Экзамент АТИПТ. 1.Экзамен по АТПиП (2021). Вопрос 1. Задачи дисциплины сауиК (сухтп) и входящий в ее круг вопросов. 4 уровневые современные асутп, асу, атк. Задачи дисциплины сауиК, дать
 Скачать 66.94 Kb. Скачать 66.94 Kb.
|

|
Вопрос №1. Задачи дисциплины САУиК (СУХТП) и входящий в ее круг вопросов. 4 уровневые современные АСУТП, АСУ, АТК. Задачи дисциплины САУиК, дать: 1. Основные понятия управления технологическими процессами; 2. Основы теории автоматического управления: а) декомпозиция систем управления, статические и динамические характеристики объектов и звеньев управления, передаточные функции, типовые динамические звенья систем управления; б) системы автоматического регулирования: – статические и динамические характеристики объектов управления, переходные процессы, запаздывание и устойчивость систем регулирования, основные законы управления, релейное регулирование; в) диагностика химико-технологического процесса: – методы и средства диагностики, государственная система приборов, элементы метрологии, контроль основных технологических параметров; – основы проектирования автоматических систем управления; – типовые системы автоматического управления в химической промышленности. Четырёхуровневые системы: Автоматизированная система управления технологическим процессом (АСУТП) включает комплекс аппаратных, программных и организационных средств по выработке управляющих воздействий на величину технологического параметра с целью поддержания его на заданном уровне. Современные АСУТП включают 4 уровня: – датчики и исполнительные механизмы, устанавливаемые непосредственно на технологических объектах (уровень 0); – устройства связи с объектами и передачи данных (уровень 1); – управляющие устройства, которые способны анализировать события и вырабатывать соответствующее управляющее воздействие именуемые контроллерами или управляющие ЭВМ (электронно- вычислительная машина) (уровень 2); – автоматизированные рабочие места операторов (уровень 3) Для реализации АСУТП необходимы определенные знания как инженеров по автоматизации и технологов, значимость последних в значительной степени определяет уровень автоматизации конкретного производства. По этой причине есть предприятия с высоким уровнем автоматизации и культуры производства, а также предприятия где полностью отсутствуют какие-либо автоматизированные системы контроля и регулирования величины технологического параметра. На последних преобладает ручной труд, которые удорожает себестоимость продукции. На химических предприятиях, к которым относятся и предприятия химической переработки древесины, используются опасные величины технологических параметров, такие как температура и давление, опасные химические реагенты (кислоты, щелочи, растворители, соли и пр.), которые опасны для здоровья оператора, находящегося в непосредственной близи технологического объекта. При использовании АСУТП управление процессом осуществляется дистанционно, при этом операторов можно разместить в безопасные помещения. Также АСУТП повышает производительность производства при постоянстве продукции. Вопрос №2 Дать определение «Регуляторам непрерывного действия: П-регулятор; ПИ-регулятор; ПИД- регулятор». Описание. Назначение и принцип разработки. Примеры. Позиционные регуляторы (Пз-регуляторы) реализуют принцип «включено - выключено» и бывают двух- и трехпозиционными. Двухпозиционные регуляторы- могут устанавливать выходную величину только на минимальном Трехпозиционные регуляторы- могут устанавливать выходную величину помимо значений Пз - регуляторы несложны по конструкции, надежны в работе, просты в эксплуатации и настройке. Их применяют на инерционных объектах с малым запаздыванием. Пропорциональным (П-регулятором) называется регулятор, у которого перемещение регулирующего органа пропорционально отклонению регулируемой величины от ее заданного значения Уравнение регулятора имеет вид и = кр ∆х, где и — регулирующее воздействие регулятора; кр — коэффициент передачи (или коэффициент усиления) регулятора; ∆х, — отклонение регулируемой величины от заданного значения. Значение коэффициента усиления равно перемещению регулирующего органа регулятора при отклонении регулируемой величины на единицу ее измерения. Коэффициент кр является параметром настройки П-регулятора. Величину, обратную коэффициенту усиления регулятора, т.е. 1/кр, называют статизмом регулятора, a величину δс=(1/кр) • 100 — пределом пропорциональности, или степенью неравномерности. Значение предела пропорциональности определяют как участок шкалы измерительного прибора, выраженный в процентах длины всей шкалы, в границах которого изменение регулируемой величины вызывает перемещение регулирующего органа из одного крайнего положения в другое. Например, если предел пропорциональности составляет 80 %, то это означает, что отклонение стрелки измерительного прибора на 80 % шкалы вызовет перемещение регулирующего органа регулятора из одного крайнего положения в другое, а отклонение стрелки на 1 % шкалы вызовет перемещение регулирующего органа на 1/80 его полного хода. Особенность переходного процесса регулирования в системе с П-регулятором состоит в наличии остаточного отклонения (статической ошибки) δс в его конце. Достоинством П-регулятора является малое время переходного процесса регулирования, т.е. быстродействие, недостатком — наличие статической ошибки. Пропорционально-интегральным (ПИ-регулятором) называется регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемой величины от заданного значения и интегралу по времени от этого отклонения. Действие данного регулятора можно рассматривать как совместное действие пропорционального и интегрального регуляторов. Уравнение регулятора имеет вид  где Ти — продолжительность действия интегральной составляющей регулятора — продолжительность изодромы, с. Регулирующее воздействие ПИ-регулятора характерно тем, что в первоначальный момент введения его при отклонении регулируемой величины от заданного значения, большое воздействие, снижающее величину отклонения за малый отрезок времени, оказывает пропорциональная составляющая. В последующем большее влияние на процесс регулирования оказывает интегральная составляющая, что обеспечивает исключение статической ошибки в конце процесса регулирования. Степень введения пропорциональной или интегральной составляющей в ПИ-регулятор определяется соответственно величинами Кр и Ти, которые служат параметрами настройки регулятора. Достоинство ПИ-регулятора заключается в том, что он поддерживает заданное значение регулируемой величины при возмущениях в объекте и не имеет остаточного отклонения в конце переходного процесса регулирования. Пропорционалыю-интегрально-дифференциальным (ПИД-регулятором) называется регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемой величины от задания, интегралу и скорости этого отклонения (рис.2 д). Уравнение регулятора имеет вид  + ТД [d(∆х)/dτ]. + ТД [d(∆х)/dτ].Параметрами настройки ПИД-регулятора являются параметры Кр , Ти , ТД . Из всех рассмотренных автоматических регуляторов ПИД-регулятор наиболее сложный как по принципу действия, так по устройству и наладке. ПИД-регуляторы целесообразно применять на инерционных объектах с большим запаздыванием и жесткими технологическими требованиями к процессу регулирования. И-регулятор практического применения не имеет, а входит как составляющий в структуру сложных ПИ- и ПИД-регуляторов. Вопрос №3 Регулирование основных технологических параметров — рН. Описание, структура, назначение, примеры. Системы регулирования рН можно под разделить на два типа, в зависимости от требуемой точности регулирования. Если скорость изменения рН невелика, а допустимые пределы ее колебаний достаточно широки, применяют позиционные системы регулирования, поддерживающие рН в заданных пределах: рН н ≤ рН ≤ рНв. Ко 0G Второму типу относятся системы обеспечивающие регулирование процессов, в которых требуется точное поддержание рН на заданном значении (например, в процессах нейтрализации). Рис 1. Зависимость величины рН от расхода реагента.    pH G  0 Для различных значений pH на этой кривой можно выделить три характерных участка I—III: первый (средний), относящийся к почти нейтральным средам, близок к линейному и характеризуется очень большим коэффициентом усиления; второй и третий участки, относящиеся к сильнощелочным или кислым средам, обладают наибольшей кривизной. 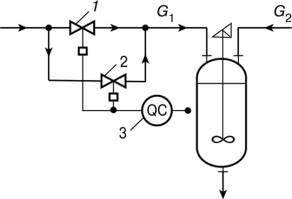 Рис. 71. Схема системы регулирования pH: 1, 2 — регулирующие клапаны; 3 — измеритель pH; 4 — регулятор pH Таким образом, при незначительном отклонении pH от pH0, когда (Хр - А) < Хр < (Хр + А), степень открытия клапана 1 практи- 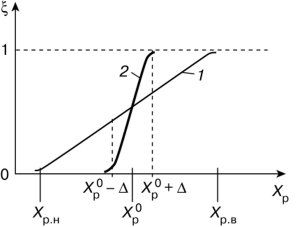 Рис. 72. Статические характеристики клапанов чески не изменяется и регулирование ведется клапаном 2. Если | Хр - Хр | > Д, клапан 2 остается в крайнем положении и регулирование осуществляется клапаном 1. На втором и третьем участках характеристики (см. рис. 70) ее линейная аппроксимация справедлива лишь в очень узком диапазоне изменения pH, и в реальных условиях ошибка регулирования за счет линеаризации может оказаться недопустимо большой. В этом случае более точные результаты дает кусочно-линейная аппроксимация, при которой линеаризованный объект имеет переменный коэффициент усиления, а АСР должна быть дополнена еще одним регулятором. В зависимости от рассогласования А pH в работу включается один из регулятов, настроенный на соответствующий коэффициент усиления. Для их регулирования используют непрерывные ПИ или ПИД регуляторы. Общей особенностью объектов при регулировании рН является нелинейность их статических характеристик, связанная с нелинейной зависимостью рН от расходов реагентов. |