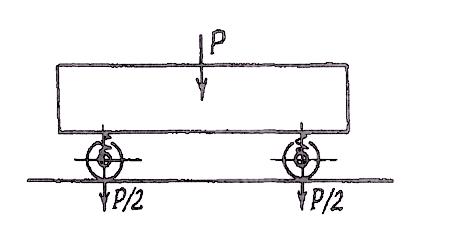 Рис.10. Распределение вертикальной симметричной нагрузки Р, действующей на машины между колесными парами Расчет продольной устойчивости путевой машины. При стоянке, работе и транспортировке на путевую машину действуют нагрузки, которые при критическом сочетании могут привести к опрокидыванию. Продольная устойчивость - способность машины противостоять действию опрокидывающих моментов в ее продольной срединной плоскости симметрии. Для машин со значительной шкворневой базой и относительно короткими консолями, оценка продольной устойчивости не актуальна, поэтому в данном курсовом проекте не рассматривается. Расчет поперечной устойчивости путевой машины. При определенном сочетании нагрузок, действующих на машину, возможно ее опрокидывание вокруг одной из рельсовых нитей, что приводит к необходимости оценки поперечной устойчивости. Опасные ситуации могут возникнуть при работе крановой установки. Расчетная схема для определения поперечной устойчивости представлена на рис.11. Такая схема обосновывается тем, что односекционная машина имеет жесткий корпус, который передает и распределяет опрокидывающие и удерживающие : нагрузки между двумя ходовыми устройствами и, опрокидывание машины может произойти только одновременно. 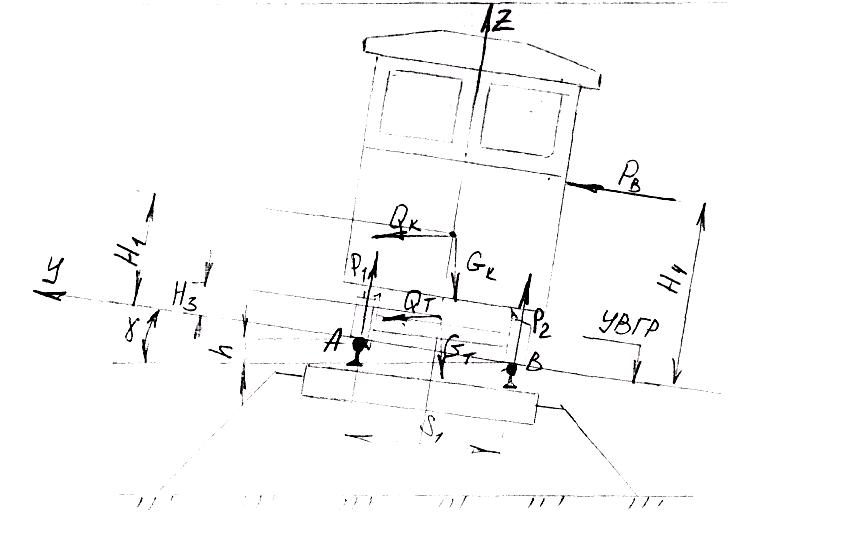 Рис.11. Расчетная схема для оценки запаса поперечной устойчивости путевой машины при работе. GK, Gm - веса корпуса машины с рабочим оборудованием и двух ходовых тележек: GK, =320 кН; Gm= 28 кН; Qk, Qm - центробежные силы, действующие на корпус машины и две ходовые тележки, вызванные движением по кривой радиуса R= 200 м, кН; где mк и тт- массы корпуса и двух ходовых тележек, кг; Н3=475 мм; Н1=0,4∙5250=2100 мм; Рв - суммарная сила давления ветра на боковую поверхность, условно приложенная в центре парусности машины, кН; Р1, P2 - суммарные реакции рельсов, действующие на ходовые колеса машины, расположенные слева и справа, кН; Н4 - высота до центра парусности боковой подветренной поверхности; Подветренная площадь, м: где а, b - размеры составляющих подветренную площадь прямоугольных элементов, м; Fв = 8,2 ∙ 0,2 + 2,5 ∙1,3 + 2,3 ∙ 2,3 + 2,9 ∙ 1,3 +11,4 ∙ 0,2 =16,2; Приветренная сила ветрового давления, кН; где рв - расчетное давление ветра, Па, Величина H4 определяется из уравнений статистических моментов подветренных площадей, м;  ; ;Реакция P1 может быть определена из уравнения моментов сил: -P1 ∙ S1+QT ∙ sin γ ∙ +Qk ∙ cos γ ∙H1 + Qk ∙ sin γ ∙ где S1 - расчетное расстояние между осями рельсов, S1 = 1610 мм; γ = arcsin -P1 ∙ 1610+6,9 ∙ (0,996∙475+0,09∙805)+28∙(0,996∙805-0,09∙475)+ +78,9∙(0,096∙2100+0,09∙805)+320∙(0,996∙805-0,09∙2100)+8,1∙0,7=0; -P1∙1610=-391850; P1=243 кН. Реакция P1может быть найдена из уравнения: P2 ∙ S1+GT∙ cosγ ∙ - Gk∙ cosγ ∙ P2∙1610 - 28∙(0,996∙805 - 0,09∙475) + 6,9∙(0,996∙475 - 0,09∙805) - - 320∙(0,996∙805 - 0,09∙2100)+78,9∙(0,996∙2100 - 0,09∙805) + 8,1∙0,7=0; P2∙1610=55261; P2=34 кН; Критерием поперечной устойчивости является величина: Расчет устойчивости путевой машины против схода с рельсовой колеи. Во время работы на путевую машину действуют разнообразные нагрузки. В отличие от обычного подвижного состава могут действовать значительные боковые, продольные и вертикальные составляющие усилий, вызывающие соответственно неравномерное перераспределение вертикальных и горизонтальных нагрузок контактах поверхностей катания колесных пара и рельс. При определенном неблагоприятном сочетании нагрузок, помимо потери продольной и поперечной устойчивости, возникает реальная опасность схода машины с рельс. На колесную пару действуют вертикальные силы P1 и Р2, прижимающие леве правое колеса к рельсам и, горизонтальная боковая сила Ур, стремящаяся сдвинуть колесную пару. Сила трения на втором колесе, кН: где μ - коэффициент трения скольжения колеса по рельсу, μ =0,2.. .0,3. Условие устойчивости: где β - угол между образующей поверхности гребня и горизонтальной плоскостью, β = 60°... 80°; 0,27<1,48 ,т. е. устойчивость машины против схода с рельс обеспечивается. Тяговый расчет ВПР-1200. Составляющие сопротивления движению: Если не поставлена специальная задача, то достаточно ограничится расчетами движения машины и сцепленных с ней подвижных единиц в тяговом режиме при работе или транспортировки. При этом возможны два случая. Первый случай - движение с постоянно заданной скоростью Vм . Сопротивлению движению машины и сцепных с ней подвижных единиц как повозки: WП1= W0± Wi+ Wr; где W0 - основное сопротивление движению на площадке, обусловленное трением в ходовых частях, неровностями пути, наличием стыков, кН; Wi - дополнительное сопротивление, обусловленное движением на подъеме - «+», на спуска - «-»), кН; Wr - дополнительное сопротивление, обусловленное движением в кривой, . Второй случай - строгание с места. Сопротивление движению машины и ней подвижных единиц, как повозки, кН: WП2=Wтр±Wi+ Wr; где Wmp- сопротивление при трогании с места на площадке, обусловленное необходимостью преодоления сил трения покоя и сил инерции в начальный период движения, кН. Основное сопротивление движению, кН; где kНТ - коэффициент, учитывающий низкую температуру наружного воздуха, kНТ= 1,1; kв - коэффициент, учитывающий дополнительное сопротивление, вызванное действием встречного и бокового ветра, kв = 1,23; oi - основное удельное сопротивление машины o1=(18,62 + 0,3528 ∙ VМ+ 0.0381∙ +0,0381∙22,22)∙ 10 -3=0,0452; Mi - масса машины, т :M1=40; Wo = 1, 1 · 1, 23 · 0, 0452 · 51,4= 3,14 кН; Дополнительное сопротивление движению, связанное с преодолением участков пути, имеющих уклон, кН; где i - уклон местности, %о; g-ускорение свободного падения, м/с2; Обозначим i = i·g· 10 -3, кН/т, тогда: где wi- удельное дополнительное сопротивление, связанное с движением на участке пути, имеющим уклон. Знак Wiуже был учтен ранее. Достаточно ограничиться расчетом машины в режиме тяги, поэтому принимаем Wiс положительным знаком, чтобы учесть наиболее неблагоприятное сочетание факторов. Принимаем i= 12 %о, что соответствует i= 117,5 · 10-3 кН/т; Wi=117,5·10 -10 ·51,4=6,03; Дополнительное сопротивление движению, связанное с преодолением кривых участков пути. При движении путевой машины по кривому участку пути в контактах поверхностей катания колесных пар и рельсов возникает скольжение, которое приводит к возникновению дополнительных сил трения. Относительно продольной оси пути их можно разложить на поперечные и продольные составляющие. Последние, как правило, не уравновешены вдоль пути. Это наряду с повышенными силами трения гребней о головки рельсов, вследствие возрастания направляющих сил, вызывает дополнительное сопротивление движению Wr, кН; где r- дополнительное удельное сопротивление, вызванное движением в кривое радиуса R, если длина рабочего поезда меньше или равна длине кривой, кН/т; Wr=0,0343·51,4=1,76кН; Сопротивление, связанное с преодолением сил трения покоя при трогании с места. В начале движения путевой машины и сцепленных с ней подвижных единиц преодолеваются силы трения и силы инерции покоя. Они обуславливают соответствующуюсоставляющую общего сопротивления движению, как повозки, кН; где mp.i- удельное сопротивление троганию с места, i - той подвижной единицы рабочего поезда кН/т; Для подвижного состава на подшипниках качения: где k - численный коэффициент, принимаемый в зависимости от количества несамоходных единиц в рабочем поезде; q0 - масса, приходящаяся на одну ось, т. Wmp= 0, 0183 · 51,4 =0,94 кН. Сопротивление движению машины и сцепленных с ней подвижных единиц как повозки, при движении с постоянно заданной скоростью: WП1= 3,14+ 6,03+1,76 = 10,93 кН; Сопротивление движению машины при трогании с места: WП2 = 0,94 + 6,03 + 1,76 = 8,73 кН. Оценка тяговых возможностей систем движения ВПР-1200. Для реализации путевой машины заданного технологического процесса с получением оптимальных результатов, а также при ее транспортировке необходимо обеспечить движение в заданном режиме, который лимитируется следующими факторами: проскальзыванием ведущих колесных пар в тяговом режиме или скольжением колесных пар в тормозном режиме; тяговой мощностью, определяемой мощностью двигателя и потерями в трансмиссии; допустимым передаваемым моментом по условиям механических свойств трансмиссии; допустимым тяговым режимом работы трансмиссии. О возможности реализовать тяговый режим при работе машины свидетельствует неравенство: FK ≥ (WП+WP)∙kту ; где kту - коэффициент устойчивости поддержания тягового режима, учитывающий наличие избыточного тягового усилия. Максимально возможная касательная сила тяги, развиваемая с учетом ограничений по сцеплению при одинаковой нагрузке ведущих колесных пар: Fк.сц=к.кр∙(Рсц ± Рр); где к.кр - коэффициент сцепления колесных пар и рельсов с учетом движения машины в кривой; Рсц - сцепной вес машины, т. е. весовая нагрузка, передаваемая через все ведущие колесные пары на рельсы, кН; Рр - дополнительная нагрузка, передаваемая через колесные пары машины (со знаком плюс 1 2 |